

3.3 Оптический поток (Optical Flow)
Оптический поток — это изображение видимого движения объектов, поверхностей или краев сцены, получаемое в результате перемещения наблюдателя (глаз или камеры) относительно сцены. Алгоритмы, основанные на оптическом потоке, — такие как регистрация движения, сегментация объектов, кодирование движений и подсчет диспаритета в стерео, — используют это движение объектов, поверхностей и краев.
Оценка оптического потока
Методы,
основанные на оптическом потоке,
вычисляют движение между двумя кадрами,
взятыми в момент времени ![]() и
и![]() ,
в каждом пикселе. Эти методы называются
дифференциальными, так как они основаны
на приближении сигнала отрезкомряда
Тейлора;
таким образом, они используют частные
производные по времени и пространственным
координатам.
,
в каждом пикселе. Эти методы называются
дифференциальными, так как они основаны
на приближении сигнала отрезкомряда
Тейлора;
таким образом, они используют частные
производные по времени и пространственным
координатам.
В
случае размерности 2D+t (случаи
большей размерности аналогичны) пиксель
в позиции ![]() с
интенсивностью
с
интенсивностью![]() за
один кадр будет перемещен на
за
один кадр будет перемещен на![]() ,
,![]() и
и![]() ,
и можно записать следующее уравнение:
,
и можно записать следующее уравнение:
![]()
Считая, что перемещение мало, и используя ряд Тейлора, получаем:
![]() .
.
Из этих равенств следует:
![]()
или
![]()
отсюда получается, что
![]()
где
![]() —
компоненты
скорости оптического потока в
—
компоненты
скорости оптического потока в ![]() ,
,
![]() ,
, ![]() ,
, ![]() —
производные изображения в
—
производные изображения в ![]() в
соответствующих направлениях.
в
соответствующих направлениях.
Таким образом:
![]()
или
![]()
Полученное уравнение содержит две неизвестных и не может быть однозначно разрешено. Данное обстоятельство известно как проблема апертуры. Задачу решает наложение дополнительных ограничений —регуляризация.
Методы определения оптического потока:
Фазовая корреляция — инверсия нормализованного перекрестного спектра.
Блочные методы — минимизация суммы квадратов или суммы модулей разностей
Дифференциальные методы оценки оптического потока, основанные на частных производных сигнала:
Алгоритм Лукаса — Канаде — рассматриваются части изображения и аффинная модель движения
Horn–Schunck — минимизация функционала, описывающего отклонение от предположения о постоянстве яркости и гладкость получаемого векторного поля.
Buxton–Buxton — основан на модели движения границ объектов в последовательности изображений
Общие вариационные методы — модификации метода Horn-Schunck, использующие другие ограничения на данные и другие ограничения на гладкость.
Дискретные методы оптимизации — поисковое пространство квантуется, затем каждому пикселю изображения ставится в соответствие метка таким образом, чтобы расстояние между последовательными кадрами было минимальным. Оптимальное решение часто ищется с помощью алгоритмов нахождения минимального разреза и максимального потока в графе, линейного программирования или belief propagation.
Трекинг при помощи оптического потока часто применяется при использовании стационарных камер, таких как камеры в аэропортах или зданиях, а также стационарные камеры-видеорегистраторы.
В данной работе был использован метод с использованием алгоритма Лукаса-Канаде (рис. 4-6)

Рис. 4 Основное окно модели

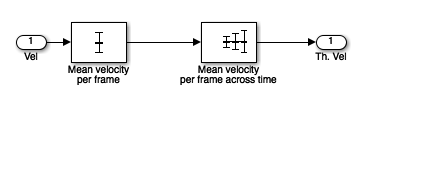
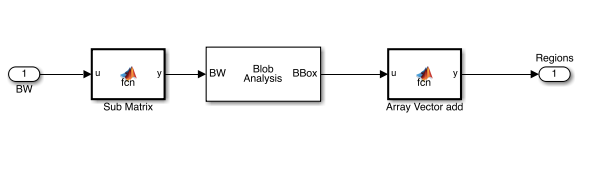

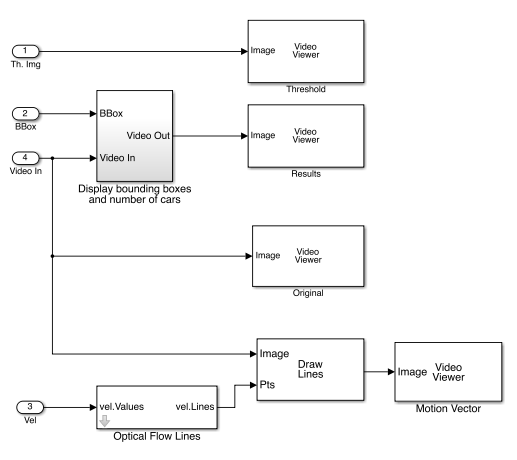
Рис. 5 Блоки модели

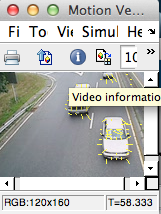
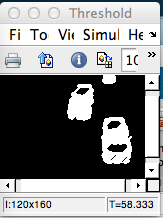
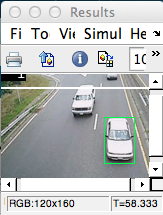
Рис. 6 Результат работы модели
Данная модель использует метод оценки оптического потока, чтобы определить векторы движения в каждом кадре видеофайла. Путём ограничения и морфологического приближения векторов движения, модель создает бинарные изображения признаков. Модель находит машину в каждом бинарном изображении через блок «Blob Analysis». Затем блок «Draw Shapes» чертит зелёный прямоугольник вокруг машин, которые проходят через белую линию.
Недостаток метода заключается в том, что камера должна быть неподвижна, иначе результат распознавания и трекинга становится непредсказуемым.