

Переносным для точки В является движение кривошипа ОА. Представим, что ОАВ – жесткий треугольник, вращающийся вместе с кривошипом вокруг оси О с угловой скоростью ω. Тогда скорость точки В этого треугольника, совпадающей с точкой В шатуна АВ, будет переносной скоростью точки В шатуна и направлена перпендикулярно ОВ:
ve = ω OB = ω(r cosφ+l cosβ).
Построив из векторов ve и vr параллелограмм скоростей, в котором диагональю является абсолютная скорость va, найдем
|
|
v = v |
/ cosβ = ω(r cosφ |
+l) . |
|
|
|
||||
|
|
|
r |
e |
|
cosβ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для получения зависимости vr(ϕ) исключим угол β. Заметим, что b |
|||||||||||
sinβ = r sin ϕ, и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosβ = 1 |
− |
r2 |
sin2 φ; v = ωb(1+ |
|
r cosφ |
|
|
). |
|||
b2 |
|
|
|
|
|||||||
|
|
|
|
|
r |
|
b2 − r2 sin2 |
φ |
|||
После этого можно получить
va = vr∙sinβ.
Учитывая, что sinβ = (rsinϕ)/b, получим va = (vrrsinϕ)/b.
Если r = b, то
vr = 2 ω∙b, va = 2ωb sinϕ.
2.5.3 Теорема о сложении ускорений (теорема Кориолиса)
Абсолютное ускорение точки
aa = ddtva = ddtvr + ddtve .
Производные справа определяют изменение каждого из векторов при абсолютном движении. Эти изменения слагаются из изменений при относительном и переносном движениях. Т.е. если отмечать изменения векторов vr и ve при относительном движении индексом 1, а при
переносном – индексом 2, то
a = |
dvr1 |
+ |
dvr 2 |
+ |
dve1 |
+ |
dve2 |
. |
(2.32) |
|
|
|
|
||||||
a |
dt |
|
dt |
|
dt |
|
dt |
|
|
|
|
|
|
|
|||||
87

По определению относительное ускорение характеризует изменение относительной скорости только при относительном движении, т.е. движение осей Oxyz (переносное) при этом во внимание не принимается.
Поэтому
ar = ddtvr1 .
В свою очередь, переносное ускорение характеризует изменение переносной скорости только при переносном движении, т.к. ae = am , где
m – точка, жестко связанная с осями Oxyz, и получает ускорение только при движении вместе с ними. Поэтому
|
|
|
a |
= |
|
dve2 |
. |
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
e |
|
|
|
dt |
|
||
В итоге |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
a |
= a |
+ a + dvr 2 |
+ |
dve1 |
. |
(2.33) |
|||||
|
|||||||||||
a |
r |
e |
dt |
|
|
|
dt |
|
|||
|
|
|
|
|
|
|
|||||
Обозначим |
|
|
|
|
|
|
|
|
|
|
|
|
a |
= dvr 2 |
+ |
dve1 |
− |
(2.34) |
|||||
|
|
||||||||||
|
kor |
dt |
|
dt |
|
||||||
|
|
|
|
||||||||
эта величина характеризует изменение относительной скорости точки при переносном движении и переносной скорости при ее относительном движении и называется поворотным, или кориолисовым, ускорением точки. Тогда
aa = ar + ae + akor . |
(2.35) |
Это не что иное, как теорема Кориолиса − При сложном движении
ускорение точки равно геометрической сумме трех ускорений – относительного, переносного и поворотного (кориолисова).
Можно показать, что кориолисово ускорение определяется зависимостью
akor = 2(ω×vrel ).
Кориолисово ускорение равно удвоенному векторному произведению переносной угловой скорости на относительную скорость точки.
При поступательном переносном движении угловая скорость равна
нулю, и тогда aa = ar + ae.
При поступательном переносном движении абсолютное ускорение точки равно геометрической сумме относительного и переносного ускорений, как в обычном случае по теореме о сложении скоростей.
88
Кориолисово ускорение обращается в ноль в случаях:
1.Когда переносное движение является поступательным (переносная угловая скорость равна нулю).
2.Когда равна нулю относительная скорость, т.е. точка «привязана»
кв подвижной системе координат.
3.Когда вектор скорости относительного движения vr параллелен
оси переносного вращения.
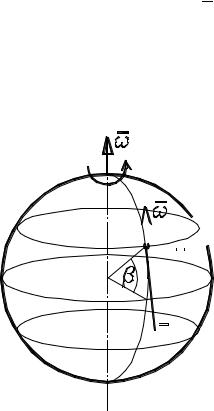
В качестве примера рассмотрим движение материальной точки по земному меридиану с севера на юг с постоянной относительной скоростью u (рисунок 2.32).
Определим модуль и направление кориолисова ускорения, когда точка находится на широте β.
Угол, который составляет вектор скорости u с осью вращению, равен β. Поэтому ускорение Кориолиса равно величине
akor = 2·ω·u·sin β,
где ω – скорость вращения Земли.
M



akor

 u
u
Рисунок 2.32 – Схема движения точки вдоль меридиана
Очевидно, что при β = 900 (на полюсе) кориолисово ускорение максимально, на экваторе, при β = 0 оно равно нулю.
По определению векторного произведения кориолисово ускорение направлено на восток. По этой причине в северном полушарии у реки, текущей на север, всегда правый берег подмывается водой, и является обычно более крутым, чем левый. Интересно отметить, что для реки, текущей в северном полушарии на юг, тоже правый ее берег (определяемый относительно направления течения) будет сильнее подмыт
89