

Билет 16
Гармони́ческий осцилля́тор (в классической механике) — система, которая при смещении из положения равновесия испытывает действие возвращающей силы F, пропорциональной смещению x (согласно закону Гука):
![]()
где k — коэффициент жёсткости системы.
Если F — единственная сила, действующая на систему, то систему называют простым или консервативным гармоническим осциллятором. Свободные колебания такой системы представляют собой периодическое движение около положения равновесия (гармонические колебания). Частота и амплитуда при этом постоянны, причём частота не зависит от амплитуды.
Если имеется ещё и сила трения (затухание), пропорциональная скорости движения (вязкое трение), то такую систему называют затухающим или диссипативным осциллятором. Если трение не слишком велико, то система совершает почти периодическое движение — синусоидальные колебания с постоянной частотой и экспоненциально убывающей амплитудой. Частота свободных колебаний затухающего осциллятора оказывается несколько ниже, чем у аналогичного осциллятора без трения.
Если осциллятор предоставлен сам себе, то говорят, что он совершает свободные колебания. Если же присутствует внешняя сила (зависящая от времени), то говорят, что осциллятор испытывает вынужденные колебания.
Механическими примерами гармонического осциллятора являются математический маятник (с малыми углами отклонения), груз на пружине, торсионный маятник и акустические системы. Среди других аналогов гармонического осциллятора стоит выделить электрический
Механи́ческое равнове́сие — состояние механической системы, при котором сумма всех сил, действующих на каждую её частицу, равна нулю и сумма моментов всех сил, приложенных к телу относительно любой произвольно взятой оси вращения, также равна нулю.
В состоянии равновесия тело находится в покое (вектор скорости равен нулю) в выбранной системе отсчета либо движется равномерно прямолинейно или вращается без касательного ускорения.
В случае, когда вторая производная отрицательна, потенциальная энергия системы находится в состоянии локального максимума. Это означает, что положение равновесия неустойчиво. Если система будет смещена на небольшое расстояние, то она продолжит своё движение за счёт сил, действующих на систему.
Возвращающая сила
Гармоническое колебаник точки характеризуется тем, что на неё действует сила, пропорциональная отклонению её от положения равновесия и направленная к этому положению. Она и называется возвращающей. Природа этой силы может быть какой угодно.
Билет 17
Простое гармоническое движение — это движение простого гармонического осциллятора, периодическое движение, которое не является ни вынужденным, ни затухающим. Тело в простом гармоническом движении подвергается воздействию единственной переменной силы, которая по модулю прямо пропорциональна смещению x от положения равновесия и направлена в обратную сторону.
Это движение является периодическим: тело колеблется около положения равновесия по синусоидальному закону. Каждое последующее колебание такое же, как и предыдущее, и период, частота и амплитуда колебаний остаются постоянными. Если принять, что положение равновесия находится в точке с координатой, равной нулю, то смещение x тела от положения равновесия в любой момент времени даётся формулой:
![]()
где A — амплитуда колебаний, f — частота, φ — начальная фаза.
Билет 19
Затухающий гармонический осциллятор
Основная статья: Затухающие колебания
Взяв за основу ту же модель, добавим в неё силу вязкого трения. Сила вязкого трения направлена против скорости движения груза относительно среды и пропорциональна этой скорости. Тогда полная сила, действующая на груз, записывается так:
![]()
Проводя аналогичные действия, получаем дифференциальное уравнение, описывающее затухающий осциллятор:
![]()
Здесь
введено обозначение: ![]() .
Коэффициент
.
Коэффициент![]() носит
название постоянной затухания. Он тоже
имеет размерность частоты.
носит
название постоянной затухания. Он тоже
имеет размерность частоты.
Решение же распадается на три случая.
При малом трении (
 )
общее решение записывается в виде:
)
общее решение записывается в виде:
![]() ,
где
,
где ![]() —
частота свободных колебаний.
—
частота свободных колебаний.
Затухание
 называюткритическим.
Начиная с такого значения показателя
затухания, осциллятор будет совершать
так называемое неколебательное движение.
В граничном случае движение происходит
по закону:
называюткритическим.
Начиная с такого значения показателя
затухания, осциллятор будет совершать
так называемое неколебательное движение.
В граничном случае движение происходит
по закону:
![]()
При сильном же трении
 решение
выглядит следующим образом:
решение
выглядит следующим образом:
![]() ,
где
,
где ![]()
Критическое затухание примечательно тем, что именно при критическом затухании осциллятор быстрее всего стремится в положение равновесия. Если трение меньше критического, он дойдёт до положения равновесия быстрее, однако «проскочит» его по инерции, и будет совершать колебания. Если трение больше критического, то осциллятор будет экспоненциально стремиться к положению равновесия, но тем медленнее, чем больше трение.
Поэтому в стрелочных индикаторах (например, в амперметрах) обычно стараются ввести именно критическое затухание, чтобы прочитать его показания можно было максимально быстро.
Затухание
осциллятора также часто характеризуют
безразмерным параметром,
называемым добротностью.
Добротность обычно обозначают буквой ![]() .
По определению, добротность равна:
.
По определению, добротность равна:
![]()
Чем больше добротность, тем медленнее затухают колебания осциллятора.
У осциллятора с критическим затуханием добротность равна 0,5. Соответственно, добротность указывает характер поведения осциллятора. Если добротность больше 0,5, то свободное движение осциллятора представляет собой колебания; со временем он пересечёт положение равновесия неограниченное количество раз. Добротность, меньшая или равная 0,5, соответствует неколебательному движению осциллятора; в свободном движении он пересечёт положение равновесия не более одного раза.
Добротность
иногда называют коэффициентом усиления
осциллятора, так как при некоторых
способах возбуждения при совпадении
частоты возбуждения с резонансной амплитуда
колебаний оказывается примерно в ![]() раз
больше, чем при возбуждении на низкой
частоте.
раз
больше, чем при возбуждении на низкой
частоте.
Также
добротность примерно равна количеству
колебательных циклов, за которое
амплитуда колебаний уменьшается в ![]() раз,
умноженному на
раз,
умноженному на![]() .
.
В случае колебательного движения затухание ещё характеризуют такими параметрами, как:
Время жизни колебаний (оно же время затухания, оно же время релаксации) τ — время, за которое амплитуда колебаний уменьшится в e раз.
![]()
Это время рассматривается как время, необходимое для затухания (прекращения) колебаний (хотя формально свободные колебания продолжаются бесконечно долго).
Логарифмический декремент затухания. Определяется как логарифм отношения двух последовательных максимальных отклонений в одну сторону:
 Величина,
обратнаяd,
есть количество колебаний, которое
пройдёт за время затухания τ.
Величина,
обратнаяd,
есть количество колебаний, которое
пройдёт за время затухания τ.Уравнение гармонических колебаний имеет вид:
 ,
где
A - амплитуда
колебаний (величина
наибольшего отклонения системы от
положения равновесия);
,
где
A - амплитуда
колебаний (величина
наибольшего отклонения системы от
положения равновесия);  - круговая
(циклическая) частота. Периодически
изменяющийся аргумент косинуса
- круговая
(циклическая) частота. Периодически
изменяющийся аргумент косинуса  -
называетсяфазой
колебаний.
Фаза колебаний определяет смещение
колеблющейся величины от положения
равновесия в данный момент времени t.
Постоянная φ представляет
собой значение фазы в момент времени
t = 0 и называется начальной
фазой колебания.
Значение начальной фазы определяется
выбором начала отсчета. Величина x может
принимать значения, лежащие в пределах
от -A до +A.
Промежуток времени T, через
который повторяются определенные
состояния колебательной системы, называется
периодом колебаний.
Косинус - периодическая функция с
периодом 2π, поэтому за промежуток
времени T, через который фаза колебаний
получит приращение равное 2π, состояние
системы, совершающей гармонические
колебания, будет повторяться. Этот
промежуток времени T называется периодом
гармонических колебаний.
-
называетсяфазой
колебаний.
Фаза колебаний определяет смещение
колеблющейся величины от положения
равновесия в данный момент времени t.
Постоянная φ представляет
собой значение фазы в момент времени
t = 0 и называется начальной
фазой колебания.
Значение начальной фазы определяется
выбором начала отсчета. Величина x может
принимать значения, лежащие в пределах
от -A до +A.
Промежуток времени T, через
который повторяются определенные
состояния колебательной системы, называется
периодом колебаний.
Косинус - периодическая функция с
периодом 2π, поэтому за промежуток
времени T, через который фаза колебаний
получит приращение равное 2π, состояние
системы, совершающей гармонические
колебания, будет повторяться. Этот
промежуток времени T называется периодом
гармонических колебаний.
Билет 20
Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Наиболее
простой и содержательный пример
вынужденных колебаний можно получить
из рассмотрения гармонического
осциллятора и
вынуждающей силы, которая изменяется
по закону: ![]() .
.
Резонанс
Из
решения видно, что при частоте вынуждающей
силы, равной частоте свободных колебаний,
оно не пригодно — возникает резонанс,
то есть «неограниченный» линейный рост
амплитуды со временем. Из курса математического
анализа известно,
что решение в этом случае надо искать
в виде: ![]() .
Подставим этот анзац в дифференциальное
уравнение и
получим, что :
.
Подставим этот анзац в дифференциальное
уравнение и
получим, что :
![]()
Таким образом, колебания в резонансе будут описываться следующим соотношением:
![]()
Резонансными
кривыми называются
зависимости тока и напряжения от частоты.
В качестве их примера на рис. 3 приведены
типовые кривые I(f); и
![]() для
цепи на рис. 1 при U=const.
для
цепи на рис. 1 при U=const.
Важной характеристикой резонансного контура является добротность Q, определяемая отношением напряжения на индуктивном (емкостном) элементе к входному напряжению:
|
|
(5) |
 ,
,
-
и характеризующая “избирательные”
свойства резонансного контура, в
частности его полосу
пропускания![]() .
.
Другим параметром резонансного контура является характеристическое сопротивление, связанное с добротностью соотношением
|
|
(6) |
или
с учетом (4) и (5) для ![]() можно
записать:
можно
записать:
|
|
(7) |
 .
. Рассмотрим временные параметры интегрирующей RC-цепи, определяемые из переходной характеристики, при подаче на вход RC-цепи прямоугольного импульса напряжения
Билет 21
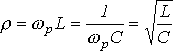
Если
имеется материальная точка ![]() ,
к которой приложена сила
,
к которой приложена сила ![]() ,
то момент силы относительно точки
,
то момент силы относительно точки ![]() равен
векторному произведению радиус-вектора
равен
векторному произведению радиус-вектора ![]() ,
соединяющего точки
,
соединяющего точки ![]() и
и ![]() ,
на вектор силы
,
на вектор силы ![]() :
:
![]() .
.
[Править]Момент силы относительно оси
Моментом силы относительно оси называется момент проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью.
дальнейшем нам придется столкнуться с проекцией момента импульса на некоторуюфиксированную (закрепленную) ось (например, ось z).
Эта величина называется моментом импульса относительно оси. Пусть частица массы m движется по окружности радиуса R вокруг этой оси.
Выберем
точку О, относительно которой определяются
вектора ![]() и
и![]() ,
на оси z. Тогда
,
на оси z. Тогда![]() .
Величина
.
Величина![]() называетсямоментом
инерции частицы
относительно оси.Таким
образом,
Lz=Iw,
т.е. момент
импульса относительно оси равен
произведению момента инерции на угловую
скорость вращения.
Закон
изменения момента импульса относительно
оси:
называетсямоментом
инерции частицы
относительно оси.Таким
образом,
Lz=Iw,
т.е. момент
импульса относительно оси равен
произведению момента инерции на угловую
скорость вращения.
Закон
изменения момента импульса относительно
оси:
 ,
где
Mz -- проекция момента силы на ту же ось
(или момент силы относительно оси).
,
где
Mz -- проекция момента силы на ту же ось
(или момент силы относительно оси).
Билет 22
Абсолю́тно твёрдое те́ло — второй опорный объект механики наряду с материальной точкой. Механика абсолютно твердого тела полностью сводима к механике материальных точек (с наложенными связями), но имеет собственное содержание (полезные понятия и соотношения, которые могут быть сформулированы в рамках модели абсолютно твердого тела), представляющее большой теоретический и практический интерес.
Существует несколько определений:
Абсолютно твёрдое тело — модельное понятие классической механики, обозначающее совокупность материальных точек, расстояния между которыми сохраняются в процессе любых движений, совершаемых этим телом. Иначе говоря, абсолютно твердое тело не только не изменяет свою форму, но и сохраняет неизменным распределение массы внутри.
Абсолютно твёрдое тело — механическая система, обладающая только поступательными и вращательными степенями свободы. «Твёрдость» означает, что тело не может быть деформировано, то есть телу нельзя передать никакой другой энергии, кроме кинетической энергии поступательного или вращательного движения.
Абсолютно твёрдое тело — тело (система), взаимное положение любых точек которого не изменяется, в каких бы процессах оно ни участвовало.
Таким образом, положение абсолютно твердого тела полностью определяется, например, положением жестко привязанной к нему декартовой системы координат (обычно ее начало координат делают совпадающим с центром масс твердого тела).
В трёхмерном пространстве и в случае отсутствия (других) связей абсолютно твёрдое тело обладает 6 степенями свободы: три поступательных и три вращательных. Исключение составляет двухатомная молекула или, на языке классической механики, твёрдый стержень нулевой толщины. Такая система имеет только две вращательных степени свободы.
Абсолютно твёрдых тел в природе не существует, однако в очень многих случаях, когда деформация тела мала и ей можно пренебречь, реальное тело может (приближенно) рассматриваться как абсолютно твёрдое тело без ущерба для задачи.
В рамках релятивистской механики понятие абсолютно твёрдого тела внутренне противоречиво, что показывает, в частности, парадокс Эренфеста. Другими словами, модель абсолютно твердого тела вообще говоря совершенно неприменима к случаю быстрых движений (сопоставимых по скорости со скоростью света), а также к случаю очень сильных гравитационных полей [1].
Вращением вокруг неподвижной оси называется такое движение твердого тела, при котором во все время движения две его точки остаются неподвижными. Прямая, проходящая через эти точки, называется осью вращения. Все остальные точки тела движутся в плоскостях, перпендикулярных оси вращения, по окружностям, центры которых лежат на оси вращения. Положение вращающегося твердого тела определяется одним параметром - углом φ между начальным положением АМ0О некоторой плоскости, связанной с телом и проходящей через ось, и ее положением АМО в данный момент времениЗакон вращательного движения:
![]()
Проекция вектора угловой скорости на ось и определяется зависимостью:
![]()
Угловая скорость ω рад/сек связана с числом оборотов в минуту n зависимостями:
![]()
Проекция вектора угловой скорости на ось u определяется зависимостью
![]()
Скорость и ускорение точки М вращающегося твердого тела определяются соотношениями (рис. 1):
![]()
или в скалярной форме:
![]()
![]()
Частные случаи:
1) равномерное вращение (ε=0):
![]()
2) равнопеременное вращение (εu=const):
![]()
![]()
Предположим, что точка О неподвижна. В случае одной материальной точки, дифференцируя (3), получаем
![]() .
.
При
неподвижной точке О вектор ![]() ,
равный
,
равный![]() ,
параллелен
,
параллелен![]() и
поэтому
и
поэтому![]() .
Кроме того
.
Кроме того![]() .
.
Таким
образом ![]() .
(5)
.
(5)
Это
уравнение моментов для одной материальной
точки
Момент инерции — скалярная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица
измерения СИ: кг·м².![]()
Для абсолютно твёрдого тела полную кинетическую энергию можно записать в виде суммы кинетической энергии поступательного и вращательного движения:
![]()
где:
![]() —
масса
тела
—
масса
тела
![]() —
скорость
центра масс тела
—
скорость
центра масс тела
![]() —
момент
инерции тела
—
момент
инерции тела
![]() —
угловая
скорость тела.
—
угловая
скорость тела.
Билет 23
ако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — один из фундаментальных законов сохранения. Математически выражается через векторную сумму всех моментов импульса относительно выбранной оси для замкнутой системы тел и остается постоянной, пока на систему не воздействуют внешние силы. В соответствии с этим момент импульса замкнутой системы в любой системе координат не изменяется со временем.
Закон сохранения момента импульса есть проявление изотропности пространства относительно поворота.
В упрощённом виде: ΣL(вектор)=const ,если система находится в равновесии.
Билет 24
Поскольку твердое тело обладает в общем случае шестью степенями свободы, то общая система уравнений движения должна содержать шесть независимых уравнений. Их можно представить в виде, определяющем производные по времени от двух векторов: импульса и момента тела.
Первое
из этих уравнений получается просто
путем суммирования уравнений ![]() =f для
каждой из составляющих тело частиц,
где p —
импульс частицы, а f —
действующая на нее сила. Вводя полный
импульс тела
=f для
каждой из составляющих тело частиц,
где p —
импульс частицы, а f —
действующая на нее сила. Вводя полный
импульс тела
P = ![]() p = μV
p = μV
и
полную действующую на него силу ![]() f=F,
получим
f=F,
получим
![]() = F.
(34.1)
= F.
(34.1)
Хотя мы определили F как сумму всех сил f, действующих на каждую их частиц, в том числе со стороны других частиц тела, фактически в F входят лишь силы, действующие со стороны внешних источников. Все силы взаимодействия между частицами самого тела взаимно сокращаются; действительно, при отсутствии внешних сил импульс тела, как и всякой замкнутой системы, должен сохраняться, т.е. должно быть F=0.
Если U — потенциальная энергия твердого тела во внешнем поле, то сила F может быть определена путем дифференцирования ее по координатам центра инерции тела:
F =
− ![]() .
(34.2)
.
(34.2)
Действительно,
при поступательном перемещении тела
на δR настолько
же меняются и радиус-векторы ![]() каждой
точки тела, а потому изменение потенциальной
энергии
каждой
точки тела, а потому изменение потенциальной
энергии
δU = ![]()
![]() δ
δ![]() = δR
= δR ![]()
![]() =
−δR
=
−δR ![]() f =
−FδR .
f =
−FδR .
Отметим в этой связи, что уравнение (34.1) может быть получено и как уравнение Лагранжа по отношению к координатам центра инерции
![]()
![]() =
= ![]()
с функцией Лагранжа (32.4), для которой
![]() = μV = P,
= μV = P,
![]() = −
= −![]() =F.
=F.
Перейдем к выводу второго уравнения движения, определяющего производную по времени от момента импульса M. Для упрощения вывода удобно выбрать «неподвижную» (инерциальную) систему отсчета таким образом, чтобы в данный момент времени центр инерции тела покоился относительно нее.
Имеем
![]() =
= ![]()
![]() [rp]
=
[rp]
= ![]() [
[![]() p]
+
p]
+ ![]() [r
[r![]() ].
].
В
силу сделанного нами выбора системы
отсчета (в котором V=0)
значение ![]() в
данный момент времени совпадает со
скоростьюv=
в
данный момент времени совпадает со
скоростьюv=![]() .
Поскольку же векторыv и p =
mv имеют
одинаковое направление, то [
.
Поскольку же векторыv и p =
mv имеют
одинаковое направление, то [![]() p]=0.
Заменив также
p]=0.
Заменив также ![]() на
силуf,
получим окончательно:
на
силуf,
получим окончательно:
![]() = K,
(34.3)
= K,
(34.3)
где
K = ![]() [rf].
(34.4)
[rf].
(34.4)
Поскольку момент М определен относительно центра инерции (см. здесь), он не меняется при переходе от одной инерциальной системы отсчета к другой. Это видно из формулы (9.5) с R=0. Отсюда следует, что зфавнение движения (34.3), полученное здесь при определенном выборе системы отсчета, тем самым, в силу галилеевского принципа относительности, справедливо в любой инерциальной системе.
Вектор [rf] называется моментом силы f, так что K есть сумма моментов всех сил, действующих на тело. Как и в полной силе F, в сумме (34.4) фактически должны учитываться лишь внешние силы; в соответствии с законом сохранения момента импульса сумма моментов всех сил, действующих внутри замкнутой системы, должна обращаться в нуль.
Условия
равновесия абсолютно твердого
тела
относительно
инерциальной системы отсчета.
1.
Векторная сумма всех сил, действующих
на тело, равна нулю: ![]() .
2.
Сумма моментов всех
внешних сил, действующих на тело,
относительно любой оси равна нулю:
.
2.
Сумма моментов всех
внешних сил, действующих на тело,
относительно любой оси равна нулю: ![]() .
Ось может быть как реальной (неподвижной),
так и мысленно проведенной через любую
точку пространств.
.
Ось может быть как реальной (неподвижной),
так и мысленно проведенной через любую
точку пространств.
Билет 25
Идеа́льная жи́дкость — в гидродинамике — воображаемая (идеализированная) жидкость, в которой, в отличие от реальной жидкости, отсутствует вязкость . В идеальной жидкости отсутствует внутреннее трение, то есть, нет касательных напряжений между двумя соседними слоями.
Моделью идеальной жидкости пользуются при теоретическом рассмотрении задач, в которых вязкость не является определяющим фактором и ею можно пренебречь. В частности, такая идеализация допустима во многих случаях течения, рассматриваемых гидроаэромеханикой, и даёт хорошее описание реальных течений жидкостей и газов на достаточном удалении от омываемых твёрдых поверхностей и поверхностей раздела с неподвижной средой. Математическое описание течений идеальных жидкостей позволяет найти теоретическое решение ряда задач о движении жидкостей и газов в каналах различной формы, при истечении струй и при обтекании тел.
Пусть ![]() .
Используя известную формулу
.
Используя известную формулу
![]() ,
,
перепишем соотношение в форме
![]()
Беря ротор и учитывая, что
![]() ,
,
а частные производные коммутируют, получаем что
|
|
Билет
26 Уравнение
Бернулли для стационарного течения
идеальной несжимаемой жидкости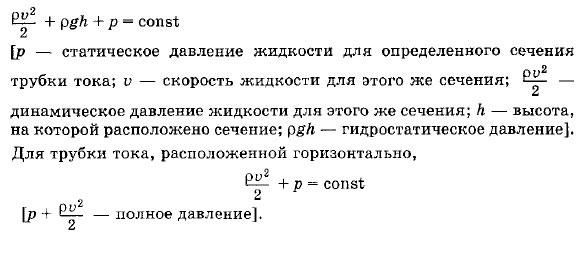
Фо́рмула Торриче́лли – связывает скорость истечения жидкости из малого отверстия в открытом сосуде с высотой жидкости над отверстием[1].
Формула
Торричелли утверждает, что
скорость ![]() истечения
жидкости через отверстие в тонкой
стенке, находящееся в ёмкости на
глубине
истечения
жидкости через отверстие в тонкой
стенке, находящееся в ёмкости на
глубине![]() от
поверхности, такая же, как и у тела,
свободно падающего с высоты
от
поверхности, такая же, как и у тела,
свободно падающего с высоты![]() ,
то есть
,
то есть
![]()
где ![]() –ускорение
свободного падения.
–ускорение
свободного падения.
Последнее
выражение получено в результате
приравнивания приобретённой кинетической
энергии ![]() и
потерянной потенциальной энергии
и
потерянной потенциальной энергии![]() .
.
Эта формула была получена (хотя и не в приведённой выше форме) итальянским учёным Эванджелиста Торричелли, в 1643 году. Позже было показано, что эта формула является следствием закона Бернулли.
Билет 27
В 1851 Джордж Стокс получил выражение для силы трения (также называемой силой лобового сопротивления), действующей на сферические объекты с очень маленькими числами Рейнольдса (например, очень маленькие частицы) в непрерывной вязкой жидкости, решая уравнение Навье — Стокса:
![]()
где
 —
сила
трения, так же называемая силой Стокса,
—
сила
трения, так же называемая силой Стокса, —
радиус
сферического объекта,
—
радиус
сферического объекта, — динамическая
вязкость жидкости,
— динамическая
вязкость жидкости, —
скорость
частицы.
—
скорость
частицы.
Если частицы падают в вязкой жидкости под действием собственного веса, то установившаяся скорость достигается, когда эта сила трения совместно с силой Архимеда точно уравновешиваются силой гравитации. Результирующая скорость равна
![]()
где
Vs — установившаяся скорость частицы (м/с) (частица движется вниз если
 ,
и вверх в случае
,
и вверх в случае ),
), —
радиус
Стокса частицы (м),
—
радиус
Стокса частицы (м),g — ускорение свободного падения (м/с²),
ρp — плотность частиц (кг/м³),
ρf — плотность жидкости (кг/м³),
 —
динамическая вязкость жидкости
(Па с).
—
динамическая вязкость жидкости
(Па с).
БИЛЕТ 28
При́нцип относи́тельности — фундаментальный физический принцип, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения.
Отсюда следует, что все законы природы одинаковы во всех инерциальных системах отсчёта.[1]
Различают принцип относительности Эйнштейна (который приведён выше) и принцип относительности Галилея, который утверждает то же самое, но не для всех законов природы, а только для законов классической механики, подразумевая применимость преобразований Галилея, оставляя открытым вопрос о применимости принципа относительности к оптике иэлектродинамике.
В современной литературе принцип относительности в его применении к инерциальным системам отсчета (чаще всего при отсутствии гравитации или при пренебрежении ею) обычно выступает терминологически как лоренц-ковариантность (или лоренц-инвариантность).