

§ 4. Смысл динамических уравнений
Попытаемся теперь понять, что же означает уравнение (9.12). Пусть в данный момент времени t тело находится в точке х и движется со скоростью vx. Каково будет его положение и скорость спустя небольшой промежуток времени, т. е. в момент t+? Если мы сможем ответить на этот вопрос, то проблема решена, так как, исходя из начальных условий, т. е. положения и скорости в некоторый начальный момент времени, можно сказать, как они изменяются в первый момент, а зная положение и скорость в первый момент, можно найти их и в следующий и т. д. Таким образом, шаг за шагом выстраивается вся картина движения. Для большей определенности предположим, что в момент t=0 положение грузика х=1, а его скорость vx=0. Почему вообще движется грузик? Да потому, что на него в любом положении, за исключением положения равновесия х=0, действует сила. Если х>0, то эта сила направлена вверх. Следовательно, скорость, которая вначале была нулем, благодаря уравнениям движения начинает изменяться. Но как только скорость начинает возрастать, грузик приходит в движение. Для любого момента времени t при очень малом е можно с достаточно хорошей точностью найти положение в момент t+е через скорость и положение в момент t:
x(t+)=x(t)+ vx(t). (9.13)
Конечно, это выражение тем точнее, чем меньше , но оно может быть достаточно точным, даже когда интервал не исчезающе мал. Что теперь можно сказать о скорости? Чтобы определить скорость в момент t+, очевидно, нужно знать, как она изменяется со временем, т. е. нужно знать ускорение. А как узнать его? Вот здесь-то нам на помощь приходят уравнения динамики. Именно они позволяют определить, чему равно ускорение. В нашей задаче уравнение динамики говорит, что ускорение равно -x. Поэтому
vx(t+)=vx(t)+ ax(t), (9.14)
= vx(t)- x(t). (9.15)
Уравнение (9.14) еще кинематическое; оно просто говорит о том, что из-за наличия ускорения скорость изменяется. Однако уравнение (9.15) уже динамическое, потому что оно связывает ускорение с силой. Оно говорит, что в данной частной задаче для данного момента времени ускорение можно заменить на -х(t). Следовательно, если в какой-то момент времени нам известны положение х и скорость vx, то мы знаем и ускорение, которое дает возможность найти скорость в следующий момент, а скорость в свою очередь определяет новое положение и т. д. Вот каким образом действует весь этот динамический механизм! Действующая сила немного изменяет скорость, а скорость приводит к небольшому изменению положения.
§ 5. Численнов решение уравнений
Давайте теперь действительно решим нашу задачу. Допустим, что мы взяли =0,100 сек. (Если после того, как мы проделаем все вычисления, окажется, что этот интервал не достаточно мал, то необходимо повторить все сначала с меньшим интервалом времени, например 0,010 сек.) Чему будет равно х(0,1), если в начальный момент времени х (0) = 1? Оно равно старому положению х(0) плюс скорость в начальный момент (которая равна нулю), умноженная на 0,10 сек. Таким образом, х(0,1) равно 1,00, ибо грузик еще не начал двигаться. Но новая скорость в момент 0,10 сек будет равна старой скорости v (0)=0 плюс , умноженное на ускорение. А само ускорение равно -х(0)=-1,00. Так что
v(0,1)=0,00+0,10•1,00=-0,10. В момент 0,20 сек
х(0,2)=х(0,1)+v(0,1)=1,00-0,10•0,10=0,99
и
v(0,2)=v(0,1)+ a(0,1) =-0,10-0,10•1,00 =-0,20.
Продолжая эту процедуру еще и еще, можно найти положение и скорость в любой момент времени, а это как раз то, что нам нужно. Однако практически мы используем нехитрый прием, который позволит увеличить точность вычислений. Если бы мы продолжали начатые нами расчеты, то они оказались бы довольно грубыми, поскольку интервал =0,10 сек довольно большой. Пришлось бы уменьшить его, скажем, до 0,01 сек. Но тогда, чтобы проследить движение за какой-то разумный отрезок времени, потребовалось бы сделать множество шагов. Мы же организуем процесс таким образом, что сможем увеличить точность, используя тот же интервал =0,10 сек. Этого можно достичь, несколько изменив метод расчета.
Заметьте, что новое положение тела равно старому плюс интервал времени , умноженный на скорость. Но что это за скорость? В какой момент? В начале интервала одна скорость, а в конце она совсем другая. Прием состоит в том, чтобы брать скорость в середине интервала. Если известна скорость в настоящий момент и известно, что она меняется, как же можно надеяться получить удовлетворительный результат, считая, что тело все время движется с той же скоростью, что и в настоящий момент? Более разумно использовать какую-то среднюю скорость между началом и концом интервала. Те же рассуждения применимы к изменению самой скорости: для подсчета ее изменений нужно использовать ускорение в средней точке между двумя моментами времени, в которых необходимо найти скорость. Таким образом, реально мы будем пользоваться следующими уравнениями: положение в конце интервала равно положению в начале плюс интервал , умноженный на скорость в середине интервала. Эта скорость в свою очередь равна скорости в середине предыдущего интервала (т. е. на отрезок меньше) плюс ускорение в начале интервала, умноженное на .
Таким образом, мы будем пользоваться уравнениями

Остается еще один небольшой вопрос: что такое v (/2)? Вначале у нас было v (0), а не v (-/2). Но теперь, чтобы начать наши вычисления, необходимо использовать дополнительное уравнение v(/2)=v (0)+( /2)а(0).
Таблица 9.1 • решение уравнения (dvx/dt)=-x Интервал =0,10 сек
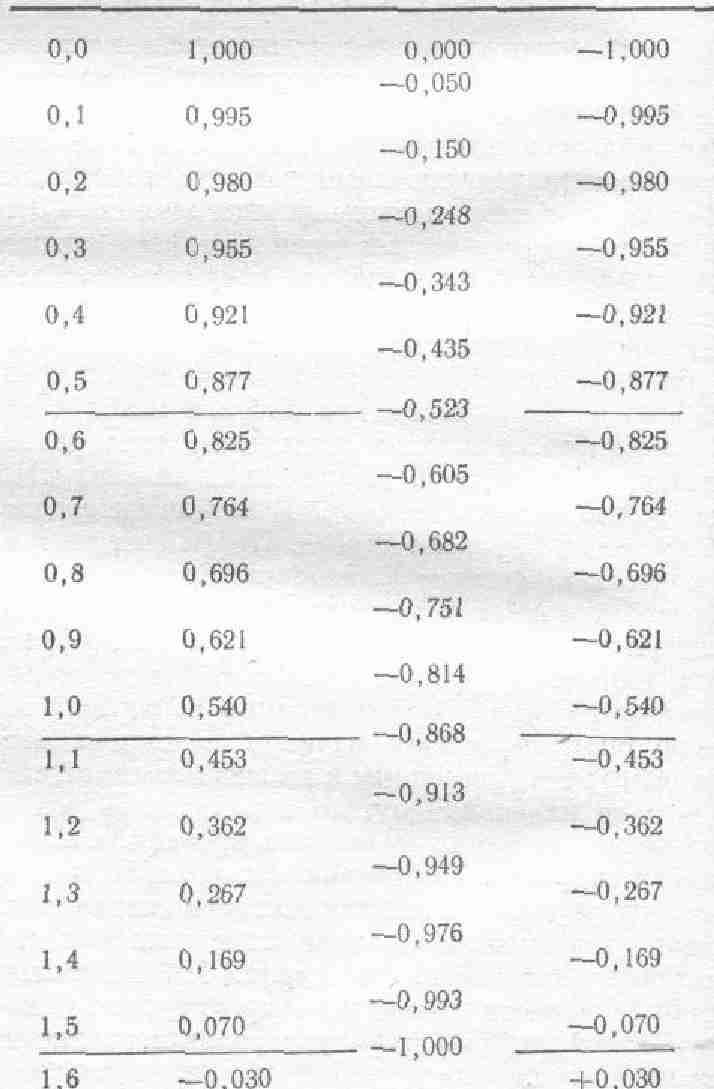
Ну, а теперь все готово для расчетов. Для удобства можно их выполнить в виде таблицы, в столбцах которой стоят время, положение, скорость и ускорение, причем скорость пишется в промежутках между строками (табл. 9.1). Такая таблица есть, конечно, просто удобный способ записи результатов, полученных из уравнений (9.16), и фактически полностью заменяет их. Мы просто заполняем одно за другим свободные места в ней и получаем очень интересную картину движения: сначала грузик находится в покое, затем понемногу приобретает отрицательную скорость (вверх), а это приводит к уменьшению его расстояния от точки равновесия. При этом хотя ускорение и становится меньше, оно все еще «подгоняет» скорость. Однако по мере приближения к положению равновесия (х=0) ускорение становится все меньше и меньше, скорость нарастает все медленней и медленней, но все же еще нарастает вплоть до точки x=0, которая достигается примерно через 1,5 сек. Скажем по секрету, что произойдет дальше. Грузик, конечно, не остановится в точке х=0, а пойдет дальше, но теперь все пойдет наоборот: его положение х станет отрицательным, а ускорение — положительным. Скорость начнет уменьшаться. Интересно сравнить полученные нами числа с функцией cost. Результат этого сравнения представлен на фиг. 9.4.
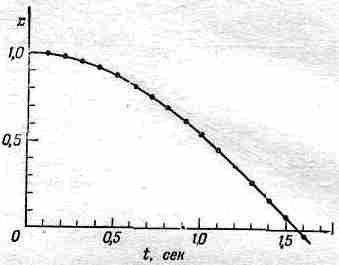
Фиг. 9.4. График движения грузика на пружинке.
Оказывается, что в пределах точности наших расчетов (три знака после запятой) совпадение полное! Позднее вы узнаете, что функция cos t — точное решение нашего уравнения, так что у вас теперь есть наглядное представление о мощи численного анализа: столь простой расчет дает столь точный результат.