

Курсовые задания
.pdf
|
|
Рис. С2.8 |
|
|
|
Рис. С2.9 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица С2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|||||
|
Силы |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
||
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
δ,град |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
F1 = 4 кН |
|
|
|
F2 = 6 кН |
|
F3 = 8 кН |
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
Номер |
Точкаприложения |
α,град |
Точкаприложения |
β,град |
Точкаприложения |
γ,град |
|
|
||||||||||
|
условия |
|
|
||||||||||||||||
|
0 |
D |
30 |
|
|
K |
60 |
– |
– |
45 |
|
||||||||
|
1 |
– |
– |
|
|
E |
30 |
H |
45 |
60 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
K |
45 |
|
|
– |
– |
D |
60 |
30 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
E |
30 |
|
|
H |
45 |
– |
– |
60 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
– |
– |
|
|
D |
60 |
E |
30 |
45 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
H |
45 |
|
|
– |
– |
K |
60 |
30 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
K |
60 |
|
|
E |
30 |
– |
– |
45 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
– |
– |
|
|
H |
45 |
K |
60 |
30 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
H |
60 |
|
|
– |
– |
E |
30 |
60 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
E |
45 |
|
|
D |
60 |
– |
– |
30 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример решения задания С2
Конструкция, состоящая из двух однородных прямоугольных тонких плит, соединенных по линии AD, закреплена сферическим шарниром в точке А, цилиндрическим (подшипником) в точке В и невесомым стержнем 1. Большая плита горизонтальна, а меньшая образует с вертикальной плоскостью угол β. Стержень 1 образует с горизонтальной плоскостью угол γ. Вес большей плиты Р1, вес меньшей плиты Р2. На конструкцию в плоско-
сти, параллельной xz, действует сила F , а в плоскости меньшей плиты – пара сил с моментом М.
Дано: Р1 = 5 кН, Р2 = 3 кН, F = 6 кН, М = 4 кН м, а = 0,4 м, α = 60°, β = 30°, γ = 22°, BE = CE.
Определить: реакции опор А, В и стержня 1.
Решение
1 Рассмотрим равновесие конструкции. На конструкцию действуют заданные силы P1 , P2 , F и пара сил с моментом М, а также реакции связей. Реакцию сферического шарнира разложим на три составляющие
Рис. С2
X A , YA , Z A , цилиндрического (подшипника) – на две составляющие X B , ZB (в плоскости, перпендикулярной оси подшипника); реакцию N стержня направляем вдоль стержня от С к С', предполагая, что он растянут. Век- тор-момент пары сил M направляем перпендикулярно плоскости действия пары сил в такую сторону, чтобы,
смотря навстречу этому вектору, видеть пару сил, стремящуюся вращать конструкцию вокруг M в сторону, обратную вращению часовой стрелки.
2 Для определения шести неизвестных реакций составляем шесть уравнений равновесия действующей на конструкцию пространственной системы сил:
∑Fkx = 0 : X A + X B + F cos α− N cos γcos δ = 0 ; |
(1) |
|
|
|
|
|
|
|
∑Fky = 0 : YA + N cos γsin δ = 0 ; |
(2) |
|
|
|
|
|
∑Fkz = 0 : Z A + ZB − P1 − P2 + N sin γ + F sin α = 0 ; |
(3) |
||
∑M X ( |
Fk )= 0 : −ZB 3a −F sin α 3a − N sin γ 3a + P1 1,5a − P2 0,5asin β = 0 ; |
(4) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MY ( |
Fk )= 0 : −N sin γ 2a − F sin α a + P1a + P2a + M cosβ = 0 ; |
(5) |
|
|
|
|
|
|
∑M Z ( |
Fk )= 0 : X B 3a + F cos α 3a + M sin β = 0. |
(6) |
|
|
|
При определении проекций силы |
|
на оси x и y в уравнениях (1) и (2) удобнее сначала найти проекцию |
||||
N |
||||||||
|
|
′ этой силы на плоскость xoy (численно N′ = N cos γ ), а затем найденную проекцию на плоскость спроекти- |
||||||
N |
||||||||
ровать на оси x, y. Для определения моментов сил F и N относительно осей разлагаем их на составляющие F ′, F ′′ и N ′, N ′′ и применяем теорему Вариньона, M X (F )= M X (F ′)+ M X (F ′′) и т.д. Составляя уравнения моментов, учитываем, что сумма моментов сил, образующих пару относительно некоторой оси, равна проекции на эту ось вектора-момента пары, MY (Q )+ MY (Q ′)= MY .
Подставив в составленные уравнения числовые значения всех заданных величин и решив эти уравнения, найдем искомые реакции.
Ответ: XA = 9,54 кН, YA = –11,80 кН, ZA = 5,75 кН, XB = –4,67 кН, ZB = –8,68 кН; N = 15,30 кН. Знак минус указывает, что реакции YA , X B , ZB направлены противоположно показанным на рис. С2.
КИНЕМАТИКА Задание К1
ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ДВИЖЕНИЯ ТОЧКИ
По заданным уравнениям движения точки x = f1(t), y = f2 (t) найти уравнение траектории точки, а также ее скорость, нормальное, касательное и полное ускорения, радиус кривизны траектории для t1 =1 с. На рисунке показать вид траектории, положение точки для t1 =1 с и в этом положении найденные векторные величины. Уравнения движения точки указаны в табл. К1. Выбор варианта: x = f1(t) находится по предпоследней цифре шифра, а y = f2 (t) – по последней цифре.
Таблица К1
Цифры |
x = f1(t), м |
y = f2 (t), м |
||||||||||||||||||||||||||||
шифра |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2sin |
|
|
π |
|
3 −cos |
|
π |
|
t |
||||||||||||||||||||
6 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||||||||||
1 |
2 −3cos |
π |
|
t |
1+ 2sin |
|
π |
|
t |
|||||||||||||||||||||
|
|
|
|
|
|
6 |
||||||||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
π |
|
π |
|
|
|
|
|
|
|
|||||||||||||
2 |
−1+2sin |
|
|
|
|
|
|
|
t |
3cos |
|
|
|
t |
||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|||||||||||||||||||||
|
|
3 |
||||||||||||||||||||||||||||
|
|
|
|
π |
−2sin |
|
|
π |
|
|
t |
|||||||||||||||||||
3 |
3 +cos |
|
|
|
|
|
|
t |
|
|
|
|
|
|||||||||||||||||
|
6 |
|
6 |
|
||||||||||||||||||||||||||
4 |
1 +3sin |
|
π |
t |
4 −cos |
π |
t |
|||||||||||||||||||||||
6 |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||||||||||
5 |
−2 +cos |
|
π |
t |
−1−2sin |
|
π |
|
t |
|||||||||||||||||||||
3 |
|
6 |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
6 |
−3 +sin |
π |
t |
−2 +3cos |
|
|
π |
t |
||||||||||||||||||||||
|
|
6 |
||||||||||||||||||||||||||||
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
7 |
5 −cos |
π |
t |
3 −2 cos |
π |
t |
||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
||||||||||||
8 |
−4 +2sin |
π |
t |
2 +3cos |
π |
t |
|||||
6 |
3 |
||||||||||
|
|
|
|
|
|
|
|
||||
9 |
2cos |
π |
t |
|
|
−3 +2 cos |
π |
t |
|||
3 |
|
|
|
||||||||
|
|
|
|
|
|
6 |
|
||||
Методические указания
Перед выполнением задания К1 необходимо изучить тему «Координатный способ задания движения точки, скорость и ускорение точки»; при этом рекомендуется рассмотреть пример решения и решить самостоя-
тельно следующие задачи: [1, т. 1 – 3.29, 3.33]; [6 – К1]; [5 – 12.17, 12.18, 12.27].
При решении задачи на определение уравнения траектории точки и ее кинематических характеристик целесообразно придерживаться следующего порядка:
1)исключить из уравнений движения точки в координатной форме время и получить уравнение относительно координат точки;
2)построить линию, уравнение которой получено, указав при этом, является ли траекторией движения точки вся линия или какая ее часть в случае, если координаты точки являются тригонометрическими функциями времени;
3)по уравнениям движения точки найти ее координаты, проекции скорости и ускорения на оси координат
вданный момент времени, показать на чертеже положение точки и построить векторы скорости и ускорения;
4)определить касательное и нормальное ускорения точки в данный момент времени и показать на чертеже разложение вектора ускорения точки на указанные составляющие;
5)определить по направлениям векторов скорости и касательного ускорения точки, является ли ее движение в данный момент времени ускоренным или замедленным;
6)найти радиус кривизны в соответствующей точке траектории.
В случае, если в уравнениях движения точки углы под знаком синуса и косинуса не равны, а относятся как 1 : 2 (или 2 : 1), то для определения уравнения траектории точки надо использовать формулы тригонометрии вида: cos 2α =1−2sin2 α = 2 cos2 α−1 .
Пример решения задания К1
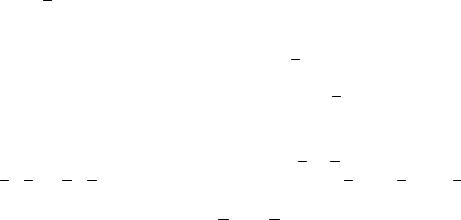
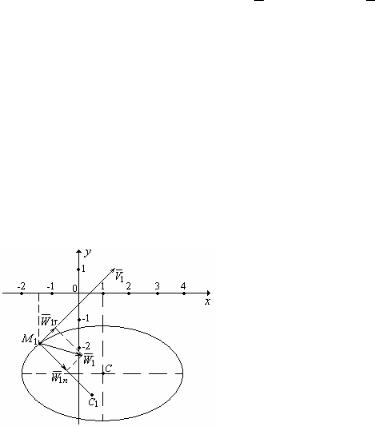
Решить задачу К1 для следующих уравнений движения точки М: x =1−3cos π6 t м, y = −3 +2sin π6 t м.
Решение
1 Нахождение траектории движения точки М. Из данных уравнений движения исключим параметр t, воспользовавшись формулой тригонометрии: sin2 α + cos2 α =1 , где α = πt / 6 .
cos |
π |
t = − |
x −1 |
; |
sin |
π |
t = |
y +3 |
; |
(x −1)2 |
+ |
(y +3)2 |
=1. |
6 |
|
6 |
2 |
32 |
22 |
||||||||
|
3 |
|
|
|
|
|
|
||||||
Уравнением траектории является эллипс с полуосями a = 3 , b = 2 и центром в точке С (1; –3). Найдем координаты точки М в момент t1 =1 с:
x =1−3cos |
π |
≈ −1,6 ; |
y = −3 +2sin |
π |
= −2 ; |
M |
1 |
(–1,6; 2). |
|
|
|||||||
1 |
6 |
|
1 |
6 |
|
|
|
|
|
|
|
|
|
|
|
Покажем на рис. К1 траекторию и положение точки M1 на ней.
Рис. К1
2 Определение скорости точки. Проекции скорости точки на оси координат равны
Vx = |
dx |
= |
π |
sin |
π |
t ; |
Vy = |
dy |
= |
π |
cos |
π |
t . |
|
dt |
2 |
6 |
dt |
3 |
6 |
|||||||||
|
|
|
|
|
|
|
|
|
|
Модуль скорости точки V = |
|
V |
2 |
+V 2 |
|
. При t =1 с: V |
|
= |
π |
|
sin |
π |
≈ 0,785 |
м/с; V |
= |
π |
cos |
π |
≈ 0,905 м/с; |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
y |
|
|
|
|
|
|
|
|
1 |
|
|
|
1x |
|
2 |
|
|
6 |
|
|
|
|
|
1y |
3 |
|
|
6 |
|
||||||||||
V1 =1,2 м/с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
Покажем на рисунке вектор скорости V1 |
с учетом знаков его проекций, который направлен по касательной |
|||||||||||||||||||||||||||||||||||||||||||||||||||
к эллипсу в точке M1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
3 Определение полного ускорения точки. Проекции ускорения на оси координат равны |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Wx |
= |
dV |
x |
= |
|
π2 |
|
cos |
π |
|
t |
; |
|
Wy = |
|
dVy |
|
= − |
π2 |
sin |
π |
t . |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
12 |
|
6 |
|
|
|
|
dt |
18 |
6 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
Модуль ускорения равен W = |
|
W |
2 |
+W 2 . При t =1 с: W |
|
|
= 0,71 м/с2; |
W |
|
= −0,27 м/с2; |
|
W = 0,76 м/с2. |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
y |
|
|
|
|
|
1 |
|
1x |
|
|
|
|
|
|
|
|
|
|
|
1y |
|
|
|
|
|
1 |
|
||||||||||||
|
|
Покажем на рисунке вектор ускорения |
|
с учетом знаков проекций этого вектора. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
W1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
4 Определение касательного ускорения точки. Касательное ускорение определяется по формуле |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wτ |
= |
dV |
|
|
= |
VxWx +VyWy |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
При t =1 с: |
W |
= |
V1xW1x +V1yW1y |
|
≈ 0,26 м/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
1 |
|
1τ |
|
|
V1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
5 Определение нормального ускорения точки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W = |
|
W 2 −W |
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Для момента времени t =1 с: W |
|
|
= |
W 2 |
−W |
2 |
|
|
|
≈ 0,71 м/с2. Разложим вектор ускорения |
|
на касательное |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
W |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
1n |
|
|
1 |
|
|
|
1τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||||||||
|
|
τ и нормальное |
|
n ускорения, показав их на рисунке. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
W1 |
W1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
Направления векторов |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
W1 |
τ и V1 |
одинаковы, |
|
поэтому движение точки в данный момент времени является |
||||||||||||||||||||||||||||||||||||||||||||||||
ускоренным. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6Определение радиуса кривизны траектории
ρ= V 2 .
Wn
|
|
|
V 2 |
|
|
|
|
|
|
||
При t =1 с: ρ = |
1 |
|
≈ 2 м. Покажем на рис. К1 радиус кривизны траектории: ρ = C M |
1 |
. |
||||||
|
|
||||||||||
1 |
1 |
W1n |
|
|
1 |
1 |
|
||||
|
|
|
|
|
|
|
|
||||
Ответ: V =1,2 м/с, |
W = 0,76 м/с2, W |
= 0,26 м/с2, W |
= 0,71 м/с2, ρ = 2 м. |
|
|
|
|||||
|
1 |
|
|
1 |
1τ |
1n |
1 |
|
|
|
|
|
|
|
|
|
|
|
Задание |
К2 |
|
|
|
ОПРЕДЕЛЕНИЕ АБСОЛЮТНОЙ СКОРОСТИ И АБСОЛЮТНОГО УСКОРЕНИЯ ТОЧКИ
Тело D совершает вращательное движение вокруг неподвижной оси по закону ϕe = f1(t). Относительно
тела D вдоль прямолинейного или в форме дуги окружности радиуса R желоба AB движется точка М по закону
АМ = sr = f2 (t).
На рис. К2.0 – К2.9 точка М показана в положении, при котором АМ = sr > 0 ; положительное направление отсчета угла ϕe указано круговой стрелкой, размеры на рисунках и величина R указаны в метрах. Найти абсолютные скорость и ускорение точки М в момент времени t1 =1 с. Числовые данные приведены в табл. К2, при этом номер рисунка и f1(t) выбираются по предпоследней цифре шифра, а f2 (t) – по последней цифре шифра из соответствующей графы для своего рисунка.
Таблица К2
|
Цифрышифра |
ϕe = f1(t), рад |
sr = f2 (t), м |
|
|
sr = f2 (t), м |
||
|
|
|
|
|
|
|
|
|
|
для всех рисун- |
для рис. К2.0 – |
для рис. К2.5 – К2.9 |
|||||
|
|
ков |
К2.4 |
|||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0 |
2t2 −3t |
4t2 −3t +5 |
|
π |
|
R(3t3 −2t2 ) |
|
|
3 |
|||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
t3 −2t2 |
5t +2t2 −3 |
|
|
π |
R(4t2 −3t) |
|
|
2 |
|||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2 |
t2 −5t |
3t2 −4t3 +4 |
π |
|
R(5t3 |
−4t2 ) |
||||||
6 |
||||||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
3 |
5t −t3 |
4t − 2t 2 +1 |
|
|
π |
|
R(5t2 −3t) |
|||||
6 |
||||||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
4 |
t2 −t3 |
8t2 −4t3 +2 |
π |
|
R(5t3 |
−3t2 ) |
||||||
3 |
||||||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
5 |
2t +t2 |
5t 2 −3t3 +3 |
|
|
π |
|
R(3t3 |
−2t) |
||||
2 |
||||||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
6 |
t3 −t2 |
2t 2 + 2t +1 |
|
π |
R(7t 2 |
−6t) |
||||||
4 |
||||||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
7 |
t2 −3t |
4t2 +2t3 −2 |
|
|
|
π |
R(2t3 −t) |
|||||
3 |
||||||||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
8 |
t3 −2t |
3t2 −3t +4 |
|
|
π |
R(3t3 |
−t2 ) |
|||||
6 |
||||||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||
9 |
2t2 −t |
3t2 −t +2 |
|
|
π |
R(5t3 |
−3t) |
|||||
6 |
||||||||||||
|
|
|
|
|
|
|||||||
Методические указания
Перед выполнением задания К2 необходимо изучить тему «Сложное движение точки»; при этом рекомендуется разобрать пример решения и решить самостоятельно следующие задачи: [1, т. 1 – 5.12, 5.13, 5.14]; [6 –
К7]; [5 – 22.14, 22.25, 23.27].
При решении задачи рекомендуется придерживаться следующей последовательности:
1)разложить абсолютное движение точки на составляющие, определив относительное и переносное дви-
жения;
2)определить положение точки относительно пластины в данный момент времени; в случае, если траекторией относительного движения является окружность, положение точки определяется центральным углом
α = sRr , где в правую часть этого равенства следует подставить t1 =1 с, не подставляя числового значения R;
3)определить скорость, касательное и нормальное ускорения относительного движения точки;
4)определить угловые скорость и ускорение переносного движения (пластины), скорость, вращательное и центростремительное ускорения переносного движения точки;
5)по известным угловой скорости переносного движения и относительной скорости точки найти ее кориолисово ускорение;
6)изобразить на чертеже векторы кинематических величин, определенных в предыдущих пунктах с учетом полученных знаков этих величин;
7)выбрать прямоугольную систему координат с началом в точке М, на осях которой будут определяться проекции относительной и переносной скоростей и ускорений и кориолисова ускорения точки;
8)применяя теорему сложения скоростей, определить абсолютную скорость точки, используя метод проекций или теорему косинусов;
9)применяя теорему сложения ускорений, определить абсолютное ускорение точки, используя метод проекций.
Учесть, что в уравнения проекций абсолютной скорости и ускорения точки должны подставляться абсолютные величины скоростей и ускорений относительного и переносного движения точки.
Рис. К2.0 |
Рис. К2.1 |
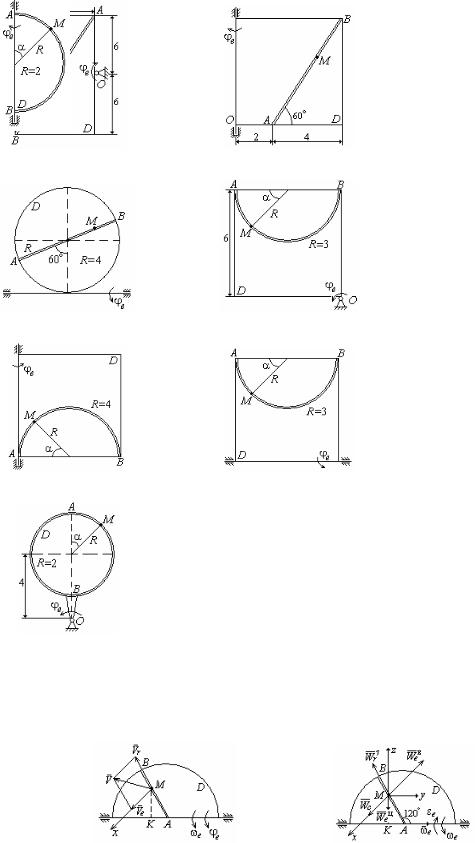
Рис. К2.2 |
Рис. К2.3 |
Рис. К2.4 |
Рис. К2.5 |
Рис. К2.6 |
Рис. К2.7 |
Рис. К2.8 |
Рис. К2.9 |
|
Пример решения задания К2 |
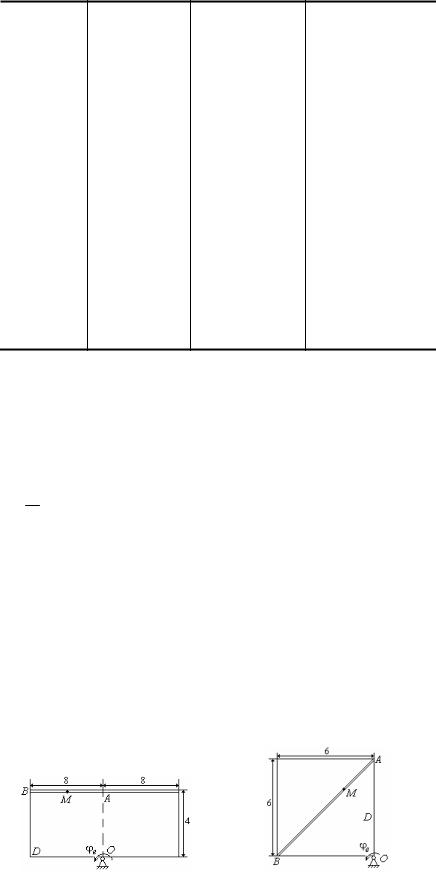
Решить задачу К2 (рис. К2, а, б) при следующих условиях:
ϕe = 2t2 −t3 рад, sr = AM = 2t3 +t2 +3 м.
а) |
б) |
Рис. К2
Решение
Точка М совершает сложное движение, состоящее из двух движений: относительного движения по прямой АВ и переносного движения по окружности радиуса МК.
Найдем положение точки М на теле D в момент времени t1 =1 с и определим радиус МК переносного вращения:

AM = s |
r |
= 2t3 |
+t1 |
+3 = 6 м, |
MK = AM sin 60D ≈ 5,1 м. |
||||||
|
1 |
1 |
|
|
|
|
|
|
|
||
Определяем скорости точки М. |
|
dsr |
|
|
|
|
|
|
|
||
Относительная скорость точки |
V = |
= 6t2 + 2t |
м/с. При |
t =1 |
с V |
|
|
|
|||
=8 м/с. Вектор V |
направлен по |
||||||||||
|
|||||||||||
|
|
r |
dt |
|
|
1 |
r |
|
r |
||
|
|
|
|
|
|
|
|
|
|
||
прямой АВ от точки А к точке В. Переносная скорость точки Ve = ωe MK .
Угловая скорость переносного движения
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dϕe |
= 4t −3t |
2 |
|
–1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωe |
= |
|
|
|
|
|
|
с , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
при |
t =1 |
с, |
ω |
e |
=1 с–1, |
V = 5,1 м/с. Так как ω > 0 , то тело D вращается в направлении положительного отсче- |
|||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
e |
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
та угла ϕe . Вектор Ve направлен перпендикулярно плоскости чертежа (по оси x к нам). |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Абсолютная скорость точки V |
=Vr +Ve . |
Так как Vr Ve , |
то модуль абсолютной скорости точки равен |
|||||||||||||||||||||||||||||||||||||||||||||||
V = |
V 2 +V |
2 ≈ 9,5 м/с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
r |
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Направление вектора V |
определяется диагональю параллелограмма, построенного на векторах Vr и Ve |
|||||||||||||||||||||||||||||||||||||||||||||||||
(рис. К1, а). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Абсолютное ускорение точки при сложном движении определяется формулой |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
τ + |
|
n + |
|
в + |
|
ц |
+ |
|
. |
(1) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
W |
W |
W |
W |
W |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r |
|
e |
|
e |
|
c |
|
|
|
|
|
|
|
|||||
|
Относительное касательное ускорение W |
τ = |
dVr |
=12t + 2 м/с. При |
t =1 |
с, W τ =14 |
м/с. Вектор |
|
τ на- |
||||||||||||||||||||||||||||||||||||||||||
|
W |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
r |
|
|
|
|
|
|
r |
||||||
правлен по АВ к точке В (рис. К1, б). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Относительное нормальное ускорение |
W n = |
|
r |
= 0 , так как для прямолинейного относительного движе- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ния ρ = ∞ .
Переносное вращательное ускорение Weв = εe MK . Угловое ускорение переносного движения
εe = ddωte = 4 −6t с–2,
при t1 =1 с εу = −2 с–2, Weв = −10,2 м/с2. Знак «–» означает, что вектор Weв направлен противоположно векто-
ру переносной скорости Ve .
Переносное центростремительное ускорение
Weц = ωe2 MK = 5,1 м/с2.
Вектор Weц направлен по радиусу МK к точке K. Вектор кориолисова ускорения Wc = 2[ωe ×Vr ]. Модуль кориолисова ускорения точки равен
Wc = 2ωeVr sin (ωe ,Vr )= 2ωeVr sin120D ≈13,9 м/с2.
Вектор Wc направлен по оси к нам согласно правилу Жуковского (или правилу векторного произведения).
Модуль абсолютного ускорения точки найдем методом проекций. Спроектируем векторное равенство (1) на оси прямоугольной системы координат x, y, z с началом в точке М:
Wx =Wc − Weв = 3,7 м/с2;
Wy = −Wrτ cos 60D = −7 м/с2;
W |
z |
= |
W τ |
cos 30D −W ц = 7 м/с2. |
|
|
r |
e |
По проекциям определяем модуль абсолютного ускорения точки М
W =  Wx2 +Wy2 +Wz2 ≈10,6 м/с2.
Wx2 +Wy2 +Wz2 ≈10,6 м/с2.
Ответ: V = 9,5 м/с, W =10,6 м/с2.
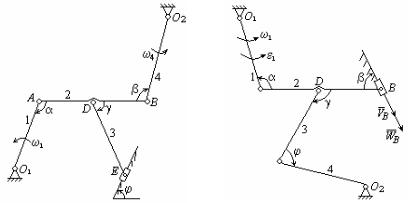
Задание К3 КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО МЕХАНИЗМА
Плоский механизм состоит из четырех стержней и ползуна, соединенных между собой и с опорами шарнирами (рис. К3.0, К3.1). На рис. К3.0 угловые скорости ω1 (или ω4 ) постоянны, а стержни АВ горизонтальны
на обоих рисунках, причем AD = DB. В табл. К3 приведены данные величины для двух рисунков, при этом l1 = 0,4 м, l2 =1,2 м, l3 =1,4 м, l4 = 0,6 м.
В результате решения задачи должны быть найдены, кроме заданных в условии: скорости точек A, B, C, D, E; угловые скорости ω1, ω2, ω3, ω4; ускорения точек А и В; угловые ускорения ε1, ε2, ε4 (для рис. К3.0) и ε1, ε2 (для рис. К3.1). Рис. К3.0 соответствует предпоследней цифре шифра 0 – 4; рис. К3.1 для предпоследней цифры 5 – 9; номер условия выбирается по табл. К3 согласно последней цифре шифра.
|
|
Рис. К3.0 |
|
|
|
|
Рис. К3.1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица К3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер |
|
Углы, град |
|
Рис. К3.0 |
|
Рис. К3.1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω1, |
ω4, |
ω1, |
ε1, |
VB, |
WB, |
||
|
условия |
α |
β |
γ |
ϕ |
|||||||
|
|
с–1 |
с–1 |
с–1 |
с–2 |
м/с |
м/с2 |
|
||||
|
0 |
30 |
120 |
60 |
0 |
2 |
– |
2 |
1 |
– |
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
60 |
90 |
30 |
90 |
4 |
– |
– |
– |
2 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
90 |
60 |
90 |
60 |
– |
5 |
5 |
2 |
– |
– |
|
|
3 |
120 |
30 |
60 |
0 |
– |
3 |
– |
– |
6 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
150 |
60 |
30 |
90 |
3 |
– |
1 |
2 |
– |
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
90 |
120 |
90 |
60 |
6 |
– |
– |
– |
10 |
1 |
|
|
6 |
120 |
90 |
60 |
0 |
– |
2 |
10 |
3 |
– |
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
150 |
270 |
30 |
90 |
5 |
– |
– |
– |
8 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
60 |
120 |
90 |
60 |
– |
4 |
6 |
4 |
– |
– |
|
|
9 |
210 |
90 |
60 |
0 |
– |
6 |
– |
– |
12 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Методические указания
При выполнении задания К3 необходимо изучить тему «Плоскопараллельное движение твердого тела», при этом рекомендуется разобрать пример решения и решить самостоятельно следующие задачи: [1, т. 1 – 6.4, 6.10, 6.17, 6.20]; [6 – К3, К4]; [5 – 16.22, 16.33, 16.37, 18.11, 18.23].
При решении задания рекомендуется придерживаться следующей последовательности действий:
1)на чертеже изобразить механизм в том положении, в котором требуется определить его кинематические характеристики;
2)по данным задачи следует определить модуль и направление скорости одной точки звена механизма и направление скорости другой точки этого же звена;
3)определить линейные скорости точек звеньев механизма и их угловые скорости, используя теорему о проекциях скоростей двух точек или понятие мгновенного центра скоростей этого звена;
4)найти, если оно не задано по условию задачи, ускорение какой-нибудь точки звена, принимая ее в дальнейшем за полюс; при этом, если точка движется по окружности, то ее ускорение представить геометрической суммой вращательного и центростремительного ускорений;
5)записать векторное равенство, являющееся аналитическим выражением теоремы об ускорениях точек тела при плоскопараллельном движении; при этом одна точка является полюсом, а другая – точкой, ускорение которой надо найти;
6)представить ускорение точки геометрической суммой вращательного и центростремительного, если точка, ускорение которой определяется, движется по окружности;
7)проектируя обе части векторного равенства относительно ускорений указанных точек на прямую, проходящую через точки, и на прямую, перпендикулярную к ней, найти требуемое ускорение точки и вращательное ее ускорение по отношению к полюсу;
8)определить требуемые угловые ускорения звеньев механизма.
Следует помнить, что в механизме, состоящем из нескольких звеньев, каждое звено, совершающее плоскопараллельное движение, имеет свой мгновенный центр скоростей и свою угловую скорость в данный момент времени.
|
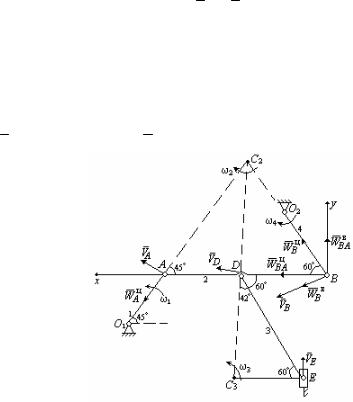
Пример решения задания К3 |
|
Для |
плоского механизма, указанного на рис. |
К3: AO1x = 45°, ABO2 =60°, BDE =60°, |
AD = DB, |
ω1 = 4 с–1, l1 = 0,6 м, l2 = 1,4 м, l3 = 1,6 м, l4 = 0,8 |
м. |
Определить: VA , VB , VD , ω2 , ω3 , ω4 , WA , WB , ε2 , ε4 . .
Решение
Покажем на рисунке направления скоростей всех указанных точек согласно наложенным связям и найдем мгновенные центры скоростей C2 и C3 звеньев 2 и 3 соответственно. Векторы скоростей точек А и В перпен-
дикулярны соответственно O1 A и O2 B и направлены в соответствие с угловыми скоростями звеньев 1 и 4 механизма. Вычисляем скорость точки А
VA = ω1 O1 A = 2,4 м/с.
Восстанавливая перпендикуляры к векторам VA и VB в точках А и В до их пересечения, получим точку C2 – мгновенный центр скоростей звена 2. Так как точка C2 – мгновенный центр скоростей, то имеет место соотношение
|
|
|
VA |
= |
VB |
= |
V D |
= ω2 . |
(1) |
|
|
|
|
BC2 |
|
||||
|
|
|
AC2 |
|
DC2 |
|
|||
Направление скорости VA позволяет показать направление угловой скорости ω2 |
звена 2, что определяет |
||||||||
вектор скорости VD точки D этого звена (VD C2 D).
Рис. К3
Учитывая, что скорость точки Е направлена по прямой, по которой перемещается ползун, построим мгновенный центр скоростей звена 3. Так как точка C3 – мгновенный центр скоростей звена 3, то имеет место соот-
ношение
VD |
= |
VE |
= ω . |
(2) |
|
|
|||
DC3 |
|
3 |
|
|
|
EC3 |
|
||
Найдем необходимые линейные размеры на рис. К2. По теореме синусов и косинусов из ∆ABC2 , ∆AC2 D и ∆DEC3 определяем
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AC |
|
|
|
|
|
|
|
BC |
|
|
|
|
|
|
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
= |
2 |
|
|
= |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 60D |
sin 45D |
sin 75D |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AC2 |
= |
|
AB sin 60D |
|
≈1,26 м; |
|
BC2 |
= |
|
|
AB sin 45D |
|
≈1,02 |
м; |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
sin 75D |
|
|
|
|
|
|
|
sin 75D |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
DC2 = |
|
AC22 + AD2 −2AC2 AD cos 45D ≈ 0,91 м; |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
AC |
2 |
|
|
|
|
|
|
|
DC |
2 |
|
|
|
|
|
|
|
sin ADC2 |
|
|
|
|
|
AC |
2 |
|
sin 45D |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
= 0,979 ; |
|
|
|
|||||||||||||||||||||
|
sin ADC2 |
sin 45D |
|
|
|
|
|
|
|
|
|
|
DC2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
ADC2 =180D −78D =102D; |
|
EDC3 =102D −60D = 42D; |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DC |
|
|
|
|
|
|
|
EC |
|
|
|
|
|
|
|
|
DE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
= |
3 |
|
= |
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
sin 60D |
sin 42D |
sin102D |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
EC3 |
= |
DE sin 42D |
|
≈1,09 м; |
|
DC3 |
= |
|
DE sin 60D |
|
|
≈1,42 |
м. |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
sin102D |
|
|
|
|
|
|
sin102D |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Теперь вычисляем линейные и угловые скорости из соотношений (1) и (2) |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
VA |
|
|
|
|
|
|
|
–1 |
|
|
|
VB = ω2 BC2 ≈1,94 м/с; |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
ω2 |
= |
|
|
|
|
|
|
|
|
|
≈1,9 |
|
с |
|
; |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
AC2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
VD = ω2 |
DC2 ≈1,73 м/с; |
|
|
|
|
|
|
|
|
|
|
|
|
VB |
|
|
|
|
|
|
|
–1 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
ω4 |
|
= |
|
|
|
|
|
|
|
|
≈ 2,43 с ; |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
BO2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
ω = |
|
|
VD |
|
|
|
|
≈1,22 |
|
|
с |
–1 |
; |
V |
E |
= ω |
3 |
|
EC |
3 |
|
≈1,33 м/с. |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
3 |
|
|
DC3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Определим ускорения точек А и В и угловые ускорения звеньев 2 и 4. |
|
|
|
|
|
|
|
в = 0 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Так как угловая скорость ω |
|
постоянна, то вращательное ускорение точки А |
|
W |
и |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
||||
|
|
|
|
|
|
|
|
|
|
|
W |
A |
=W ц |
= ω2 |
O A = 9,6 м/с2. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Вектор центростремительного ускорения точки А направлен от точки А к точке O1 . |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ускорение точки В выражаем через ускорение точки А, принимая ее за полюс |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WBц + |
WBв = |
WAц + |
|
BAц |
+ |
|
BAв , |
(3) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WB = |
W |
W |
|||||||||||||||||||||||||||
где WBAц , WBAв – соответственно центростремительное и вращательное ускорения точки В относительно точки
А.
Покажем на рисунке все векторы в равенстве (3), выбрав направления векторов WBв и WBAв произвольно (WBв WBц, WBAв WBAц ), и спроектируем равенство (3) на оси Bx , By
|
|
|
Bx : WBв cos 30D +WBц cos 60D =WAц cos 45D +WBAц ; |
(4) |
|
|
|
|
By : WBц cos 60D −WBв cos 30D = −WAц sin 45D +WBAв , |
(5) |
|
где WBц = ω42 l4 = 4,72 м/с2, WBAц = ω22 l2 = 5,05 м/с2. |
|
|
|||
Вращательное ускорение точки В находим из уравнения (4) |
|
|
|||
в |
|
WAц cos 45D +WBAц −WBц cos 60D |
2 |
|
|
WB |
= |
|
|
≈10,9 м/с ; |
|
cos 30D
WB =  (WBц )2 +(WBв )2 ≈11,9 м/с2.
(WBц )2 +(WBв )2 ≈11,9 м/с2.
Из уравнения (5) определяем
WBAв =WBц sin 60D −WBв sin 30D +WAц sin 45D ≈ 6,43 м/с2;