

Курсовые задания
.pdfплоскостям происходит без скольжения. В указанном столбце таблицы обозначено: V1 , V2 , V3 , V5 – линейные скорости тел 1, 2, 3 и центра масс тела 5; ω4 , ω5 , ω6 – угловые скорости тел 4, 5, 6.
При расчетах принять радиусы ступеней ступенчатого шкива, блока, катка и их радиусы инерции относительно осей, перпендикулярных к плоскости движения и проходящих через центры масс этих тел, равными
R4 = 0,3 м; r4 = 0,1 м; ρ4 = 0,2 м; R5 = 0,5 м; r5 = 0,3 м; ρ5 = 0,4 м; R6 = 0,4 м; r6 = 0,2 м; ρ6 = 0,3 м.
Коэффициент трения грузов о плоскость f = 0,15, ползун перемещается по направляющей без трения. При решении задачи учесть, что если сила F постоянна, то она составляет заданный угол α с направлени-
ем движения тела, на который действует; если сила F переменна, то этот угол равен нулю.
Методические указания
Перед выполнением задания Д3 необходимо изучить тему «Кинетическая энергия материальной системы. Работа и мощность силы»; при этом рекомендуется разобрать пример решения и решить самостоятельно сле-
дующие задачи: [1, т. 2 – 9.101, 9.102, 9.103]; [6 – Д10]; [5 – 38.30, 38.35, 38.42, 38.44].
Рис. Д3.0
Рис. Д3.1
Рис. Д3.2
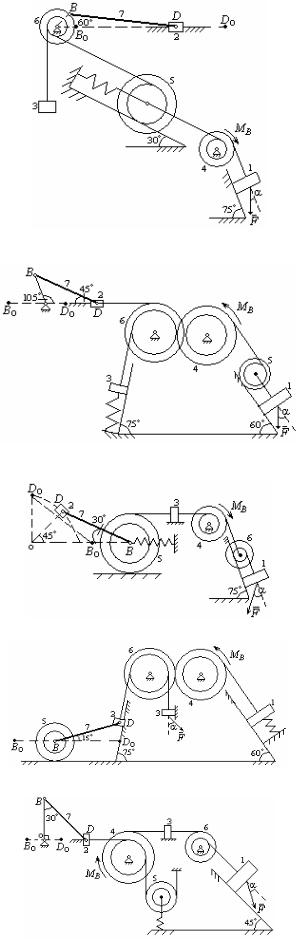
Рис. Д3.3
Рис. Д3.4
Рис. Д3.5
Рис. Д3.6
Рис. Д3.7

Рис. Д3.8
Рис. Д3.9
Решение задания целесообразно проводить в следующей последовательности:
1)установить, какой вид движения совершают тела материальной системы и записать соответствующие формулы для кинетической энергии каждого тела;
2)изобразить на чертеже векторы линейных скоростей и показать угловые скорости тел;
3)выразить линейные скорости, угловые скорости и кинетическую энергию тел через скорость, подлежащую определению;
4)записать кинетическую энергию системы в конечном положении как сумму кинетических энергий тел этой системы;
5)изобразить на чертеже все внешние силы и пары сил, действующие на тела системы;
6)определить перемещения (линейные и угловые) тел системы при ее переходе из начального положения
вконечное, используя то, что соотношение между перемещениями такое же, как и между соответствующими скоростями;
7)найти сумму работ внешних сил и пар сил на соответствующих перемещениях тел системы;
8)приравняв кинетическую энергию системы сумме работ внешних сил, определить требуемую величи-
ну.
При определении зависимости между скоростью центра масс тела, движущегося плоскопараллельно, и его угловой скоростью необходимо использовать известное из кинематики понятие о мгновенном центре скоростей тела.
При вычислении работы сил учесть равенство работы нулю в случаях, если сила перпендикулярна перемещению точки ее приложения и сила приложена в неподвижной точке или в точке, являющейся мгновенным центром скоростей.
Соотношение между скоростями точек B и D кривошипа BD может быть установлено с помощью теоремы о равенстве проекций скоростей этих точек на прямую BD.
При определении угловой скорости ω и линейной скорости Vc центра масс кривошипа BD могут быть использованы формулы
|
|
ω = |
VD |
|
sin(β± γ) |
|
|
= |
VB |
|
sin(β± γ) |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
BD cosβ |
|
|
BD cos γ |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
V 2 |
= |
VD2 |
[cos2 γ + cos2 β + 2 cos γ cosβ cos(β ± γ)]= |
||||||||||||||||||||||||
|
|||||||||||||||||||||||||||
c |
|
|
|
|
|
4 cos2 β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
= |
VB2 [cos2 γ + cos2 β + 2 cos γ cosβ cos(β ± γ)] |
, |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
4 cos2 γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
где VD , VB – скорости точек D и B; γ, β – острые углы, которые образуют векторы VD , VB с прямой, проходя- |
|||||||||||||||||||||||||||
щей через точки B и D. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В указанных формулах для ω и Vc |
берется знак минус в случае, если проекции скоростей VD , VB на пря- |
||||||||||||||||||||||||||
мую, перпендикулярную BD, имеют одинаковые знаки; знак плюс, если проекции отличаются знаками.
Пример решения задания Д3
Движение механической системы, состоящей из тел 1 – 7, начинается из состояния покоя, в котором кривошип 7 занимает положение В0 D0 и деформация пружины равна нулю, под действием переменной силы F1 ,
являющейся функцией перемещения точки ее приложения, постоянной силы F2 и пары сил с переменным моментом M B , зависящим от угла поворота шкива 4. Найти скорость тела 2 в конечном положении системы, которое указано на рис. Д3.
|
|
Дано: |
|
|
|
|
Рис. Д3 |
|
|
|
|
||||
|
|
m1 = 8 кг; m2 =1 кг; m3 = 2 |
|
кг; |
m4 = 4 кг; |
m5 = 3 кг; |
m6 = 2 кг; |
m7 = 4 кг; R4 = 0,2 м; r4 = 0,1 |
|||||||
м; |
R |
|
= 0,15 м; R |
= 0,1 м; r = 0,07 м; ρ |
4 |
= r4 |
2 м; |
ρ |
5 |
= R5 2 м; |
ρ |
6 |
= r6 3 |
м; l =1,17 м; c =120 Н/м; f = |
|
|
5 |
|
6 |
6 |
|
2 |
|
2 |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0,1; |
F1 =180 +380 |
s Н; M B = 70 + 20ϕ Н м; F2 =100 Н. |
|
|
|
|
|||||||||
|
|
Определить: V2 – скорость тела 2 в конечном положении механической системы. |
|||||||||||||
Решение
При решении задания применим теорему об изменении кинетической энергии механической системы:
T −T0 = ∑Ake +∑Aki , |
(1) |
где T0 , T – кинетическая энергия системы соответственно в начальном и конечном ее положениях; ∑Ake |
– |
сумма работ внешних сил, действующих на систему, на перемещении системы из начального положения в конечное; ∑Aki – сумма работ на том же перемещении системы внутренних сил.
Для механической системы, состоящей из абсолютно твердых тел, которые соединены нерастяжимыми
нитями, и находящейся в начальном положении в состоянии покоя ∑Aki |
|
= 0 , T0 = 0 |
. Поэтому уравнение (1) |
|||||||||||||||||||||||||||||||||
записывается в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T = ∑Ake . |
(2) |
||||||||||||||||||||||
Изображаем действующие на систему внешние силы: активные – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
F1, |
F2 , Fупр, P1, |
P2 , P3 , P4 , P5 , P6 , P7 , па- |
||||||||||||||||||||||||||||||||||
ра сил с моментом M B и реакции связей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
N1, N2 , N3 , N4 , S , Fтр1, Fтр 2 ; показываем направления линейных и |
||||||||||||||||||||||||||||||||||||
угловых скоростей тел системы.
Находим угол γ, определяющий положение кривошипа ВD в конечном положении системы:
R + R |
|
|
l |
|
(R |
+ R |
4 |
)sin120D |
≈ 0,259 , γ ≈15D |
, ψ = 45D. |
5 |
4 |
= |
|
, sin γ = |
5 |
|
|
|||
sin γ |
|
sin120D |
|
|
|
l |
||||
|
|
|
|
|
|
|
|
Определим кинетическую энергию системы, которая равна сумме кинетических энергий тел системы
T =T1 +T2 +T3 +T4 +T5 +T6 +T7 . |
(3) |
Тела 1, 2, 3 совершают поступательное движение; тело 4 – вращательное; тела 5, 6, 7 – плоскопараллельное. Формулы для кинетических энергий тел системы имеют вид
|
|
T = |
|
1 |
m V 2 ; |
|
T = |
|
1 |
m V 2 ; |
|
T = |
1 |
m V 2 |
; |
T = |
|
1 |
I |
|
ω2 ; |
|
|
|
|
||||||||||||||||||
|
|
2 |
|
2 |
|
2 |
2 |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
1 |
|
1 |
1 |
|
|
|
2 |
|
2 |
2 |
|
|
3 |
|
|
3 |
3 |
|
|
4 |
|
|
4 |
|
4 |
|
|
|
|
|
|||||||||||
T = |
1 |
m V 2 |
+ |
|
1 |
J |
|
ω2 |
; |
T = |
1 |
m V 2 |
+ |
|
1 |
J |
|
ω2 |
; |
|
T = |
1 |
m V 2 |
+ |
|
1 |
|
J |
|
ω2 |
, |
||||||||||||
|
2 |
|
2 |
2 |
|
|
2 |
2 |
|
|
|||||||||||||||||||||||||||||||||
5 |
2 |
5 |
5 |
|
|
5 |
5 |
|
|
6 |
|
6 |
6 |
|
|
6 |
6 |
|
|
7 |
|
|
7 |
7 |
|
|
|
|
7 |
7 |
|
||||||||||||
где J4 , J5 , J6 , J7 – моменты инерции соответствующих тел относительно осей, проходящих через центр масс тел, перпендикулярно к плоскости движения; V5 , V6 , V7 – скорости центров масс тел; ω4 , ω5 , ω6 , ω7 – угловые скорости тел.
J |
4 |
= m |
ρ2 , |
J |
5 |
= m ρ2 , |
J |
6 |
= m ρ2 , |
J |
7 |
= |
ml 2 |
. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||||||||||||||
|
4 |
4 |
|
5 |
5 |
|
6 |
6 |
|
12 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Линейные и угловые скорости необходимо выразить через скорость V2 тела 2. |
|
|
|
|
|
|
||||||||||||||||
Скорость V центра масс тела 6 равна V |
2 |
, а угловая скорость этого тела равна ω |
6 |
= |
V6 |
= |
V2 |
, так как точ- |
||||||||||||||
|
|
|||||||||||||||||||||
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R6 |
|
R6 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ка K6 является мгновенным центром скоростей этого тела.
Скорость точки А равна: VA =V3 = 2V6 = 2V2 . Проекции скоростей точек D и В на прямую DВ равны
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V3 cos γ =V5 cos (90D −ψ); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
cos15D |
|
|
|
2V |
2 |
cos15D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
V = |
|
|
|
3 |
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos 45D |
|
|
|
|
|
cos 45D |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
2V |
2 |
cos 15D |
|
|||
Так как точка K |
|
– мгновенный центр скоростей тела 5, то ω |
|
= |
|
5 |
|
= |
|
|
|
|
|
. |
||||||||||||||||||||||||||||||||||||
5 |
5 |
R |
|
R cos 45D |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos15D |
|
|
|
5 |
|
|
|
5 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
2V |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Угловая скорость тела 4 равна ω4 = |
|
|
5 |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
R + R |
4 |
|
(R + R ) cos 45D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
5 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2V |
r cos15D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Скорость тела 1 V1 = ω4r4 = |
|
|
|
2 |
4 |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(R + R |
4 |
)cos 45D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Векторы скоростей точек В и D кривошипа образуют с прямой, проходящей через эти точки, соответст- |
||||||||||||||||||||||||||||||||||||||||||||||||||
венно углы β = 45°, γ = 15°, и проекции скоростей этих точек на прямую, перпендикулярную ВD, имеют одина- |
||||||||||||||||||||||||||||||||||||||||||||||||||
ковые знаки. Поэтому угловая скорость ω7 и линейная скорость центра масс V7 |
кривошипа могут быть опре- |
|||||||||||||||||||||||||||||||||||||||||||||||||
делены по формулам |
|
|
|
|
|
|
|
|
|
|
|
|
|
V3 sin (45D −15D) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2V2 sin 30D |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ω7 = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l cos 45D |
|
|
|
|
|
|
|
l cos 45D |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
V 2 = V32 (cos2 15D +cos2 45D +2 cos15Dcos 45Dcos (45D −15D))= |
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 cos2 45D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
= |
V22 (cos2 15D +cos2 45D +2 cos15Dcos 45Dcos (45D −15D)) |
. |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos2 |
45D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Кинетическая энергия системы в соответствии с равенством (3) равна |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T = |
1 |
m V 2 , |
|
|
|
(4) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пр 2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4m r |
2 cos2 |
15D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4m |
ρ2 cos2 |
15D |
|
|
|
|
|
|
|
||||||||||||||||||
|
mпр = |
|
|
1 4 |
|
|
|
|
|
|
|
|
+ m2 |
+4m3 + |
|
|
|
|
4 |
|
4 |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
||||||||||||||||
|
(R |
+ R |
4 |
)2 cos2 45D |
(R |
+ R |
4 |
)2 cos2 45D |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
2 |
15 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
+ |
4m5 (1+ρ5 |
/ R5 )cos |
|
|
|
|
+ m |
1 |
+ |
|
ρ6 |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
cos2 45D |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+m |
|
cos2 |
15D +cos2 |
45D + 2 cos15Dcos 45Dcos 30D |
+ m |
|
sin 2 |
30D |
; |
|
7 |
|
|
cos2 45D |
7 3cos |
2 |
45D |
||||
|
|
|
|
|
||||||

mпр ≈ 73,13 кг – приведенная масса механической системы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Определим сумму работ всех внешних сил при перемещении системы из положения, в котором кривошип |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7 занимал положение В0 D0 , указанное на рис. Д3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
Работа сил |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равна ну- |
|||||||||||||||||||||||||||||||||
|
|
|
P4 , N4 равна нулю, так как точки приложения этих сил неподвижны; работа силы S |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
лю, так как точка приложения этой |
силы |
|
является |
|
мгновенным центром скоростей тела 6; работа сил |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
равна нулю, потому что каждая из этих сил перпендикулярна к перемещению ее точки приложе- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
N1, N2 , N3 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ния. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Расчетные формулы для работы остальных сил и момента M B имеют вид |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
|
|
)= m gs |
|
|
sin 60D; |
|
|
|
|
|
A( |
|
|
|
)= −F |
s ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тр1 |
|
|
|
|
|
|
|
тр1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
F1 )= s∫1 (180 +380 |
s )ds =180s1 +760s1 |
s1 / 3 ; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A(M B )= ∫ |
(70 +20ϕ)dϕ = 70ϕ4 +10ϕ42 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
|
)= −m |
|
|
gh ; |
|
A( |
|
|
|
|
|
|
)= −F |
|
|
h ; |
|
|
|
A( |
|
|
)= −F h cos 30D; |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
2 |
|
F |
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
тр 2 |
|
|
|
|
|
|
тр 2 2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
2 2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A( |
P3 )= −m3 gh3 ; |
|
|
|
|
|
|
A( |
P5 )= −m5 gh5 ; |
|
|
|
|
|
A( |
P6 )= −m6 gh6 ; |
A( |
P7 )= −m7 gh7 ; |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
|
упр)= |
с |
|
(x02 − x12 ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
s1 |
– перемещение груза 1; |
h2 , |
|
h3 , h5 , |
h6 , |
h7 |
|
– вертикальные перемещения точек приложения сил тяжести |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
соответствующих тел; ϕ4 – угол поворота тела 4; x0 , |
x1 |
|
– соответственно начальная и конечная деформации |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
пружины (x0 = 0); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
= fN |
1 |
|
= fm g cos 60D; |
|
|
|
|
F |
|
|
|
= fN |
2 |
|
= fF cos 60D . |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тр1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тр 2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
В соответствии с рис. Д2 |
h |
|
= ОD −ОD = l + R |
|
+ R |
|
− |
|
l sin ψ |
|
|
|
≈ 0,13 м. Так как |
V =V |
|
= 2V |
|
|
= 2V , то |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
sin120D |
|
|
|
A |
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
6 |
||||||||||||||
|
|
|
|
|
|
|
h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
h |
= h |
= |
= 0,065 м. Деформацию пружины x |
|
определим из равенства |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
2 |
6 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h3 (R6 +r6 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
= |
h6 |
|
, |
|
|
x |
|
= |
|
≈ 0,11 м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R6 +r6 |
|
|
|
|
R6 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2R6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
Вертикальное перемещение центра масс тела 5 равно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
= R + R |
4 |
|
+(R + R |
4 |
)sin 30D = 0,53 м; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
центра масс тела 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В D |
|
|
|
|
|
|
|
|
|
|
|
|
|
ВD cos γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
= R |
+ R |
4 |
+ |
|
|
|
|
|
0 0 |
− |
|
ОD − |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l sin 45D |
|
|
|
|
|
|
1+cos15D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= R |
+ R |
|
− |
|
|
|
|
|
|
|
|
|
|
|
+l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0,55 м. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
sin120 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Угол поворота тела 4 равен ϕ = |
2π |
= 2,09 рад, перемещение тела 1 s |
= ϕ |
4 |
r = |
2πr4 |
= 0,21 м. |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
4 |
|
3 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Сумма работ внешних сил системы равна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
Ae |
= m gs (sin 60D − f cos 60D)+(180 +760 |
|
|
s |
|
|
/ 3)s |
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
∑ k |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
−(m2 g + fF2 cos 60D + F2 cos30D)h2 −m3 gh3 + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+10 (7 +ϕ |
4 |
)ϕ |
4 |
−m gh −m gh |
|
−m gh |
−cx |
2 / 2 ≈ 216,36 Дж. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
5 |
|
|
|
|
6 |
|
|
|
6 |
|
|
|
|
7 |
|
|
7 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
С учетом равенств (4) и (5) для определения скорости V2 |
|
|
получим уравнение |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
mпрV22 = ∑Ake . |
|
|
|
|
|
|
|
(6) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из уравнения (6) следует, что V2 = |
2∑Ake |
= 2,43 м/c. |
|
|
mпр |
Ответ: V2 = 2,43 м/c. |
|
Задание Д4
ПРИМЕНЕНИЕ ПРИНЦИПА ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ К РЕШЕНИЮ ЗАДАЧ О РАВНОВЕСИИ СИЛ, ПРИЛОЖЕННЫХ К МЕХАНИЧЕСКОЙ СИСТЕМЕ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
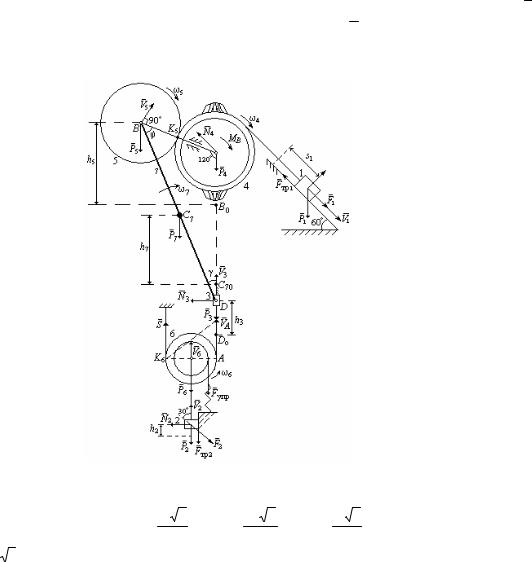
Конструкция, состоящая из невесомых стержней 1, 2, 3 и однородного стержня 4, соединенных шарнирами, невесомого ползуна С и пружины, расположена в вертикальной плоскости и находится в равновесии в положении, определяемом углами α и β (рис. Д4.0 –Д4.9).
На рис. Д4.0 – Д4.4 ползун С закреплен шарнирно на стержне 3; на рис. Д4.5, Д4.8, Д4.9 – на стержне 2; на рис. Д4.6 и Д4.7 – на стержне 4.
На конструкцию, кроме силы тяжести стержня 4 и силы упругости пружины, действуют пары сил с заданными моментами.
Определить деформацию λ пружины, коэффициент жесткости которой равен с, в равновесном положении указанной конструкции.
На всех рисунках точка С является серединой соответствующего стержня. Длины стержней равны l1 = O1A = l; l2 = O2B = 2l; l3 = O3C = 3l; l4 = AB = 4l, масса стержня 4 пропорциональна его длине: m = kl4 , где k = 5 кг/м.
Рис. Д4.0 |
Рис. Д4.1 |
Рис. Д4.2 |
Рис. Д4.3 |
Рис. Д4.4 |
Рис. Д4.5 |
Рис. Д4.6 |
Рис. Д4.7 |

Рис. Д4.8 |
Рис. Д4.9 |
Необходимые для решения задачи исходные данные приведены в табл. Д4.
Методические указания
Перед выполнением задания Д4 необходимо изучить тему «Принцип возможных перемещений», при этом рекомендуется разобрать пример решения и решить самостоятельно следующие задачи: [1, т. 2 – 10.14, 10.20, 10.22]; [6 – Д14]; [5 – 46.14, 46.16, 46.17].
Решение задачи целесообразно проводить в следующей последовательности:
1)построить чертеж в соответствии с заданными углами и соотношениями между длинами стержней;
2)показать на рисунке все действующие на материальную систему активные силы, считая пружину или сжатой, или растянутой;
3)сообщить системе возможное перемещение и показать векторы элементарных линейных перемещений точек приложения сил и углы элементарных поворотов тел;
4)выразить указанные возможные перемещения через одно, что возможно в случае материальной системы с одной степенью свободы;
5)вычислив сумму работ активных сил на соответствующих возможных перемещениях их точек приложения, приравнять ее нулю;
6)заменить в полученном уравнении возможные перемещения через одно выбранное и определить требуемую величину;
7)найти деформацию пружины как отношение модуля ее силы упругости к коэффициенту жесткости. Учесть, что при определении элементарной работы силы, действующей на тело, возможным перемещени-
ем которого является угол поворота, надо момент силы относительно центра поворота умножить на этот угол. При установлении зависимости между величинами элементарных перемещений точек тела может быть использована теорема о равенстве проекций этих перемещений на прямую, проходящую через эти точки.
Таблица Д4
|
Номер |
Углы, град |
|
|
Моменты пар сил, Н м |
|||
|
|
|
l, м |
с, Н/см |
||||
|
|
|||||||
|
условия |
α |
β |
|
|
|
||
|
|
|
М1 |
М2 |
М3 |
|||
|
|
|
|
|
|
|||
0 |
15 |
30 |
0,6 |
320 |
160 |
0 |
200 |
|
|
|
|
|
|
|
|
|
|
1 |
45 |
60 |
0,4 |
280 |
0 |
180 |
240 |
|
2 |
30 |
15 |
0,5 |
240 |
260 |
140 |
0 |
|
|
|
|
|
|
|
|
|
|
3 |
60 |
75 |
0,6 |
360 |
280 |
0 |
210 |
|
|
|
|
|
|
|
|
|
|
4 |
45 |
60 |
0,5 |
400 |
0 |
170 |
250 |
|
5 |
75 |
30 |
0,4 |
340 |
230 |
290 |
0 |
|
|
|
|
|
|
|
|
|
|
6 |
15 |
45 |
0,6 |
380 |
150 |
0 |
300 |
|
|
|
|
|
|
|
|
|
|
7 |
30 |
75 |
0,5 |
300 |
0 |
220 |
180 |
|
8 |
60 |
15 |
0,4 |
260 |
190 |
270 |
0 |
|
|
|
|
|
|
|
|
|
|
9 |
75 |
45 |
0,5 |
420 |
300 |
0 |
140 |
|
|
|
|
|
|
|
|
|
|
Пример решения задания Д4
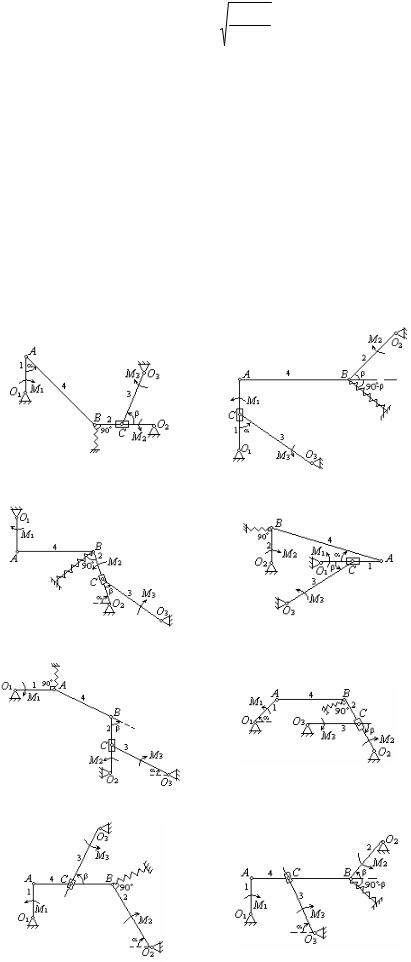
На механизм, расположенный в вертикальной плоскости, действуют заданная сила F , сила тяжести однородного стержня 4, сила упругости пружины с коэффициентом жесткости с, и пары сил с заданными моментами M1, M 2 , M 3 (рис. Д4). Невесомые стержни 1, 2, 3 и однородный стержень 4 массы m соединены друг с дру-
гом и опорами O1, O2 , O3 шарнирами.

Рис. Д4
Точки D и C являются серединами соответственно отрезков O3C и АВ, а O2 K = 2BK .
В положении, определяемом углами α, β, γ, механизм находится в равновесии. Найти деформацию пружины в указанном положении механизма.
Дано: α = 30°, β = 75 °, γ = 15°, ϕ = 60°, l1 = l = 0,4 м, l2 = 1,5l, l3 = 2l, l4 = 2,5l, АС = СВ, m = 10 кг, F = 200
Н, М1 = 320 Н м, М2 = 180 Н м, М3 = 60 Н м, с = 470 Н/см.
Определить: величину деформации λ пружины в положении равновесия.
Решение
Применим принцип возможных перемещений, в соответствии с которым сумма элементарных работ активных сил системы на возможных перемещениях их точек приложения равна нулю.
Уравнение возможных работ
∑δAk = 0 . |
(1) |
Показываем действующие на механизм активные силы F , P, Fy , предполагая, что пружина сжата, и пары сил с моментами M1, M 2 , M 3 .
Сообщим механизму возможное перемещение, при котором стержень 1 повернется на угол δϕ1 вокруг оси O1 . Выразим возможные линейные перемещения точек A, B, C и угловые перемещения стержней 2, 3 через угол δϕ1 . Это возможно сделать, так как рассматриваемый механизм имеет одну степень свободы. Учитываем,
что зависимость между возможными перемещениями сохраняется в таком же виде, что и для скоростей, соответствующих этим перемещениям.
Возможное перемещение δS A точки А перпендикулярно O1 A и его направление определяется направлением δϕ1 , при этом оно равно
|
|
|
|
|
|
|
|
δSA = l1 δϕ1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определяем возможное перемещение δ |
|
B точки В, учитывая, что δ |
|
B |
перпендикулярно O2 B и проекции |
|||||||||||||
S |
S |
|||||||||||||||||||
δ |
|
A и δ |
|
B на прямую АВ равны |
|
|
|
|
|
|
|
|
|
|
|
|
||||
S |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
δSB cos ψ = δS A cos (90D −α) , |
|
(2) |
||||||||||
где ψ = α +β−90D =15D . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Тогда перемещение δ |
|
B равно |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
δS |
A |
cos 60D |
|
l |
δϕ |
cos 60D |
|
|
||
|
|
|
|
|
|
|
|
δSB |
= |
|
|
|
|
= |
1 |
1 |
|
. |
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos15D |
|||||||
|
|
|
|
|
|
|
|
|
|
cos15D |
|
|
|
|
||||||
|
|
Построим мгновенный центр поворота стержня 4, которым является точка C4 |
пересечения перпендикуля- |
|||||||||||||||||
ров к δS A и δSB , восстановленных из точек А и В; при этом направление поворота стержня 4 вокруг точки C4 определяется направлениями δS A или δSB .
Возможное перемещение δSC точки С стержня 4 (или все равно, что ползуна, так как он шарнирно связан в этой точке с этим стержнем) перпендикулярно отрезку CC4 и направлено в соответствии с угловым перемещением δϕ4 .
Выразим через длину стержня 4 сторону C4 B треугольника AC4 B :
C4 B |
= |
AB |
; |
C4 B = |
AB sin α |
. |
sin α |
sin β |
|
||||
|
|
|
sin β |
|||
Высота C4 N треугольника AC4 B равна

C4 N = C4 B sin[180D −(α+β)] = AB sin αsin (α+β).
Определим отрезки BN и CN:
BN = C4 B cos [180D −(α+β)]= − |
AB sin αcos (α+β) |
|
; |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
sin β |
|
|
|
|
|
|
|
|
|
CN = |
AB |
|
− BN |
= |
|
AB[sin β+ 2sin αcos (α +β)] |
. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
2 |
|
|
|
|
|
|
|
|
2sin β |
|
|
|
|
|
|
|
|
|||
Находим углы C4CN и θ: |
|
|
|
|
|
|
|
2sin αsin (α+β) |
|
|
|
|
|
|
|
|
|
|||
tg C4CN = |
|
C4 N |
= |
|
≈1,37 ; |
|
|
|
|
|
||||||||||
|
|
CN |
|
sin β+ 2sin αcos (α+β) |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
C4CN = 54D; |
θ = 90D − C4CN = 36D. |
|
|
|
|
|
||||||||||||||
Проекции возможных перемещений δ |
|
A , δ |
|
C |
точек А и С на прямую АВ равны, поэтому |
|
|
|||||||||||||
S |
S |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
δSC cos θ = δSA cos 60D, |
|
|
|
|
l δϕ |
cos 60D |
|
|
||||
|
|
|
|
|
|
|
|
δSC |
= |
1 1 |
|
. |
(4) |
|||||||
|
|
|
|
|
|
|
|
cos 36D |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Возможное перемещение точки С стержня 4 является сложным, которое может быть представлено совокупностью двух перемещений: переносного δSCe , под которым понимается перемещение точки стержня 3, совпадающей в данном положении с точкой С, и относительного δSCr , под которым понимается перемещение точки С по отношению к стержню 3. Перемещение δSCe перпендикулярно O3C , а перемещение δSCr направлено по прямой O3C (рис. Д4).
Как следует из рис. Д3, перемещение δSCe равно
|
|
δS e |
= δS |
C |
sin θ = l δϕ cos 60Dtg 36D . |
|||||||||
|
|
C |
|
|
|
|
|
1 |
1 |
|
|
|
||
Так как точка D – середина отрезка O3C , то ее перемещение |
|
|
|
|
|
|
|
|
|
|
||||
|
δSD = |
δS e |
|
|
|
|
|
|
|
|
|
|
|
|
|
C . |
|
|
|
|
|
|
|
|
|
|
|
||
|
стержня 2 вокруг оси O2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Угол поворота δϕ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δS |
B = |
l |
δϕ |
cos 60D |
|
|
||
|
|
|
δϕ2 |
= |
|
1 |
1 |
|
. |
|
||||
|
|
|
|
|
l2 cos15D |
|||||||||
|
|
|
|
|
|
l2 |
|
|
|
|
|
|||
Угол поворота δϕ3 |
стержня 3 вокруг оси O3 равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δS e |
|
l |
δϕ cos 60Dtg 36D |
|||||||
|
|
δϕ3 = |
|
C = |
1 |
1 |
|
|
|
. |
||||
|
|
|
|
|
|
l3 |
|
|||||||
|
|
|
|
|
l3 |
|
|
|
|
|
|
|
|
|
(5)
(6)
(7)
Составляем для рассматриваемого механизма уравнение возможных работ:
|
|
M1δϕ1 −M 2δϕ2 − M3δϕ3 + PδSC cos (90D −α −θ)+ |
(8) |
||||||||||||||||||||||
|
|
|
|
|
+ F sin ϕ2l2δϕ/ 3 − Fуl3δϕ3 / 2 = 0. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Заменяем в уравнении (8) возможные перемещения δSC , |
δϕ2 , δϕ3 |
в соответствии с (4), (6), (7) и выносим |
|||||||||||||||||||||||
за скобку δϕ1 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
M 2l1 cos 60 |
D |
|
|
|
D |
tg 36 |
D |
+ mgl1 cos 60 |
D |
cos 24 |
D |
|||||||||||
M |
|
|
|
− M3l1 cos 60 |
|
|
|
+ |
|||||||||||||||||
|
1 |
|
|
l2 cos15 |
D |
|
|
|
|
|
|
|
l3 |
|
|
|
|
|
cos 36 |
D |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9) |
|||||||
|
|
|
|
|
F sin 60 |
D |
2l cos 60 |
D |
|
F l |
cos 60Dtg 36D |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
у |
1 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
+ |
|
|
|
|
|
1 |
|
|
− |
|
|
|
|
|
|
δϕ |
= 0. |
|
|
|||
|
|
|
|
3cos15D |
|
|
|
2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приравнивая нулю множитель при δϕ1 в равенстве (9) (так как δϕ1 ≠ 0 ), получим уравнение для определения силы упругости, из которого находим, что Fу ≈ 3897 Н. Знак показывает, что пружина, как и предпола-
галось, сжата.
Так как Fу = cλ , то деформация пружины равна
λ = Fcу = 8,3 см.
Ответ: λ = 8,3 см.
СПИСОК ЛИТЕРАТУРЫ