

Cпутниковые Системы
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО РЫБОЛОВСТВУ Федеральное государственное образовательное учреждение ДАЛЬНЕВОСТОЧНЫЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ РЫБОХОЗЯЙСТВЕННЫЙ УНИВЕРСТИТЕТ
Кафедра Акустические приборы, системы и технические средства судовождения
Современные спутниковые радионавигационные системы (СРНС)
Учебное пособие для слушателей специальности 180402 (судовождение)
Владивосток 2006
УДК 629.123.053.83 ББК 39.471.5 К 214
Утверждено редакционно-издательским советом Дальневосточного государственного технического рыбохозяйственного университета.
Авторы: В.В. Карасёв, канд.техн.наук, профессор, зав.кафедрой «Акустические приборы, системы и технические средства судовождения» Дальрыбвтуза.
Рецензент – И.С. Карпушин, канд.техн.наук, доцент, зав.кафедрой «Управление судном» Дальрыбвтуза.
Печатается в авторской редакции
©Карасёв В.В.
©Дальневосточный государственный технический рыбохозяйственный университет, 2006
|
|
|
5 |
|
|
Содержание |
|
1 |
Введение............................................................................................................ |
6 |
|
2 |
Принципы работы спутниковой навигационной системы.................... |
8 |
|
|
2.1 |
ИСТОРИЯ ВОЗНИКНОВЕНИЯ GPS И ГЛОНАСС....................................... |
8 |
|
2.2 |
ОСНОВНЫЕ ПРИНЦИПЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ............................. |
9 |
|
2.3 |
КОСМИЧЕСКИЙ СЕГМЕНТ...................................................................... |
5 |
|
2.4 |
СЕГМЕНТ УПРАВЛЕНИЯ GPS................................................................. |
8 |
|
2.5 |
СНСГЛОНАСС.................................................................................... |
10 |
3 |
Перспективы развития спутниковой радионавигационной системы12 |
||
|
3.1 |
СРНСGALILEO................................................................................... |
12 |
|
3.2 |
СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ GPS, ГЛОНАСС, ГАЛИЛЕО............... |
15 |
|
3.3 |
ОЦЕНКА НАДЁЖНОСТИ РАБОТЫ НАВИГАЦИОННЫХ СИСТЕМ.............. |
16 |
|
3.4 |
ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯ GPS ............................................... |
17 |
|
3.5 |
РАЗВИТИЕ СИСТЕМЫ GPS .................................................................. |
20 |
|
3.6 |
РАЗВИТИЕ СИСТЕМЫ ГЛОНАСС.......................................................... |
24 |
4 |
Основные задачи решаемые плоттерами СНС....................................... |
27 |
|
5 |
Проблемы повышения точности вычисления координат объекта.... |
29 |
|
|
5.1 |
ОБЛАСТИ ПРИМЕНЕНИЯ GPS - СРЕДСТВ............................................. |
29 |
|
5.2 |
ИСТОЧНИКИ ОШИБОК ......................................................................... |
32 |
|
5.3 |
ПОВЫШЕНИЕ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ КООРДИНАТ......................... |
37 |
6 Рекомендации по использованию СНС для решения навигационных
задач....................................................................................................................... |
|
42 |
|
|
6.1 |
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ СИСТЕМЫ GPS....................................... |
42 |
|
6.2 |
ДИСПЕТЧЕРСКИЕ СЛУЖБЫ .................................................................. |
45 |
|
6.3 |
ВОЗДУШНАЯ НАВИГАЦИЯ................................................................... |
47 |
|
6.4 |
НАВИГАЦИЯ МОРСКИХ СУДОВ............................................................ |
48 |
7 |
Заключение..................................................................................................... |
49 |
|
8 |
Библиографический список........................................................................ |
52 |
|
© Карасев В.В. |
5 |
6
1 ВВЕДЕНИЕ
Системы спутниковой навигации и их приложения представляют собой одну из наиболее динамично развивающихся отраслей мировой экономики. Если к 2000 г. общий оборот её продукции составил примерно один млрд. евро, то к 2005 г. он превысил 8 млрд. евро.
Оборудование спутниковой навигации нашло широкое применение и рассматривается в качестве штатного для морских и воздушных судов, причём даже не самого высокого класса, космических аппаратов. Оно стало привычным средством в землеустройстве, при мониторинге, съёмках местности и геодезических работах. Выпуск сравнительно не дорогой потребительской аппаратуры обусловил начало её вхождения в наш быт, спорт, туризм и путешествия.
Поразительное распространение получило использование спутниковой аппаратуры для автомобильной навигации. К 2000-му г. удельный вес общей стоимости таких устройств на европейском рынке по оценке фирмы Thales составил 73%, тогда как доли авиации и морского флота не превысили 5 и 4% соответственно.
Однако, мы не стоим на пороге ещё более мощных изменений вследствие оформившейся тенденции к интеграции мобильны телефонов и приёмников спутниковых радионавигационных систем (СРНС). Выпущены на наш рынок образцы объединённой аппаратуры GSM+GPS фирмы Benefon. По прогнозу Thales к 2005 г. на объединённые с GPS трубки будет приходиться 73% европейского рынка изделий СРНС, на автомобильные приёмники-23%, а доли авиационных, морских средств не будут превышать 1% каждая.
Объединение спутниковых навигационных и мобильных телекоммуникационных технологий определяется стремлением обеспечить пользователя точным знанием места для его обращения к информационным источникам и эффективной работы службы спасения 911 и 112. Таким
© Карасев В.В. |
6 |
7
образом, спутниковые приёмники начали вторжение в область связи, обработки и передачи данных, информационных технологий и Интернет.
В тоже время сами спутниковые радионавигационные системы не стоят на месте. Находится в стадии развития и модернизации GPS. Федеральная целевая программа России на 2002-2011 гг. « Глобальная навигационная система» предусматривает воссоздание полной группировки Глонасс к 2008 г. и на этот же год намечено создание Европейской СРНС Галилео. Находятся на стадии испытания дополняющие широкозонные дифференциальные подсистемыСевероАмериканская WAAS и Европейская EGNOS, строится аналогичная японская подсистема MSAS, расширяется сеть морских и геодезических дифференциальных подсистем. Разрабатываются и появляются на рынке новые более совершенные образцы аппаратуры пользователей, совершенствуются способы её применения.
© Карасев В.В. |
7 |
8
2 ПРИНЦИПЫ РАБОТЫ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
2.1История возникновения GPS и Глонасс
Кначалу 70-х годов оказалось, что стоявшая в то время на вооружении армии США спутниковая навигационная система TRANSIT имела существенные недостатки: относительно невысокая точность определения координат, большие промежутки времени между наблюдениями. С целью преодоления этих недостатков было принято решение начать работы над созданием спутниковой навигационной системы нового поколения.
Первоначально она называлась NAVSTAR (NAVigation Satellite providing Time And Range), т.е. “навигационная спутниковая система, обеспечивающая измерение времени и местоположения” (сейчас можно встретить двойное название: GPS-NAVSTAR). Основным назначением NAVSTAR была высокоточная навигация военных объектов. Непосредственная реализация программы началась в середине 1977 г. с запуском первого спутника. С 1983 г. система открыта для использования в гражданских целях, а с 1991 г. сняты ограничения на продажу GPS-оборудования в страны бывшего СССР. В 1993 г. система была полностью развернута. Затраты на ее реализацию превысили 15 млрд. USD.
ВРоссии действует аналогичная система спутниковой навигации ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система). Развитие отечественной спутниковой радионавигационной системы ГЛОНАСС имеет уже практически 40-летнюю историю, начало которой положено, как чаще всего считают, запуском 4 октября 1957 года в Советском Союзе первого в истории человечества искусственного спутника Земли . Измерения доплеровского сдвига частоты передатчика этого ИСЗ на пункте наблюдения с известными координатами позволили определять параметры движения этого спутника. Принцип работы, которой во многом подобен GPS.
© Карасев В.В. |
8 |
9
2.2Основные принципы определения координат
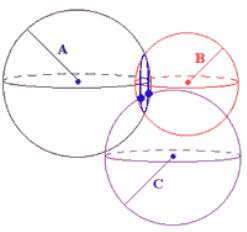
Воснове определения координат GPS-приемника лежит вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные находятся в принятом с GPS-спутника «альманахе»). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется «трилатерацией» (рис. 1).
Рис. 1 Определение координат в спутниковой навигационной системе Если известно расстояние А до одного спутника, то координаты
приемника определить нельзя (он может находиться в любой точке сферы радиусом А, описанной вокруг спутника). Пусть известна удаленность В приемника от второго спутника. В этом случае определение координат также не представляется возможным — объект находится на окружности, которая является пересечением двух сфер. Расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены двумя жирными точками на рис. 1). Этого уже достаточно для однозначного определения координат — дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близости от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, для трехмерной навигации теоретически достаточно знать расстояния от приемника до 3 спутников.
© Карасев В.В. |
9 |
10
Однако все не так просто. Приведенные выше рассуждения рассматривались для случая, когда расстояния от точки наблюдения до спутников были известны с абсолютной точностью. Разумеется, на практике всегда есть некоторая погрешность измерений («невязка») — например, из-за неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и др. Поэтому для определения трехмерных координат GPS-приемника используются не 3, а, как минимум, 4 спутника. Получив сигнал от 4 (или более) спутников, GPS-приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор GPSприемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.
Координаты подвижного абонента определяются с помощью стандартного навигационного GPS-приемника, встроенного в терминал пользователя. Навигационный приемник сигналов для системы GPS состоит из приемного модуля и малогабаритной антенны с малошумным усилителем. Приемный модуль выпускается как в виде автономного устройства со встроенными источниками питания, так и в виде отдельной платы, встраиваемой в абонентский терминал. Устройство, как правило, использует собственную миниатюрную антенну и автономно вычисляет географические координаты и всемирное время (UTC) по навигационным сигналам. GPSприемники чаще всего применяются, если необходимо получить высокую точность координат (погрешность — не более 100 м). Захватив сигнал, навигационный приемник автоматически вычисляет координаты объекта, скорость сигнала и всемирное время, и формирует отчет. Сведения о местонахождении объекта передаются по спутниковым каналам связи в диспетчерский пункт. Навигационные устройства могут различаться по количеству каналов приема, скорости обновления данных, времени вычислений, точности и надежности определения координат.
© Карасев В.В. |
10 |
11
Современные GPS-устройства обычно оснащены 6-8 приемниками, что позволяет отслеживать, практически, все навигационные спутники, находящиеся в зоне радиовидимости объекта. Если каналов меньше, чем «наблюдаемых» спутников, автоматически выбирается наиболее оптимальное сочетание спутников. Скорость обновления навигационных данных — 1 с. Время обнаружения зависит от числа одновременно наблюдаемых спутников и режима определения местоположения. Определение навигационных параметров может производиться в двух режимах — 2D (двумерном) и 3D (пространственном). В режиме 2D устанавливаются широта и долгота (высота считается известной). При этом достаточно присутствия в зоне радиовидимости 3 спутников. Время определения координат в режиме 2D обычно не превышает 2 мин. Для определения пространственных координат абонента (режим 3D) требуется, чтобы в соответствующей зоне находились не менее 4 спутников. Гарантируются время обнаружения не более 3-4 мин и погрешность вычисления координат — не более 100 м.
В околоземном пространстве развернута сеть искусственных спутников Земли (ИСЗ), равномерно “покрывающих” всю земную поверхность. (Рис.2) Орбиты ИСЗ вычисляются с очень высокой точностью, поэтому в любой момент времени известны координаты каждого спутника. Радиопередатчики спутников непрерывно излучают сигналы в направлении Земли. Эти сигналы принимаются GPS-приемником, находящемся в некоторой точке земной поверхности, координаты которой нужно определить.
© Карасев В.В. |
11 |