

Глава XVIII Элементы фотограмметрии
Фотограмметрия– научная дисциплина, изучающая способы определения формы, размеров и пространственного положения объектов в заданной системе координат по их фотографическим и иным изображениям.
Аэрофотосъемка– совокупность работ, целью которых является поучение аэроснимков (и аэронегативов) для использования их в дальнейшем при составлении карт и планов. В аэрофотосъемку входят летно-съёмочные работы, полевые фотолабораторные работы (поучение первичной продукции), полевые фотограмметрические работы – регистрация и оценка качества материалов.
Фотоизображение, представляющее собой перспективное изображение в центральной проекции, строится при помощи системы линз – объектива– дающей действительное обратное изображение. Геометрическое место центров кривизны линз – прямая, называемая главной оптической осью. Все лучи, параллельные главной оптической оси, пересекают её после преломления в одной точке – главном фокусе (их два – передний в пространстве предмета и задний в пространстве изображения). Плоскость, в которой изображение предмета получается резким, называется фокальной плоскостью. При большом удалении предмета фокальная плоскость проходит через фокус и практически совпадает с одной из главных фокальных плоскостей – плоскостью, проходящей через фокус перпендикулярно главной оптической оси. Узловые точки – точки, обладающие следующим свойством: если луч входит в одну узловую точку, то он выходит из второй в первоначальном направлении; так как расстояние между ними не влияет на ход лучей, в фотограмметрии их рассматривают как одну точку. Расстояние от узловой точки до фокуса называют фокусным расстоянием объектива. Из курса оптики известно, что еслиD– расстояние от узловой точки до объекта,d– расстояние до изображения, то 1/f= 1/D+ 1/d; т.к.Dвелико, то принимаютf=d. Поэтому светочувствительный материал помещают в главной фокальной плоскости. Тогда масштаб получаемого горизонтального снимкаmможно найти из подобия треугольников (рис. ) 1/m=f/H, гдеH– высота фотографирования.

Рис.
Реальный объектив характеризуется фокусным расстоянием, полем и углом зрения и изображения, глубиной резкости, светосилой, разрешающей способностью и аберрациями. Поле зрения – изображение, в пределах которого есть хотя бы минимальная освещённость. Поле изображения – часть поля зрения, в которой изображение получается достаточно резким и одинаково ярким. Величина относительного отверстия 1/n=d/f, гдеd– диаметр действующего отверстия. Оптимальными для аэрофотосъёмки считаются относительные отверстия от 1/4 до 1/11. Глубина резкости характеризует способность объектива строить резкие изображения объектов, расположенных на различных расстояниях. При наведении на бесконечность точка, расположенная на конечном расстоянии, отображается в фокальной плоскости не в виде точки, а в виде некоторой окружности диаметра δ =f2/nD. Отсюда минимальное расстояние до точки, при котором диаметр её изображения не превысит δ, равенD=f2/nδ. Эта величина называется гиперфокальным расстоянием.
Разрешающая способность объектива – число раздельно различимых линий на 1 мм. Теоретически разрешающая способность колеблется между 300 – 400 линий на 1 мм; практически же она не превышает 40-60 (у лучших аэрофотокамер доходит до 100-150 линий на мм). Аберрации бывают хроматические (неодинаковое преломление лучей с разной длиной волны), сферические (из-за несовпадения коэффициентов преломления в различно удалённых от центра точках). Дисторсия вызывается нарушением подобия изображения объекта, расположенного в плоскости, перпендикулярной главной оптической оси. Дисторсия в применяемых для фотограмметрических съёмок метрических камерах уменьшена до 2 мкм. Влияние всех видов аберраций, ухудшающих разрешающую способность, устраняют или уменьшают путём подбора линз.
Аэрофотоаппарат(АФА) – сложный высокоточный оптико-механический или электронный прибор. АФА состоит из: корпуса (предназначен для размещения механизмов; в верхней части размещена прикладная рамка, чья плоскость совпадает с главной фокальной плоскостью), конуса (содержит оптическую систему), кассеты (содержит плёнку и механизм для прижимания её к прикладной рамке), командного прибора (для управления всеми механизмами) и аэрофотоустановки (предназначена для крепления аэрофотоаппарата на носителе). АФА не имеет приспособления для наводки на резкость, так как высота фотографирования больше гиперфокального расстояния.
Современные АФА имеют в плоскости прикладной рамки координатные метки, расположенные по углам кадра или распределённые равномерно в виде сетки. Метки имеют специальные признаки, делающими возможным автоматические распознавание точек.
Аэрофотосъёмкуподразделяют на плановую (угол α между главной оптической осью и отвесной линией не более 3°) и перспективную (α>3°; для картографирования не используется); также аэросъёмка подразделяется на одинарную (объект фотографирования размещён на одном или двух снимках), маршрутную (ведётся фотографирование узкой полосы местности), площадную (участок в силу размеров должен быть снят с нескольких параллельных маршрутов).
В процессе аэрофотосъёмки должны удовлетворяться определённые требования, контроль за соблюдением которых производится как в процессе съёмки, так и при оценке качества полученных материалов. Высота фотографирования – расстояние по отвесной линии от узловой точки объектива до некоторой поверхности. Абсолютная высота – расстояние измеряется до уровня моря; относительная высота – до поверхности аэродрома; истинная высота – над конкретной точкой местности; высота – над средней плоскостью снимаемого участка. Высота фотографирования над средней плоскостью определяется при предполётной подготовке в зависимости от параметров съёмки: H=mf. Реальная высота не должна отличаться от расчётной более чем на 3%.
Для определения высоты фотографирования по топокарте определяют максимальную Hmaxи минимальнуюHminотметки точек на участке работ, по требуемому масштабу съёмки фокусному расстоянию определяют высоту фотографирования над средней плоскостью и вычисляют абсолютную высоту фотографирования:Hабс= ½(Hmax+Hmin) +mf.
Возможность обработки снимков обеспечивается их перекрытием. Продольное перекрытие(рис. ) должно быть не менее 56%, в среднем 60%; в отдельных случаях оно достигает 90-95%. (столь высокое перекрытие позволяет при съёмке местности с многоэтажной застройкой выбраковывать некоторые снимки). Поперечное перекрытие должно быть не менее 20%, в среднем 30-35% и может достигать 60%. Наличие перекрытий позволяет использовать для обработки только центральную часть снимка, где искажения минимальны; эта часть снимка называется рабочей площадкой.

Рис. Продольное перекрытие снимков 1, 2 и 3.
Расчетные перекрытия pиqсмежных снимков находятся по эмпирическим формулам:p= (62 + 50h/H)%,q= (32 + 50h/H)%, гдеh– превышение над средней плоскостью участка,H– высота фотографирования. Базис фотографированияBXи расстояние между маршрутамиBYопределится так:BX=l(1 –p/100)m,BY=l(1 –q/100)m,l– размер кадра фотокамеры. Интервал между экспозициями определяется по скоростиVносителя АФА:t=BX/V.
Маршруты, по которым осуществляется съёмка, должны удовлетворять следующим требованиям. Прямолинейность маршрутахарактеризуется отношением стрелки прогибаlк длине маршрутаL; она измеряется в процентах и не должна превышать 2-3% (рис. ). Непараллельность стороны снимка (базиса фотографирования) не должна превышать 5-10°. Угол наклона снимка не вызывает затруднений при обработке, однако согласно нормативным документам он не должен превышать 3° без использования средств стабилизации и 1° при их наличии; количество снимков с максимально допустимым углом наклона не должен превышать 10%. На метеорологические условия накладываются следующие ограничения: небо должно быть безоблачным, нежелательны дымка, туман, повышенная влажность воздуха; сезон аэрофотосъёмок длится с третьей недели после таяния снега и до периода систематических осенних дождей.

Рис. Прямолинейность маршрута.
В фотограмметрии используются системы координатместности (геоцентрическая, Гаусса, местные, фотограмметрическая – правая1прямоугольная система координат с центром в произвольной точке, как правило – с центром проекции или точкой местности) и координатные системы аэроснимка (внутренние и внешние).
Плоская прямоугольная система координат oxy– внутренняя, предназначена для определения положения точек снимка. Осьoxсоединяет координатные метки 1-2, осьoyей перпендикулярна, начало координат совмещено с точкой пересечения линий 1-2 и 3-4. Если главная точка снимка (точка пересечения главной оптической оси и плоскости снимка) не совпадает с точкой пересечения линий 1-2 и 3-4, то
xm=x–x0,ym=y–y0;
где x,y– измеренные координаты,x0иy0– координаты главной точки снимка.
Промежуточная система координат Sxyzявляется внешней. Её начало размещено в центре проекции (узловой точке объектива)S, осьSzсовмещена с продолжением главного оптического луча, осиSxиSyпараллельны осям координатной системы снимка.
Элементы внутреннего ориентированияснимка – фокусное расстояние и координаты главной точки снимка – определяют положение центра проекции относительно плоскости снимка.Элементы внешнего ориентированияопределяют положение плоскости снимка относительно системы координат местности в момент фотографирования. В фотограмметрии используются три системы элементов внешнего ориентирования, состоящих из шести элементов. Линейные элементы во всех трёх одинаковы – это координаты центра фотографированияXS,YS,ZSв фотограмметрической системе координатOXYZ. Угловые элементы в первой системе – это продольный угол наклона α между осьюOZи проекцией главного оптического лучаSoна плоскостьSXZ; поперечный угол наклона ω в плоскостиSoYмежду лучомSoи его проекцией наSXZ; угол поворота χ между осью у и следом сечения плоскостиSoY. Во второй системе угловыми элементами служат продольный угол наклона φ между лучомSoи его проекцией на плоскостьSYZ(он лежит в плоскостиSoX); поперечный угол наклона ωˉ между осьюSZи проекцией лучаSoнаSYZ; угол поворотаkмежду осьюxи следом сечения плоскостиSoXплоскостью, проведенной черезSoиSX. Эти системы используются преимущественно при обработке снимков и в конструкциях приборов; третья система α (суммарный угол наклона),t(дирекционный угол проекции главной вертикали), χ´ (угол поворота снимка) используется при математическом анализе изображений.
Пусть в результате процесса фотографирования получен снимок местности. Чтобы найти зависимость между координатами изображения точки pна снимке и координатами точкиPна местности, воспользуемся уравнением прямой, проходящей через две заданные точки в пространстве:
(x3 – x1)/(x2 – x1) = (y3 – y1)/(y2 – y1) = (z3 – z1)/(z2 – z1)
В системе координат SXYZ координаты точек P и p соответственно: XP – XS, YP – YS, ZP – ZS и Xp, Yp, Zp, где XS, YS, ZS – координаты центра фотографирования. Тогда
Xp/(XP – XS) = Yp/(YP – YS) = Zp/(ZP – ZS)
Отсюда
XP – XS = (ZP – ZS)XP/ZP,
YP – YS = (ZP – ZS)Yp/ZP.
Из этих формул видно, что для определения координат точки на местности координат её изображения на снимке недостаточно – необходимо знать высоту точки на местности ZP.
Для нахождения всех координат точки по результатам съёмки пользуются парой снимков2. Два смежных перекрывающихся снимка образуют стереопару, по которой определяют все три координаты точки – задачу на нахождение координат точки по паре снимков называют прямой фотограмметрической засечкой. Пусть требуется определить зависимость между координатами изображений точки на снимках и координатами точки на местности, если положение снимков относительно системы координат известно.

Рис. Прямая фотограмметрическая засечка.
Так как r¯1иr¯2коллинеарныR¯1иR¯2, тоR¯1=A1r¯1,R¯2=A2r¯2. Из рисунка () видно, чтоR¯0=R¯1–R¯2, или
BX = A2X2 – A1X1
BY = A2Y2 – A1Y1
BZ = A2Z2 – A1Z1,
где BX,BY,BZ иX1,Y1,Z1– координаты правого центраS2и точкиp1в системеS1XYZ,X2,Y2,Z2– координаты точкиp2в системеS2XYZ. Выразив из этих уравнений величины Аiи спроектировав векторR¯Sна координатные оси системыOXYZ, получим:
XP = XS1 + A1X1 = XS1 + BX +A2X2,
YP = YS1 + A1Y1 = YS1 + BY + A2Y2,
ZP = ZS1 + A1Z1 = ZS1 + BZ + A2Z2.
Важно, чтобы взаимное положение снимков было вполне определено; положение двух смежных снимков определяется элементами внешнего ориентирования. Таковыми являются координаты центров фотографирования XS1,XS2,YS1,YS2,ZS1,ZS2, продольные углы наклона правого и левого снимков α1и α2, поперечные углы наклона снимков ω1и ω2и углы разворота снимков χ1и χ2. ПустьBX=XS2–XS1,BY=YS2–YS1,BZ=ZS2–ZS1, Δα = α2– α1, Δω = ω2– ω1, Δχ = χ2– χ1,tgτ =BY/BX,sinν=BZ/B, где В – базис фотографирования (длина отрезкаS1S2). Из элементов внешнего ориентирования с координатной системой связаны элементы внешнего ориентирования одного снимка и базис (определяющий масштаб). Величины Δα, Δω, Δχ, τ и ν, не связанные с системой координат местности, называютсяэлементами взаимного ориентирования.
Получить горизонтальный снимка практически невозможно. Однако существует простой способ пересчёта координат изображения точки наклонного снимка в координаты точки снимка горизонтального. Такой пересчёт координат называется трансформированием координат. Пусть из точкиSсделано два снимка – горизонтальный и наклонный; точкаp0горизонтального снимка имеет координатыx0иy0, а точкаpнаклонного снимка – координатыxиy. Тогда (см. рис. )x0 = –fX/Z= –f (a1x+a2y–a3f)/(c1x+c2y–c3f),y0= – fY/Z= –f (b1x+b2y–b3f)/(c1x+c2y–c3f), гдеa,b,c– направляющие косинусы (косинусы углов, образованных координатными осями двух систем координат).
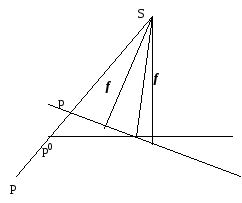
Рис. Зависимость координат наклонного и горизонтального снимков.
Условием взаимного ориентирования пары снимковявляется размещение векторов в одной базисной плоскости и их пересечение в одной точке. Это требование эквивалентно условиюR¯0×(R¯1×R¯2) = 0. Иначе:R¯0×(r¯1×r¯2) = 0; это равенство не зависит от системы координат. Направив ось абсцисс вдоль базиса фотографирования, это равенство можно переписать в матричной форме в таком виде:
B0 0
Xʹ1Yʹ1Zʹ1= 0,
Xʹ2Yʹ1Zʹ1
где
Yʹ1=bʹ1x1+bʹ2y1–bʹ3f ,Yʹ2=bʹʹ1x2+bʹʹ2y2–bʹʹ3f,
Zʹ1=cʹ1x1+cʹ2y1–cʹ3f,Zʹ2=cʹʹ1x2+cʹʹ2y2–cʹʹ3f;
bʹi,cʹi,bʹʹiиcʹʹi– направляющие косинусы.
После преобразований получим уравнение взаимного ориентирования в базисной системе: y01–y02= 0, гдеy0– трансформированная ордината. Полученное условие является требованием равенства трансформированных ординат точек – равенства нулю поперечного параллакса, что и отмечается при стереоскопических наблюдениях.
Стереоскопические наблюдения могут быть произведены в случае выполнения следующих условий: снимки должны быть получены из разных точек пространства; угол конвергенции3не должен превышать 15°; разность масштабов снимков не должна превышать 16% от их величины (не имеет значения, если рассматривать снимки через оптическую систему, позволяющую давать различное увеличение правому и левому снимкам); линии, соединяющие одноименные точки, должны быть параллельны глазному базису4(достигается разворотом снимков); каждый глаз должен видеть только один снимок. Основные затруднения связаны с выполнением последнего условия. Для разрешения этой проблемы применяются различные способы. Оптический способ требует использования оптических приборов; примером такого прибора служит линзово-зеркальный стереоскоп. При анаглифическом способе наблюдают два совмещённых изображения в дополнительных цветах. Наблюдение ведётся через анаглифические очки со стеклами соответствующих цветов; тогда каждый глаз видит изображение только одного цвета и наблюдатель видит одноцветную пространственную модель, которая является результатом либо сложения дополнительных цветов, либо вычитания их из белого. При способе вычитания напечатанные на белом фоне красной и сине-зелёной красками изображения рассматриваются через очки с сине-зелёным и красным светофильтрами. Наблюдатель видит одним глазом темное изображение на красном фоне, другим – темное на сине-зеленом фоне, и в целом – пространственную картину темного цвета на белом фоне. При способе сложения на один экран проецируются изображения в дополнительных цветах; при рассматривании экрана через анаглифические очки возникает пространственная картина на тёмном фоне.
Основная задача фотограмметрии – определение формы, размеров и пространственного положения объектов – при использовании цифровых изображений решается объединением вычислительной обработки (ориентирования снимков) с определением необходимых величин (идентификацией точек и определением их координат), что при использовании современных средств делает фотограмметрическую обработку эффективной даже при исполнителях, не имеющих высокой квалификации.
Цифровое изображениеможет быть представлено в векторной или растровой форме. Векторная форма цифрового изображения состоит из набора примитивов и их комбинаций (точки, векторы, грани, рёбра); положение точек определяется в координатной системе, задаваемой пользователем. В растровой форме изображение представляется в виде матрицы, состоящей из соответствующих определённым участкам местности элементов (пикселей). Именно растровая форма в фотограмметрии называется цифровым изображением. В растровой системе координат начало располагается в левом верхнем углу, оси направлены по внешним границам; координаты пикселя – это его номер в соответствующем столбце и строке. Необходимые при фотограмметрической обработке физически координаты точки находятся по растровым координатам и размеру пикселя. Геометрическое разрешение цифрового изображения представляется либо линейной величиной (в метрах для местности или в мкм для снимка), либо числом точек на дюйм. Радиометрическая характеристика определяет число уровней квантования яркости и фотометрическое содержание элемента изображения.
Для преобразования снимка в план необходимы сведения о рельефе местности, в частности, цифровая модель рельефа. Цифровая модель рельефа– математическое описание земной поверхности как совокупности точек на ней, связей между этими точками, и метод определения высот точек по их плановым координатам. Определение высот может быть выполнено двумя путями. В первом случае используются способы, основанные на интерполяции высот при помощи полиномов, корреляционных функций и т.п. При использовании полиномов моделируемую поверхность представляют полиномами степени не выше пятой, коэффициенты в котором приXiYj(i+j≤5) находят из уравнений, составленных для опорных точек; полученную систему решают последовательными приближениями. Во втором случае строится геометрически упорядоченная модель, элементами которой являются либо линии, либо поверхности многогранников. Структурная модель местности состоит из отметок точек, расположенных в характерных точках рельефа (на водоразделах, на урезах вод и т.д.); несмотря на высокую точность при малом числе точек, использование такой модели затруднено из-за сложностей с интерполяцией высот. Цифровая модель на треугольниках представляет рельеф наиболее точно (модельTIN, или модель на нерегулярной решётке). Построение цифровой модели рельефа с использованиемTINсводится к созданию оптимальной сети треугольников. Модель на регулярной сетке имеет стороны, параллельные координатным осям.
При построении сетки треугольников наиболее часто используется триангуляция Делоне – сеть треугольников, удовлетворяющие следующим требованиям: внутрь окружности, описанной вокруг треугольника, не должна попадать ни одна из исходных точек; триангуляция является выпуклой; сумма вех минимальных углов треугольников максимальна; сумма радиусов описанных вокруг треугольников окружностей минимальна. Для большего приближения земной поверхности моделью вводятся структурные линии – тальвеги, водоразделы, береговые линии, овраги и т.д., которые внедряются в триангуляцию; задача построения модели с учетом структурных линий называется триангуляцией Делоне с ограничениями.
Стереоскопическое наблюдение цифровых изображений, помимо известных способов наблюдения фотоизображений, возможно выполнять и некоторыми другими, например, затворным. Этот способ предполагает использование специальных очков с LCD-затворами (жидкокристаллические, затворные очки). Наличие тонкого жидкокристаллического слоя позволяет менять прозрачность стекол; связь с компьютером позволяет поочередно, в соответствии с демонстрируемым кадром, видеть изображение поочередно то одним, то другим глазом, что и создает стереоэффект. Вывод правого и левого изображений может быть покадровым или построчным.
1Правая (английская) система координат – преобразование осейX→Y→Z→Xвыполняется вращением по часовой стрелке; в левой (французской) – против часовой стрелки.
2Раздел фотограмметрии, занимающийся вопросами определения всех пространственных характеристик объектов, называется стереофотограмметрией.
3Угол конвергенции – угол, под которым пересекаются зрительные оси.
4Глазной базис – линия между оптическими центрами хрусталиков левого и правого глаз.