

Лаб3
.docМинистерство образования и науки Российской Федерации
ГОУ ВПО Рыбинская государственная авиационная технологическая
академия имени П. А. Соловьёва
Факультет радиоэлектроники и информатики
Кафедра «Вычислительные системы»
Отчет по лабораторной работе
по дисциплине
«Основы теории управления»
на тему:
«Моделирование следящей системы»
Студент группы ВС-07 Кротов Д.А.
Преподаватель Павлов Р. В.
Рыбинск 2011
Цель работы
Целью работы является ознакомление с различными способами описания линейных динамических систем и методами их исследования.
Задание
Вариант №5
K=3, T1=0.25, T2=8.
Выполнение работы
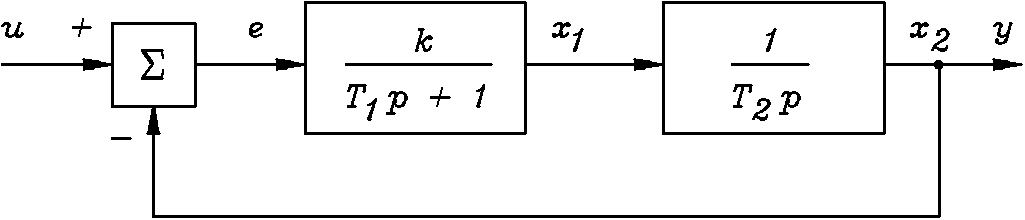
Рисунок 1
Исследуемая система представлена на рисунке 1. Найдем передаточную функцию Q(р) этой следящей системы. По передаточным функциям отдельных блоков можно построить общую передаточную функцию следящей системы
![]() ,
,
с вязывающую
изображения входного и выходного
сигналов. Для этого в соответствии со
структурной схемой, выписывается система
уравнений
вязывающую
изображения входного и выходного
сигналов. Для этого в соответствии со
структурной схемой, выписывается система
уравнений
![]() (1)
(1)
![]()
которая затем преобразуется к одному уравнению, путем исключения переменной e(p)
![]()
Выражая выходной сигнал через входной, получаем
![]()
где Q(р) – передаточная функция системы. Она имеет вид
![]()
Ее параметры b0, a0, a1 связаны с параметрами k, T1, T2 исходной системы.
![]()
Подставив исходные значения параметров получим, что b0=1.5, a0=1.5, a1=4.
Тогда искомая передаточная функция системы имеет вид
![]()
Чтобы перейти к описанию следящей системы с помощью дифференциального уравнения, необходимо заменить в уравнении
![]()
оператор р оператором дифференцирования d/dt
![]()
или, если подставить параметры
![]()
Решая это дифференциальное уравнение, можно найти реакцию следящей системы на любое входное воздействие.
Характеристическое уравнение имеет вид
![]()
Находим его корни: p1= -0.418861169915810334, p2= -3.581138830084189666. Проанализировав их можно сделать вывод о том, что исследуемая система устойчива.
Для получения описания следящей системы в пространстве состояний выберем в качестве переменных состояния x1 и x2 выходные сигналы звеньев первого порядка на структурной схеме (рисунок 1).
Составим для каждого из них дифференциальные уравнения первого порядка
![]()
![]()
Алгебраическое уравнение для выходного сигнала
![]()
Подставив параметры, получим
![]()
![]()
![]()
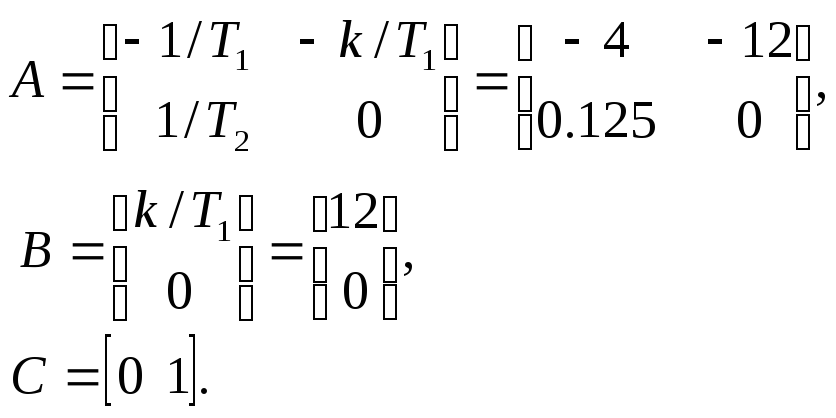
В матричном виде описание следящей системы в пространстве состояний имеет вид
![]()
где
Найдем
передаточную функцию системы
![]()
![]()
Чаще
всего систему характеризуют реакцией
на дельта-функцию
![]() и на единичную функцию (функцию единичного
скачка) u =
1(t). Эти
реакции известны как импульсная весовая
функция системы y
= q(t) и
переходная функция y
= p(t) .
Изображения этих функций по Лапласу
связаны с передаточной функцией формулами
и на единичную функцию (функцию единичного
скачка) u =
1(t). Эти
реакции известны как импульсная весовая
функция системы y
= q(t) и
переходная функция y
= p(t) .
Изображения этих функций по Лапласу
связаны с передаточной функцией формулами
![]()
Найдем весовую функцию системы. Она равна передаточной функции.
![]()
Переходная функция равна передаточной функции системы, поделенной на p.
![]()
Найдем аналитическое выражение выходного сигнала системы при подаче на ее вход u = 1(t). Для этого выполним обратное преобразование Лапласа.
![]()
![]()
График выходного сигнала изображен на рисунке 2.
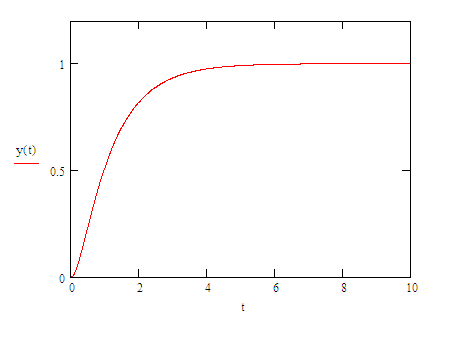
Рисунок 2