

1 Амплитудное регулирование
Для моделирования процессов регулирования воспользуемся следующей последовательностью, которая прописана в файле vvrreg.m:
-
Зададим основные параметры:
-
 – время
модулирования (период гармоники);
– время
модулирования (период гармоники); -
 – период
модулирования;
– период
модулирования; -
 – амплитуда
нерегулируемых компонентов,
– амплитуда
нерегулируемых компонентов,
 ;
; -
 – амплитуда
регулируемых компонентов,
– амплитуда
регулируемых компонентов,
 .
. -
 – управляющий
фактор,
– управляющий
фактор,
 ;
;
-
Произведем подбор оптимальных параметров
 с помощью функции нелинейной оптимизации
по критерию наименьших квадратов
с помощью функции нелинейной оптимизации
по критерию наименьших квадратов
 :
:
f=lsqnonlin('fr',[TM, Y, Z]);
Z=f(3);
Y=f(2);
TM=f(1);
Подпрограмма fr.m:
function f=fr(X)
T=20e-3;
Z=X(3);
Y=X(2);
TM=X(1);
X=linspace(0,TM,16);
UD=0;
for i=1:16
u=vvr(Z,Y,X(i),T,TM);
FS=abs(2*fft(u)/size(u,2));
DT=T/(size(u,2));
UD(i)=sqrt((DT/T)*sum(u.^2));
KG(i)=sqrt(sum(FS(3:128).^2)/(sum(FS(2:128).^2)));
end
US=linspace(11, 9, 16);
f=US-UD+max(KG)*(0.01);
Получаем:
-
Организуем цикл, количество проходов которого совпадает с количеством значений управляющего фактора, в цикле производится формирование напряжения сложной формы:
for i=1:N
U=vvr(Z,Y,X(i),T,TM);
UU(i,:)=U;
FS=abs(2*fft(U))/size(U,2);
DT=T/size(U,2);
UD(i)=sqrt((DT/T)*sum(U.^2));
KG(i)=100*sqrt(sum(FS(3:20).^2))/sqrt(sum(FS(1:20).^2));
End
US=linspace(11, 9, 16);
subplot(2,1,1);
plot(X,UD,X,US,'*');grid;
subplot(2,1,2);
plot(KG,'LineWidth',2);grid;
figure
plot(UU(8,:));grid;
Формирование мгновенных значений напряжения производиться с помощью подпрограммы vvr.m:
function [U,t]=vvr(Z,Y,X,T,TM)
t=linspace(0,T,256);
teta=X/2;
E=sin((2*pi/T)*t);
S1=sp(TM,teta,TM/2,t);
S2=sp(TM,teta+TM/2,T,t);
S=S1+S2;
URK=Y*E;
UNK=Z*E;
U=UNK+URK.*S;
end
Подпрограмма sp.m представляет собой функцию селекции периодического интервала:
function S=sp(TM,tn,tk,t)
S=zeros(size(t));
ts=mod(t,TM);
SNT=(ts>=tn);
SKT=(ts<tk);
ST=SNT&SKT;
S=S|ST;
end
Разработанная
модель позволяет проводить параметрическую
оптимизацию, а именно определение
оптимальных значений
![]() .
.
Построим на одном графике фактическую и заданную регулировочные характеристики (рисунок 1.1), а также график иллюстрирующий форму выходного напряжения (рисунок 1.2):

Рисунок 1.1 – Регулировочные характеристики (сверху) и значения коэффициента гармоник (снизу)
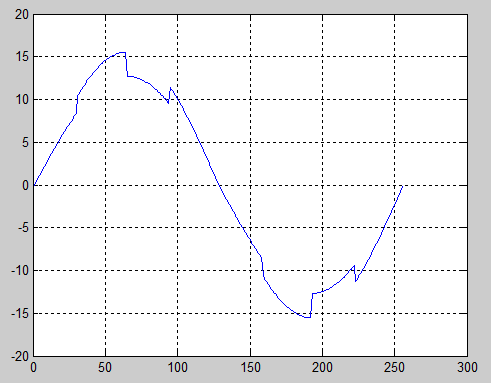
Рисунок 1.2 – Форма выходного напряжения
2 Комбинированное амплитудно-фазовое регулирование.
Переходим к дискретному регулятору с амплитудным (дискретное изменение амплитуды РК) и фазовым регулированием (дискретное изменение момента включения РК).
Разобьем исходный интервал регулирования на дискреты. Для этого в следующем этапе программы vvrreg.m вводим новую переменную – число дискрет q. Пусть первоначальное число дискрет будет 5. При моделировании формы выходного напряжения в функцию vvr вместо амплитуды РК будут передаваться значения от минимального до максимального (равного амплитуде РК) с количеством шагов равным q. С помощью массивов UDD и KGG будет производиться накопление действующего значения напряжения и значения коэффициента гармоник для всех дискрет.
N=256;
q=7;
dY=Y/q;
X=linspace(0,TM,N);
KGG=[];
UDD=[];
for j=1:q
for i=1:N
U=vvr(Z,j*dY,X(i),T,TM);
FS=abs(2*fft(U))/size(U,2);
KG(i)=100*sqrt(sum(FS(3:20).^2))/sqrt(sum(FS(1:20).^2));
DT=T/size(U,2);
UD(i)=sqrt((DT/T)*sum(U.^2));
end;
KGG=[KGG KG];
UDD=[UDD UD];
end;
tt=1:(size(UDD,2));
D=find(KGG<7);
figure
subplot(2,1,1);
plot(tt,UDD,tt(D),UDD(D),'.g');grid
subplot(2,1,2);
plot(tt,KGG,'LineWidth',2);grid;
При выполнении данного этапа программы будут построены графики дискретной регулировочной характеристики и график значений коэффициента гармоник (рисунок 2.1).
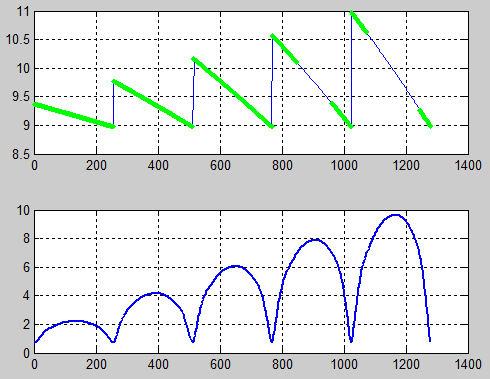
Рисунок 2.1. – Регулировочная характеристика (сверху) и соответствующие
значения коэффициента гармоник (снизу)
Как
видно из рисунка 2.2 при количестве
дискрет
![]() ,
области с допустимым коэффициентом
гармоник не перекрываются.
,
области с допустимым коэффициентом
гармоник не перекрываются.

Рисунок
2.2. –
Увеличенный фрагмент регулировочной
характеристики при
![]()
Будем
увеличивать
![]() до тех пор, пока не будет перекрытия
диапазона регулирования. Таким образом,
получаем
до тех пор, пока не будет перекрытия
диапазона регулирования. Таким образом,
получаем
![]() .
.

Рисунок
2.3. –
Увеличенный фрагмент регулировочной
характеристики при
![]()
Таким образом, получаем регулировочную характеристику и соответствующие коэффициенты гармоник (рисунок 2.4)
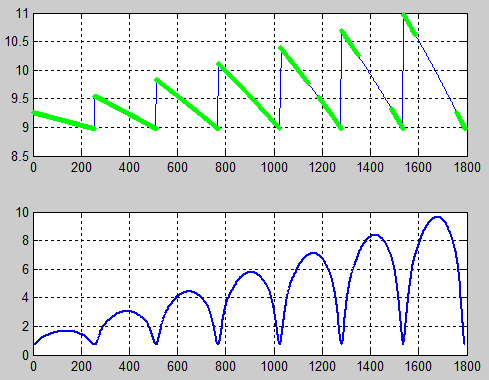
Рисунок 2.4. – Регулировочная характеристика (сверху) и соответствующие
значения коэффициента гармоник (снизу)