

1.2 Момент инерции
Моментом инерции системы (тела) относительно оси вращения называется скалярная физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси:
![]() .
.
В случае непрерывного распределения масс эта сумма сводится к интегралу:
![]() ,
,
где
интегрирование производится по всему
объёму тела. Величина
![]() в этом случае есть функция положения
точки с координатамиx,
y,
z.
в этом случае есть функция положения
точки с координатамиx,
y,
z.
Если
известен момент инерции тела относительно
оси, проходящей через его центр масс,
то момент инерции относительно любой
другой параллельной оси определяется
теоремой
Штейнера:
момент инерции тела I
относительно
любой оси
вращения равен моменту его инерции
![]() относительно параллельной оси, проходящей
через центр массC
тела,
сложенному с произведением массы m
тела на квадрат расстояния d
между осями:
относительно параллельной оси, проходящей
через центр массC
тела,
сложенному с произведением массы m
тела на квадрат расстояния d
между осями:
![]() .
.
В таблице 1.2.1 приведены значения моментов инерции для некоторых тел (тела считаются однородными, m – масса тела).
|
Тело |
Положение оси вращения |
Момент инерции |
|
Полый тонкостенный цилиндр, обруч радиусом R |
Ось симметрии |
|
|
Сплошной цилиндр (диск) радиусом R |
Ось симметрии |
|
|
Прямой
тонкий стержень длиной
|
Ось перпендикулярна стержню и проходит через его середину |
|
|
Ось перпендикулярна стержню и проходит через его конец |
| |
|
Шар радиусом R
|
Ось проходит через центр шара |
|
Таблица 1.2.1
Если тело имеет сложную форму, и теоретически определить момент инерции его сложно, прибегают к экспериментальным методам определения момента инерции.
1.3 Кинетическая энергия вращения
Рассмотрим
абсолютно твёрдое тело, вращающееся
около неподвижной оси z,
проходящей через него (рис. 1.3.1). Мысленно
разобьём это тело на маленькие объёмы
с элементарными массами
![]() ,
,
![]() ,...,
,...,
![]() ,
находящиеся на расстоянии
,
находящиеся на расстоянии
![]() ,
,![]() ,...,
,...,![]() от оси вращения. При вращении твёрдого
тела относительно неподвижной оси
отдельные его элементарные объёмы
массами
от оси вращения. При вращении твёрдого
тела относительно неподвижной оси
отдельные его элементарные объёмы
массами![]() опишут окружности различных радиусов
опишут окружности различных радиусов![]() и имеют различные линейные скорости
и имеют различные линейные скорости![]() .
Но так как мы рассматриваем абсолютно
твёрдое тело, то угловая скорость
вращения этих объёмов одинакова:
.
Но так как мы рассматриваем абсолютно
твёрдое тело, то угловая скорость
вращения этих объёмов одинакова:
![]() (1.3.1)
(1.3.1)
Кинетическую энергию вращающегося тела найдём как сумму кинетических энергий его элементарных объёмов:
 .
.
Используя выражение (1.3.1), получим:
Рис. 1.3.1

 , (1.3.2)
, (1.3.2)
где
![]() – момент инерции тела относительно осиz.
– момент инерции тела относительно осиz.
Из
сравнения формулы (1.3.2) с выражением для
кинетической энергии тела, движущегося
поступательно
![]()
 ,
следует, что момент инерцииI
вращательного движения – мера
инертности тела
во вращательном движении, т.е. является
вращательным аналогом массы.
,
следует, что момент инерцииI
вращательного движения – мера
инертности тела
во вращательном движении, т.е. является
вращательным аналогом массы.
В случае, когда тело совершает одновременно поступательное и вращательное движение (например, шар катится по плоскости), его кинетическая энергия равна сумме кинетических энергий поступательного и вращательного движений:

![]()
1.4 Момент силы. Основной закон динамики вращательного движения твёрдого тела
Моментом
силы
![]() относительно неподвижной точкиO
называется векторная физическая
величина, определяемая векторным
произведением радиус-вектора
относительно неподвижной точкиO
называется векторная физическая
величина, определяемая векторным
произведением радиус-вектора
![]() ,
проведённого из точкиO
в точку A
приложения силы, на силу
,
проведённого из точкиO
в точку A
приложения силы, на силу
![]() (рис. 1.4.1):
(рис. 1.4.1):
![]() (1.4.1)
(1.4.1)
Здесь
![]() – псевдовектор, его направление совпадает
с направлением движения правого винта
при его вращении от
– псевдовектор, его направление совпадает
с направлением движения правого винта
при его вращении от![]() к
к![]() .
.
Модуль момента силы
Рис. 1.4.1
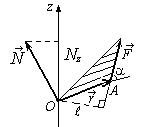
![]() ,
,
где
![]() – угол между
– угол между![]() и
и![]() ,
,![]() – кратчайшее расстояние между линией
действия силы и точкойО
– плечо силы.
– кратчайшее расстояние между линией
действия силы и точкойО
– плечо силы.
Моментом
силы относительно неподвижной оси z
называется скалярная величина
![]() ,
равная проекции на эту ось вектора
,
равная проекции на эту ось вектора![]() момента
силы, определённого относительно
произвольной точкиO
данной оси z
(рис. 1.4.1).
момента
силы, определённого относительно
произвольной точкиO
данной оси z
(рис. 1.4.1).
Работа при вращении тела равна произведению момента действующей силы на угол поворота:
![]() .
.
С другой стороны эта работа идёт на увеличение его кинетической энергии:
![]() ,
но
,
но
 ,
поэтому
,
поэтому
![]() ,
или
,
или
 .
.
Учитывая,
что
![]() ,
получим
,
получим
![]() .
(1.4.2)
.
(1.4.2)
Получили основное уравнение динамики вращательного движения твёрдого тела относительно неподвижной оси: момент внешних сил, действующих на тело, равен произведению момента инерции тела на угловое ускорение.
Можно показать, что если ось вращения совпадает с главной осью инерции, проходящей через центр масс, то имеет место векторное равенство:
![]()
![]() ,
,
где I– главный момент инерции тела (момент инерции относительно главной оси).