

2.2. Двигатель постоянного тока независимого возбуждения (дпт-нв)
Обмотки возбуждения и якоря этого двигателя питаются от разных источников (рис. 2.3,а). Где UB и IB – напряжение источника питания и ток обмотки возбуждения; U и IЯ – напряжение источника питания и ток якоря. Функцию обмотки возбуждения у таких двигателей может выполнять и постоянный магнит (рис. 2.3,б).
Д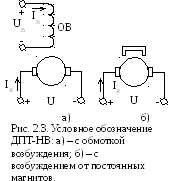 ля
двигателя с независимым возбуждением
величинаСМ
Ф =
const,
поэтому вид электромеханической и
механической характеристики в соответствии
с (2.4) и (2.5) будет один и тот же (рис. 2.3).
ля
двигателя с независимым возбуждением
величинаСМ
Ф =
const,
поэтому вид электромеханической и
механической характеристики в соответствии
с (2.4) и (2.5) будет один и тот же (рис. 2.3).
Характерные точки характеристик
1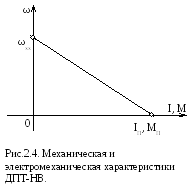 .
ПриIЯ
= 0 и М
= 0; ω
= ωхх
(ωхх
– скорость
холостого хода двигателя). В режиме
холостого хода механическая нагрузка
на валу двигателя отсутствует.
.
ПриIЯ
= 0 и М
= 0; ω
= ωхх
(ωхх
– скорость
холостого хода двигателя). В режиме
холостого хода механическая нагрузка
на валу двигателя отсутствует.
2. При ω = 0; IЯ = IП и М = МП (IП и МП – пусковой ток и пусковой момент двигателя). В литературе их иногда называют как IКЗ и МКЗ (током и моментом короткого замыкания), т.к. режим короткого замыкания для электродвигателя соответствует неподвижному состоянию якоря, а не замыканию его электрических цепей между собой или на корпус.
2.2.1. Регулирование частоты вращения двигателя постоянного тока независимого возбуждения
Основное преимущество двигателей постоянного тока перед двигателями переменного тока – это относительная легкость регулирования частоты вращения. Известно несколько способов регулирования скорости, которые можно получить из анализа зависимостей (2.4) или (2.5). Регулирование осуществляют: путем изменения сопротивления обмотки якоря, точнее включением последовательно с ней добавочного сопротивления; изменением потока возбуждения или напряжения питания якоря.
Первый способ отличают небольшие затраты на его осуществление, но при эксплуатации, из-за больших потерь мощности на добавочном сопротивлении, его целесообразно применять только для маломощных двигателей и там, где не предъявляется больших требований к стабильности скорости, т.к. этот способ снижает жесткость механической характеристики двигателя.
Н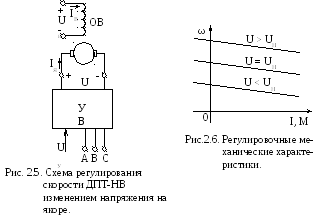 а
практике изменение магнитного потока
возбуждения возможно только в сторону
его уменьшения, т.к. при увеличении
потока, требуется повысить ток возбуждения
выше номинального, что приведет к
перегреву обмотки возбуждения и двигателя
в целом. Кроме того, двигатель рассчитан
и сконструирован так, что его магнитная
система близка к насыщению, поэтому
увеличение тока возбуждения не приведет
к заметному росту потока возбуждения.
Однако, уменьшение потока возбуждения
из (2.4) приводит к росту скорости двигателя.
На практике же в большинстве случаев
требуется ее снижать, что в данном
способе невозможно.
а
практике изменение магнитного потока
возбуждения возможно только в сторону
его уменьшения, т.к. при увеличении
потока, требуется повысить ток возбуждения
выше номинального, что приведет к
перегреву обмотки возбуждения и двигателя
в целом. Кроме того, двигатель рассчитан
и сконструирован так, что его магнитная
система близка к насыщению, поэтому
увеличение тока возбуждения не приведет
к заметному росту потока возбуждения.
Однако, уменьшение потока возбуждения
из (2.4) приводит к росту скорости двигателя.
На практике же в большинстве случаев
требуется ее снижать, что в данном
способе невозможно.
Поэтому лучшим способом является регулирование скорости путем изменения напряжения питания якоря. В этом способе якорь двигателя подключают к регулируемому источнику постоянного тока, в качестве которого обычно служит управляемый выпрямитель УВ рис. 2.5. Управляемый выпрямитель обычно питается переменным трехфазным напряжением. Величиной выходного постоянного напряжения U управляют, например, путем изменения величины управляющего напряжения UУ, что может осуществлять оператор или система автоматического регулирования. Регулировочные механические характеристики при этом имеют вид, показанный на рис. 2.6. Они имеют вид прямых с одинаковым наклоном к оси абсцисс, т.е. жесткость (наклон) характеристики не меняется с изменением скорости вращения.
Реверс двигателя (изменение направления вращения якоря) осуществляют, меняя полярность источника питания якорной цепи или цепи возбуждения.