

Министерство образования и науки Российской Федерации
Казанский государственный технический университет им. А.Н.Туполева
________________________________________________________________
Кафедра автоматики и управления
Пояснительная записка к курсовой работе
по дисциплине "ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ"
на тему
Следящая система (схема д 1111).
Выполнил студент группы 3313 ________________ Идиятов Б.М.
(подпись) (Фамилия И.О.)
Руководитель _________________ Колчин А.В.___
(должность, подпись) (Фамилия И.О.)
Оценка _____________
___________ _________________
(подпись) (Фамилия И.О.)
Казань, 2010
Содержание.
1. Введение. 3
2.Расчет САУ в линейном приближении. 7
2.1 Вывод уравнений и определение передаточных функций функциональных элементов. 7
2.1.1 Генератор постоянного тока. 7
2.1.2 Определение параметров электромашинного усилителя 9
2.1.3 Определение параметров двигателя постоянного тока 10
2.1.4 Определение параметров делителя напряжения. 12
2.2 Структурная схема САУ. 13
2.3 Передаточные функции разомкнутой и замкнутой системы. 14
2.4 Определение коэффициента усиления по заданным условиям точности в установившемся режиме. 18
2.5 Исследование статических свойств замкнутой системы. 19
2.6 Исследование динамических свойств замкнутой системы с найденным коэффициентом усиления электронного усилителя. 23
2.6.1 Построение области устойчивости по коэффициенту усиления электронного усилителя. 23
2.7 Синтез непрерывного корректирующего устройства. 37
2.8 Приближенный синтез дискретного корректирующего устройства 46
1. Введение.2
2. Расчет САУ в линейном приближении.6
2.1 Вывод уравнений и определение передаточных функций функциональных элементов. 6
2.1.1 Генератор постоянного тока. 6
2.1.2 Определение параметров электромашинного усилителя 7
2.1.3 Определение параметров двигателя постоянного тока 8
2.1.4 Определение параметров делителя напряжения. 9
2.2 Структурная схема САУ. 10
2.3 Передаточные функции разомкнутой и замкнутой системы. 11
2.4 Определение коэффициента усиления по заданным условиям точности в установившемся режиме. 14
2.5 Исследование статических свойств замкнутой системы. 15
2.6 Исследование динамических свойств замкнутой системы с найденным коэффициентом усиления электронного усилителя. 18
2.6.1 Построение области устойчивости по коэффициенту усиления электронного усилителя. 18
2.7 Синтез непрерывного корректирующего устройства. 28
2.8 Приближенный синтез дискретного корректирующего устройства 35
1. Введение.
Схема следящей
системы представлена на рис.1.
В схеме приняты следующие обозначения:
МД– механический дифференциал исполняет роль устройства вычитания механических сигналов (угловых перемещений);
П– потенциометр является устройством, на концах которого возникает разность потенциалов, пропорциональная угловому перемещению своей стрелки;
ЭУ– электронный усилитель, на выходе которого возникает разность потенциалов, пропорциональная разности потенциалов на входе;
ОВГ– обмотка возбуждения генератора, на вход подается напряжение и на выходе возникает магнитный поток;
Г– генератор, получая магнитный поток сОВГ, генерирует напряжение пропорциональное потоку;
Д– двигатель, якорь которого соединен с якорем генератораГ, вал которого вращается в зависимости от поданного на якорь напряжения и момента на валу;
ТГ– тахогенератор, вал которого соединен с валом двигателя, генерирует напряжение в зависимости от угла поворота вала двигателя;
ПЛ– платформа, управляемый объект.
Номинальные данные машин приведены в таблице 1.
Таблица 1.
|
Элемент системы |
кВт |
В |
А |
А |
рад/с |
кгм2 |
Ом |
Ом |
Гн |
|
Двигатель |
500 |
625 |
800 |
- |
83,8 |
360 |
0,025 |
- |
- |
|
Генератор |
660 |
725 |
915 |
45 |
- |
- |
0,030 |
8 |
6 |
|
ЭМУ |
10 |
200 |
50 |
0,04 |
- |
- |
0,2 |
35,0 |
2,0 |






Коэффициенты
передачи дифференциала и потенциометра
соответственно равны
 =1,
=1, =114,6
в/град.
=114,6
в/град.
Параметры делителя напряжения R1 =1кОм,R2 =0,02 кОм.
Момент нагрузки,
действующий на платформу, равен
 = 2000 Н·м.
= 2000 Н·м.
Передаточные
отношения редуктора
 и платформы
и платформы соответственно равныip
=100,iпл=0,01.
соответственно равныip
=100,iпл=0,01.
Требуемые показатели точности и качества приведены в таблице 2.
Таблица 2.
|
Время регулирования
|
Перерегулирование
|
Статическая ошибка |
Скоростная ошибка |
|
2 |
30 |
0,008 рад
(по отношению к
|
0,0004 рад (по отношению к
|
 ,
с
,
с ,%
,% =2000
Н·м)
=2000
Н·м) рад)
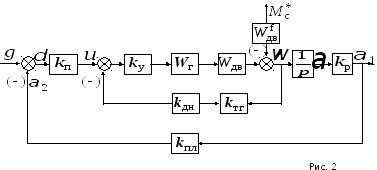
рад)Структурная схема системы приведена на рисунке 2:
На вход системы
подается команда
 ,
изменяющаяся по произвольному закону
,
изменяющаяся по произвольному закону .Угол
.Угол должен повторяться на платформе -
управляемом объекте. Мощность, требуемая
для вращения командной оси, сравнительно
мала, так как с командной осью сцеплен
только движок
должен повторяться на платформе -
управляемом объекте. Мощность, требуемая
для вращения командной оси, сравнительно
мала, так как с командной осью сцеплен
только движок
потенциометра П. Мощность, которую может потреблять для своего вращения управляемый объект, значительно выше. Она обеспечивается установкой двигателяДсоответствующей номинальной мощности.
Сравнение углов
поворота командной и выходной осей
осуществляется через отрицательную
обратную связь ООС,с помощью
механического дифференциалаМД.МДпроизводит вычитание угловых перемещений,
эта разность (рассогласование) подаётся
на входП, где происходит преобразование
механического сигнала в электрический.
Благодаря местной обратной связи
возникает разность напряжений
рассогласования, которое поступает на
вход электронного усилителяУ. Далее
усиленный сигнал после прохождения
черезУ подводится к обмотке
возбуждения генератораОВГ. Якорь
генератораГ соединен с якорем
двигателяД, обмотка возбуждения
которого (ОВД) подключена к постоянному
напряжению. В результате при появлении
рассогласования двигатель начинает
вращаться в сторону уменьшения ошибки
до согласования двух осей. Задающим
воздействием здесь является угол
поворота .
В качестве возмущающего воздействия
рассмотрим момент нагрузки
.
В качестве возмущающего воздействия
рассмотрим момент нагрузки на оси управляемого объекта.
на оси управляемого объекта.
Предположим, что
по отношению к входному сигналу
 и при отсутствии нагрузки система
является астатической, т.е. в установившемся
режиме рассогласование
и при отсутствии нагрузки система
является астатической, т.е. в установившемся
режиме рассогласование равно нулю. Тогда на выходе усилителя
напряжение отсутствует и на двигатель
напряжение не поступает, и ротор
неподвижен. В этом случае рассогласование
равно нулю. Тогда на выходе усилителя
напряжение отсутствует и на двигатель
напряжение не поступает, и ротор
неподвижен. В этом случае рассогласование между входным сигналом
между входным сигналом и нулевым углом поворота платформы
и нулевым углом поворота платформы равно
равно ,
т.е. не равно нулю, что противоречит
исходному предположению. Тем самым
рассогласование в установившемся режиме
не равно нулю и система является
статической по отношению к входному
сигналу
,
т.е. не равно нулю, что противоречит
исходному предположению. Тем самым
рассогласование в установившемся режиме
не равно нулю и система является
статической по отношению к входному
сигналу .
.