

Лекции
.pdf
|
|
|
|
|
|
|
m1 U |
2 |
r ' |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|||
M эм = |
|
|
|
|
|
|
|
|
2 |
|
S |
|
|
|
2 |
, Н м. |
|
(2.78) |
|||
|
f |
|
|
|
|
' |
|
|
|
|
|
|
|||||||||
2 π |
|
|
|
|
|
|
|
' |
|
|
|
|
|||||||||
|
r1 + |
r2 |
|
+ (X p1 |
+ |
|
|
|
|
|
|
|
|||||||||
|
p |
|
|
S |
|
X p 2 ) |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При S→0 значение r'2/S велико, |
|
тогда другими членами уравнения |
в |
||||||||||||||||||
квадратных скобках можно пренебречь и формула упрощается: |
|
|
|
||||||||||||||||||
p m U |
2 |
|
r' |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Mэм ≈ |
1 |
|
1 |
' |
S |
= |
p m1 U1 S . |
|
|
|
|
|
|
|
(2.79) |
||||||
|
|
|
2 |
|
|
2π f r2' |
|
|
|
|
|
|
|
|
|||||||
2π f |
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Это уравнение прямой линии, проходящей через начало координат. |
|
|
|||||||||||||||||||
Если S→1, то значение r'2/S мало и им можно в знаменателе пренебречь, |
|||||||||||||||||||||
формула приобретает вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
m |
U |
2 |
|
r' |
|
|
|
|
|
|
|
|
2 |
' |
|
|
|
||
|
|
|
2 |
|
|
|
|
|
|
p m1 |
|
|
|
||||||||
|
|
|
|
1 |
|
1 |
|
S |
|
|
)2 ]= |
|
|
|
U1 |
r2 |
]S . |
|
|
||
Mэм ≈ 2π |
f |
[(r1 )2 +(X p1 + Xp2' |
2π f [(r1 )2 + |
(X p1 + Xp2' )2 |
(2.80) |
||||||||||||||||
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
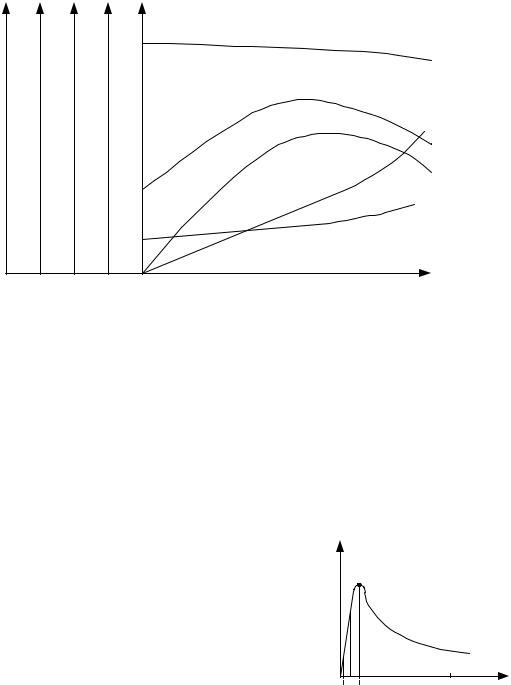
А это – уравнение гиперболы. Прямую и гиперболу можно рассматривать |
|||||||||||||||||||||
как асимптоты, к которым стремится механическая характеристика (рис .2.20). |
|
||||||||||||||||||||
Генераторный |
|
|
|
|
|
|
|
Двигательный |
|
|
Режим |
|
|
||||||||
|
|
|
|
|
|
|
|
электромагнитного |
|
|
|||||||||||
режим |
|
|
|
|
|
Мэм |
|
|
режим |
|
|
|
тормоза |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
r'2+r'р1 |
|
r'2+r'р2 |
r'р2>r'р1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Мк |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
С' |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆Mп2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
С |
|
|
∆Mп |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Мн |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Мп |
|
|
М |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-1 |
|
|
|
|
|
|
|
О |
|
|
|
|
|
|
|
|
|
п1 |
|
|
|
|
|
|
|
|
|
|
Sн Sк |
|
S'к |
|
1 |
|
|
S |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.20. Механическая характеристика АД |
|
|
|
|||||||||||||||
61

При S = 1 n2 = 0, тогда электромагнитный момент Мэм при неподвижном роторе можно назвать пусковым моментом Мп. Максимальный электромагнитный момент Мэм называется критическим моментом Мк, а соответствующее ему скольжение – критическим скольжением Sк.
Пусть к валу приложен момент сопротивления Мс = const. Тогда ∆Мп – избыточный пусковой момент, под действием которого происходит раскрутка ротора из точки А через точку В в точку С. В точке С двигатель будет длительно работать, развивая номинальный момент Мн = Мс. Номинальному моменту соответствует номинальное скольжение Sн. Как видно из механической характери-
стики Sк > Sн, обычно Sк = 0,08÷0,25.
Часть механической характеристики DВ называется устойчивой частью механической характеристики. Для нее выполняется условие:
dM |
> 0. |
(2.81) |
dS |
|
|
Покажем это. Пусть под действием возросшего момента сопротивления скорость вращения ротора уменьшилась. Следовательно, скольжение увеличится и рабочая точка окажется правее исходной (точка С' на механической характеристике). Если внешнее воздействие исчезнет, то под действием увеличенного вращающего момента ротор увеличит частоту вращения, скольжение уменьшится и произойдет переход снова в точку С.
Участок АВ является неустойчивым участком механической характеристики, для него выполняется условие:
dM |
< 0 . |
(2.82) |
|
dS |
|||
|
|
Если под действием внешнего воздействия рабочая точка оказалась правее точки В, то вращающий момент уменьшится и произойдет лавинообразный спад скорости до полной остановки двигателя.
Величина критического скольжения Sк увеличивается с ростом активного сопротивления роторной цепи r'2. Ее можно получить из dMэм /dS=0.
Sк = |
r' |
|
|
→или→ Sк = |
r2' +rp' |
. |
|
|||
|
2 |
|
|
|
|
|
(2.83) |
|||
+(X |
|
+ X ' |
)2 |
+(X |
|
+ X ' |
||||
r2 |
p1 |
r2 |
p1 |
)2 |
|
|||||
1 |
|
p2 |
|
1 |
|
p2 |
|
|
||
Если для фазного ротора первое выражение для Sк подставить в формулу для электромагнитного момента Мэм, то сопротивление r'2 сократится и полученный критический момент не будет зависеть от r'2, поэтому с введением реостата r'р в цепь фазного ротора значение Мк не изменяется (рис. 2.20).
Из пунктирной механической характеристики видно, что введение реостата смещает механическую характеристику в сторону больших скольжений и при этом увеличивает пусковой момент Мп (Мп1 > Мп). Введение дополнительного сопротивления в цепь ротора, естественно, уменьшает роторный ток и, следовательно, весь потребляемый ток двигателя, так как
62

' |
|
|
|
|
E 2' |
|
|
|
|
|
' |
|
|
I 2 |
= |
|
|
|
|
|
|
|
→ |
I 1 = |
I 0 − |
I 2 . |
(2.84) |
|
' |
+ |
' |
|
|
|
|||||||
|
|
|
r2 |
rp |
+ |
jX p' |
2 |
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Физически увеличение пускового момента можно объяснить следующим образом. С введением реостата ток ротора уменьшается, но его активная составляющая из-за уменьшения угла ψ2 увеличивается, а вращающий момент определяется активной составляющей роторного тока. Это видно из зависимости:
|
X |
' |
|
|
|
|
tg ψ 2 = |
|
|
p 2 |
|
↓ → ↓ ψ 2 → ↑ cos ψ 2 . |
(2.85) |
' |
|
|
' |
|||
|
r2 |
+ rp |
|
|||
Если сопротивление реостата слишком большое, то произойдет уменьшение активной составляющей роторного тока и пусковой момент уменьшится, при этом значение критического скольжения Sк будет больше единицы (Sк >1).
Для асинхронных двигателей кратность пускового момента к номинальному обычно составляет Кп = Мп/Мн =1,2÷1,5 .
КМ = Мк/Мн = 2,5÷3,5 – перегрузочная способность АД.
При нормальной работе АД и изменяющейся нагрузке рабочая точка С будет перемещаться по устойчивому участку ОВ, во время чего будет изменяться ток, потребляемый АД: при уменьшении частоты вращения он возрастает и тепловой режим двигателя ухудшается, а с ростом частоты вращения – наоборот.
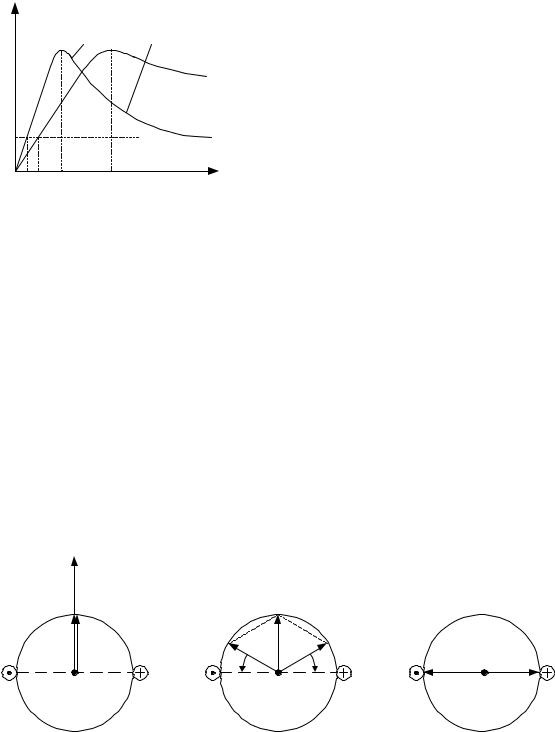
Режим работы АД в диапазоне скольжений 0 < S <1 – двигательный. При S >1 – режим электромагнитного тормоза, при S < 0 – генераторный режим.
На рис. 2.21 условно изображены все режимы:
Двигательный |
Режим |
Генераторный |
режим |
электромагнитного |
режим |
|
тормоза |
|
n1 |
|
n1 |
n1 |
n2 |
n2 |
|
n2 |
Mэм |
|
Mэм |
Mэм |
0<S<1 |
S>1 |
|
S<0 |
Рис. 2.21. Направления вращения магнитного потока статора, вращения ротора
иэлектромагнитного момента АД при различных режимах работы
Врежиме электромагнитного тормоза электромагнитный момент Мэм действует против вращения ротора n2, поэтому получается торможение. Данный режим может иметь место, когда вращение ротора под действием внешнего на-
63

грузочного момента происходит в сторону, обратную вращению магнитного потока.
Генераторный режим может возникнуть, если под действием внешнего момента скорость вращения ротора превысит скорость вращения магнитного потока. Тогда по правилу правой руки изменяется направление ЭДС и, соответственно, тока в роторе, изменяется направление электромагнитного момента и этот момент становится тормозным. При этом двигатель отдает в сеть активную энергию, беря из сети намагничивающую составляющую тока для создания магнитного потока. Такой режим называется режимом генераторного торможения с возвратом энергии в сеть. Двигательный режим с обеих сторон ограничен тормозными режимами, что широко используется в подъемно-транспортном оборудовании.
2.10. ПУСК, РЕВЕРС, РАБОЧИЕ ХАРАКТЕРИСТИКИ АД
При пуске АД потребляет большой ток (5÷10)Iн. В момент пуска ротор неподвижен. Магнитный поток вращается относительно ротора со скоростью
A |
B |
C |
n1, т.е. быстро. Согласно уравнению (2.38) в ро- |
|
торе индуктируется большая ЭДС, следовательно, |
||||
|
|
|
||
|
|
|
протекает большой роторный ток и двигатель по- |
|
|
|
|
требляет большой ток из сети (2.84). В некоторых |
|
|
|
|
случаях сеть не выдерживает большие пусковые |
|
|
|
|
токи. Для ограничения пускового тока применя- |
|
|
|
|
ют следующие способы пуска с помощью: |
а) автотрансформатора (рис. 2.22);
|
|
к АД |
б) |
|
реакторов, |
|
|
|
|
|
|
|
A |
B |
C |
||
Рис.2.22. Схема пуска АД |
включенных |
последова- |
||||||
с помощью автотрансформа- тельно с |
АД |
(дроссели) |
|
|
|
|||
|
тора |
|
(рис.2.23); |
|
|
|
|
|
треугольника на звезду; |
в) |
переключения с |
|
|
|
|||
|
|
|
|
|
|
|||
|
г) пускового реостата, включаемого в цепь фаз- |
|
к АД |
|
||||
|
|
|
|
|
|
|
|
|
ного ротора. |
|
Способы а), б), в) со- |
Рис.2.23. Схема пуска АД |
|||||
A |
B |
C |
с помощью дросселей |
|||||
ответствуют |
уменьшению |
|
|
|
||||
|
|
|
|
|
|
|||
|
|
|
напряжения питания, подаваемого на двигатель при |
|||||
|
|
|
пуске. Основной недостаток этих способов – это |
|||||
|
|
|
уменьшение пускового момента, который пропорцио- |
|||||
|
n2 |
|
нален квадрату напряжения. Так, если уменьшить на- |
|||||
|
|
пряжение питания на 30%, то пусковой момент умень- |
||||||
|
|
|
шится на 70%. |
|
|
|
|
|
|
|
|
Наилучший способ пуска это способ г), но он |
|||||
Рис. 2.24. Схема реверса АД |
осуществим только для двигателей с фазным рото- |
|||||||
|
|
|
ром. |
|
|
|
|
|
64
Реверс – это изменение направления вращения ротора. Для реверса нужно |
|||||||||
изменить направление вращения магнитного потока статора, а для этого в трех- |
|||||||||
фазных АД необходимо поменять местами два любых провода двигателя на |
|||||||||
клеммах трехфазной сети (рис. 2.24). |
|
|
|
|
|||||
Направление вращения магнитного потока и соответственно ротора про- |
|||||||||
исходит в сторону чередования фаз А, В, С (в сторону нарастания положитель- |
|||||||||
ного угла α при рассмотрении МДС статорной обмотки). |
|
|
|||||||
Рабочие характеристики – это зависимости I1, |
n2, M2, |
η, cos ϕ1 |
от Р2 |
||||||
(рис. 2.25). |
|
|
|
|
|
|
|
|
|
cosϕ1 |
η |
M |
n2 |
I1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
M2 |
|
|
|
|
|
|
|
|
|
cosϕ1 |
|
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|
|
I1хх |
|
|
|
|
||
|
|
|
|
0 |
|
|
Р2 |
|
|
|
|
|
Рис. 2.25. Рабочие характеристики АД |
|
|
||||
Если двигатель нагружен внешними моментами трения, то при экспери- |
|||||||||
ментальном исследовании можно получить только некоторый участок рабочих |
|||||||||
характеристик. Особенно это свойственно для двигателей малой мощности. |
|||||||||
Комментарий. |
|
|
|
|
|
|
|||
Зависимость n2(Р2) жесткая, скорость уменьшается очень мало. Это обу- |
|||||||||
словлено тем, что рабочий участок механической характеристики ОВ очень |
|||||||||
крутой (рис.2.26), поэтому |
с увеличением момента М2, а следовательно и мощ- |
||||||||
ности на валу Р2, скольжение изменяется очень мало: от Sхх до Sк (рис. 2.26). |
|||||||||
В режиме холостого хода, когда Р2 = 0, |
Мэм |
|
|
||||||
потребляемый ток I1 = I1хх – это ток холостого |
|
|
|||||||
хода. Он идет на покрытие потерь в обмотках, в |
|
B |
|
|
|||||
стали и на создание вращающего момента, пре- |
|
|
|
|
|||||
одолевающего моменты трения в подшипниках |
|
|
|
|
|||||
и о воздух. |
|
|
|
|
|
|
|
|
|
Зависимость cos ϕ1 идет не с нуля, потому |
0 |
|
|
|
|||||
что Т-образная схема замещения содержит ак- |
Sхх |
Sк |
1 |
S |
|||||
тивные и индуктивные сопротивления, а |
|||||||||
|
|
|
|
||||||
Рис. 2.26. Пределы изменения скольжения АД
65

cos ϕ1 |
= |
rэкв |
, |
(2.86) |
|
||||
|
|
zэкв |
|
|
zэкв = |
rэ2кв + X экв2 , |
(2.87) |
||
где rэкв, Xэкв, zэкв – эквивалентные сопротивления схемы замещения. Зависимость момента М2 от Р2 почти линейная, потому что n2 , как уже
говорилось выше, от Р2 изменяется очень мало, следовательно n2, а значит и ω2 в формуле (2.68) можно считать почти const.
При холостом ходе Р1 ≠ 0, т.к. двигатель потребляет энергию, а Р2 = 0, т.е. КПД также равен нулю в соответствии с (2.70). Таким образом, зависимость КПД от Р2 начинается с нуля и с ростом мощности на валу достигает максимума, а при дальнейшем росте Р2 КПД уменьшается за счет более сильного возрастания тока и мощности потерь в обмотках.
2.11. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ТРЕХФАЗНОГО АД
Если посмотреть на формулу частоты вращения магнитного потока (2.28), то видно, что частоту n1 можно регулировать изменением р – пар полюсов и f – частоты питающего напряжения.
Если посмотреть на формулу электромагнитного момента Мэм (2.78), то, очевидно, что вращающий момент и, следовательно, частоту вращения ротора можно регулировать при изменении: напряжения питания U1 , и включении реостата в цепь фазного ротора.
1) Регулирование частоты вращения ротора при изменении пар полюсов. Изменение числа пар плюсов р статорной обмотки можно осуществлять при изменении схемы соединения полюсных групп катушек. Рассмотрим для примера только одну фазу (рис. 2.27).
N |
|
N |
|
I |
|
I |
I |
S |
|
S |
|
П |
I |
П |
|
||
S |
|
N |
p =1 |
|
p = 2 |
Рис.2.27. Увеличение числа полюсов АД путем изменения схемы соединения полюсных групп катушек
66

При параллельном соединении катушек фаза дает одну пару полюсов (р=1), а при последовательном соединении у каждой фазы получается две пары полюсов (р=2).
Промышленностью выпускаются двух- и трехскоростные АД с соответствующей коммутацией фазных катушек. В лифтовых АД в пазы статора укладываются две отдельные трехфазные обмотки с разным числом пар полюсов р. Например, одна с р=6, другая с р=24. Обмотка с р=6 называется обмоткой большой скорости, с р=24 – обмоткой малой скорости.
Работает лифтовой двигатель следующим образом. При нажатии в кабине кнопки приказа включается обмотка большой скорости и с помощью лебедки кабина перемещается на требуемый этаж с большой скоростью. При подходе к нужному этажу, этажный переключатель выключает обмотку большой скорости и включает обмотку малой скорости. Двигатель входит в режим генераторного торможения. Происходит интенсивное торможение двигателя, двигатель на малой скорости подходит к этажу и обмотка малой скорости выключается.
2) Регулирование частоты вращения ротора при изменении частоты питающего напряжения.
Известно, что
U1 ≈ E1 = 4,44 W1 Kоб f Фm .
Для того, чтобы при изменении частоты магнитный поток двигателя оставался неизменным, нужно одновременно с частотой изменять напряжение питания так, чтобы U1/f1 = const. Тогда сохранится критический момент и жесткость (наклон) рабочего участка механической характеристики (рис.2.28).
При частоте питающего напряжения f1 скорость вращения ротора согласно формуле (2.35) будет:
n2 = n1 (1− Sн ), |
(2.89) |
(2.88)
M2 |
f |
0,5 f |
Мс=М2н 
|
Sн |
S'н |
|
|
S |
|
|
||||
0 |
0 |
1 |
|||
Рис.2.28n1. Механические0,5 n1 характеристики0 n2 АД при изменении частоты питающего напряжения
а при частоте f ' = 0,5 f |
|
n'2 = n'1 (1− S'н ), |
(2.90) |
где n'1 = 0,5n1 .
В настоящее время промышленность выпускает тиристорные регуляторы частоты.
3) Регулирование частоты вращения ротора при изменении напряжения питания.
При изменении напряжения U1 изменяется вращающий момент. Диапазон регулирования очень узкий, т.к. рабочий участок механи-
67
M2 |
|
|
|
|
U1 |
|
|
0,9 U1 |
Mс |
|
|
S'н |
|
|
Sн |
Sк |
S |
Рис. 2.29. Механические характеристики АД при изменении напряжения питания
ческой |
характеристики |
жесткий, а сильно уменьшать напряжение питания |
|||
нельзя, поскольку при этом значительно уменьшается пусковой момент (рис. |
|||||
2.29). Частота вращения ротора согласно формуле (2.35) для случаев представ- |
|||||
ленных на рис.2.29 будет: |
|
|
|
||
n2 |
= n1 (1 − S н ), n'2 |
= n1 (1 − S 'н ). |
(2.91) |
||
M2 |
|
|
|
4) Регулирование частоты вращения ро- |
|
|
|
|
тора введением реостата в цепь фазного рото- |
||
|
r2' |
r2'+rp' |
|
||
|
|
ра (рис. 2.30). |
|
||
|
|
|
|
Способ достаточно простой, широко |
|
|
|
|
|
применяется, но доступен только для АД с |
|
|
|
|
|
фазным ротором (n'2 < n2). |
|
Mс |
|
|
|
Наиболее перспективный способ регу- |
|
|
|
|
лирования частоты вращения ротора – это |
||
S'н |
S'к |
|
способ 2) – изменение частоты питающего на- |
||
Sн |
Sк |
S |
пряжения. Его преимущества – широкий диа- |
||
Рис.2.30. Механические характе- |
пазон регулирования, высокий КПД, т.к. нет |
||||
ристики АД при введении реоста- потерь в регулирующих реостатах. |
|
||||
та в цепь фазного ротора |
|
|
|||
2.12. ОДНОФАЗНЫЕ АД
Пусковой момент.
Пусть на статоре расположена однофазная обмотка в виде одной катушки. При подключении ее к сети переменного тока она будет создавать пульсирующую МДС, которую условно можно разложить на две вращающиеся в разные стороны с одинаковой угловой скоростью и одинаковой амплитудой МДС (рис. 2.31).
Пусть в фазе протекает максимальный ток (амплитудное значение Im) (рис. 2.31, а). Направление МДС определим по правилу правого буравчика. Эту МДС можно, как уже говорилось, представить из двух МДС:
f1 = fm = f ' + f ''.
|
f1=fm |
|
|
|
|
|
|
|
|
f1=0,5fm |
|
|
f1=0 |
f'' |
f' |
I1=Im |
f'' f' |
I1=0,5Im |
f'' |
f' |
|
|
|
||||
|
|
ω |
|
ω |
|
I1=0 |
|
a |
|
б |
|
|
в |
Рис. 2.31. Разложение пульсирующей МДС на две составляющие
68
Пусть теперь ток будет равен |
0,5I1 (рис. 2.31, б). Тогда МДС будет в два |
|||||||
раза меньше, т.е. f = 0,5fm . Ее также можно представить в виде двух МДС, скла- |
||||||||
дываемых по правилу параллелограмма. |
|
|
|
|
|
|||
Если ток равен нулю, то f = 0, т.е. |
f1 = f ' + f '' = 0 – МДС направлены в |
|||||||
противоположные стороны (рис. 2.31, в). |
|
|
|
|
|
|||
Таким образом, f ' – это МДС прямого поля, она вращается в прямом на- |
||||||||
правлении, а f '' – МДС обратного поля, она вращается в противоположную сто- |
||||||||
рону. |
|
|
|
|
|
|
|
|
Каждая из этих МДС создает вращающийся магнитный поток, который |
||||||||
индуктирует в роторной обмотке ток. Взаимодействие магнитного потока со |
||||||||
своим роторным током создает механическую характеристику. |
|
|
||||||
Из рис. |
2.32 видно, что ре- |
|
Mэм |
|
|
|
|
|
зультирующая |
механическая |
ха- |
|
|
|
|
|
|
|
|
|
|
|
|
|||
рактеристика проходит через точку |
|
|
|
M'эм |
|
|
||
S = 1 и, следовательно, пусковой |
|
|
|
|
|
|||
момент однофазного АД равен ну- |
|
|
|
Mэм |
|
|
||
лю. Но если раскрутить ротор в ка- |
M =М |
|
|
Sпр |
||||
кую-либо сторону, то сразу появля- |
эм |
с |
|
1 |
2 |
|||
|
0 |
|
||||||
ется момент Мэм ≠ 0 и двигатель |
|
2 |
Sн |
1 |
0 |
Sобр |
||
будет раскручиваться в эту сторону |
|
|
||||||
до скорости, когда Мэм и момент |
|
|
|
|
|
|
||
сопротивления |
Мс сравняются. В |
|
|
|
M'эм |
|
|
|
этой точке номинального режима |
|
|
|
|
|
|||
|
|
|
|
|
|
|||
однофазный двигатель может дли- |
|
|
|
|
|
|
||
тельно работать. |
|
|
|
|
|
|
|
|
Видно, что рабочий участок |
Рис. 2.32. Механические характеристики, соз- |
|||||||
однофазного АД не проходит через |
даваемые МДС прямого и обратного поля, |
|||||||
точку S = 0 и что он расположен |
|
|
и их результирующая |
|
|
|||
правее этой точки. Это означает, что в номинальном режиме однофазный АД |
||||||||
имеет большую величину скольжения, чем трехфазный АД и, следовательно, |
||||||||
больший роторный ток, больший ток потребления, большую мощность потерь в |
||||||||
обмотках и меньший КПД. Использование материалов у однофазного двигателя |
||||||||
также хуже. При одинаковых габаритах номинальная мощность однофазного |
||||||||
двигателя составляет не более 50 – 60% от номи- |
~ U |
|
|
|||||
нальной мощности трехфазного двигателя. |
|
|
|
|
||||
Схема включения однофазного АД. |
|
|
ГО |
|
|
|||
Раскручивать ротор вручную неудобно, по- |
|
ЦВ |
|
|||||
этому на статоре располагают две обмотки: глав- |
|
|
|
|||||
ную (ГО) и пусковую (ПО). |
|
|
|
|
90о |
|
|
|
Главная обмотка занимает 2/3, пусковая – |
|
ПО |
|
|||||
1/3 пазов статора. Пусковая обмотка выполняет- |
|
|
||||||
|
|
|
||||||
ся более тонким проводом, сдвинута по окруж- |
|
|
|
|||||
ности статора относительно главной обмотки на |
Рис. 2.33. Электрическая схема |
|||||||
90 электрических градусов и подключается к се- |
однофазного АД |
|
||||||
ти переменного тока через |
фазосдвигающий |
|
|
|
||||
|
|
|
69 |
|
|
|
|
|

элемент: резистор, индуктивность, конденсатор. Соответственно и однофазный |
||||
АД называется с пусковым сопротивлением, индуктивностью и пусковым кон- |
||||
денсатором. Электрическая схема имеет вид представленный на рис. 2.33, где |
||||
ЦВ – центробежный выключатель (или другой выключатель, типа реле). |
||||
В большинстве случаев для пуска применяется конденсатор. Пусковая |
||||
обмотка при достижении определенной скорости или определенного тока, или |
||||
при истечении некоторого времени отключается. Далее двигатель работает как |
||||
чисто однофазный. Однофазные АД находят широкое применение в бытовой |
||||
технике: холодильниках, стиральных машинах и т.д. |
||||
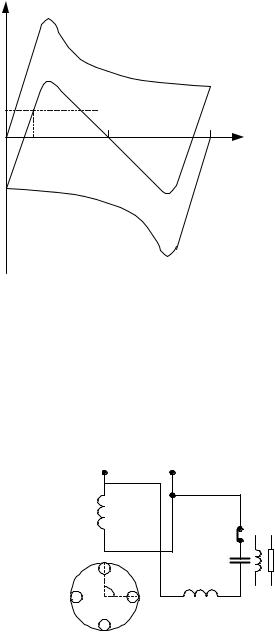
На рис. 2.34 представлена механическая характеристика однофазного АД |
||||
|
B |
|
|
с пусковым конденсатором. |
Mэм |
|
|
Пусковая обмотка работает |
|
|
|
|
||
|
|
|
|
только во время пуска, т.е. корот- |
|
2 |
|
|
кое время, поэтому в ней допуска- |
|
|
A |
|
ют большие плотности тока. |
|
1 |
|
Во время пуска две обмотки |
|
D |
|
|
создают пульсирующие магнитные |
|
C |
|
|
||
Мн |
|
|
|
потоки, сдвинутые в пространстве |
|
|
|
|
и во времени за счет фазосдви- |
0 |
Sн |
1 |
S |
гающих элементов, а это является |
Рис. 2.34. Механическая характеристика од- |
условием образования вращающе- |
|||
нофазного АД с пусковым конденсатором |
гося магнитного потока. Поэтому |
|||
|
|
|
|
пусковой момент становится не |
равным нулю и ротор начинает разгоняться по механической характеристике 2 |
||||
от точки А до точки В. В точке В центробежный выключатель выключает свой |
||||
контакт под действием центробежного усилия от скорости вращения и происхо- |
||||
дит переход |
на механическую характеристику 1. В точке С АД работает как |
|||
чисто однофазный АД, развивая номинальный электромагнитный момент Мн и |
||||
номинальное скольжение Sн. |
|
|
|
|
Конденсаторный АД. |
|
|
|
|
Это двигатель, у которого имеются две обмотки, занимающие по полови- |
||||
не пазов статора, в частном случае совершенно одинаковые. Одна из них под- |
||||
ключается к сети через постоянно включенный конденсатор (рис. 2.35). Конден- |
||||
сатор рассчитывают таким образом, чтобы в номинальном режиме в точке D |
||||
вращающийся магнитный поток был круговым (рис. 2.34). Видно, что в точке D |
||||
номинальное скольжение меньше, потребляемый ток также меньше, следова- |
||||
тельно, меньше мощность потерь и выше КПД, чем у чисто однофазного двига- |
||||
теля, но коэффициент мощности при наличии конденсатора выше, чем у трех- |
||||
фазных двигателей равной мощности. У конденсаторного АД в номинальном |
||||
режиме МДС обоих обмоток одинаковые, но сдвинуты во времени на 90 элек- |
||||
трических градусов. |
|
|
|
|
Пусть одна из обмоток будет обмоткой В, другая, включаемая через кон- |
||||
денсатор, – обмоткой А. Тогда векторная диаграмма токов и напряжений кон- |
||||
денсаторного АД имеет вид, показанный на рис. 2.35. |
||||
70