

3.6. Потенциальная энергия упругой деформации
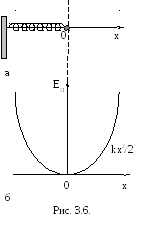
Потенциальной энергией может обладать не только система взаимодействующих тел, но и отдельно взятое упруго деформированное тело. В этом случае потенциальная энергия будет зависеть от степени деформации. Согласно (3.11) для деформации пружины с коэффициентом жесткости kна величину х необходимо совершить работу А = (kх2)/2. Эта работа идет на увеличение потенциальной энергии пружины, которая в соответствии с (3.18) (при условии, что потенциальная энергия недеформированной пружины ЕП0= 0) может быть представлена как
ЕП= (kх2)/2. (3.28)
3.7. Условия равновесия механической системы
Рассмотрим материальную точку, имеющую одну степень свободы, то есть положение, которой определяется одной координатой, например х. Примером такой системы может быть шарик, который свободно без трения перемещается по изогнутой в вертикальной плоскости проволоке (рис. 3.5, а) или закрепленный на пружине шарик, без трения скользящий по горизонтальной направляющей (рис. 3.6, а). Графики потенциальной энергии для этих случаев приведены соответственно на рис. 3.5, б и 3.6, б.
h h0
а
х
ЕП ЕП0
2 Е0
Е1
F F
F
1
0
х3х1х4х2х5х б
Рис. 3.5.
Поскольку трение в обоих случаях отсутствует, результирующая сил, действующих на шарик, будет направлена перпендикулярно скорости и работы совершать не будет. Закон сохранения энергии будет иметь вид:
Е = ЕП+ ЕК=const. (3.29)
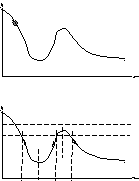
Из уравнения следует, что кинетическая энергия может возрастать только за счет уменьшения потенциальной энергии. Значит, если шарик находится в состоянии с минимальной потенциальной энергией и его скорость при этом равна нулю без внешнего воздействия в движение он придти не может, то есть будет находиться в состоянии равновесия. На рис. 3.5 и 3.6 это соответственно точки х = х1и х = 0. Условие минимума потенциальной энергии имеет видdЕП/dx= 0. В соответствии с (3.23) это значит, чтоFХ= 0. Таким образом, в положении равновесия действующая на шарик сила равна нулю. На рис. 3.5 этому условию удовлетворяет также положение х = х2, однако слева и справа от него на шарик будут действовать силы, стремящиеся удалить шарик от этой точки (FХ = –dEП/dx). В точке х = х1 силы действующие на шарик стремятся вернуть его в исходное положение.
Зная вид потенциальной энергии и значение полной энергии тела можно сделать некоторые заключения о возможном характере его движения. Так если полная энергия тела имеет значение Е1, указанное на рис. 3.5, его движение может происходить на отрезке от х3 до х4 или от х5 до бесконечности. В области от х < x3 и от х4 до х5 частица попасть не может, так как там ее потенциальная энергия там должна быть больше ее полной энергии. Область от х4 <х < х5 носит название потенциального барьера, а от х3 до х4 – потенциальной ямы. При значении полной энергии больше ЕП0 движение по оси х не ограничено.