

1. Возможность дискретного представления непрерывных величин. Квантование по уровню и дискретизации по времени. Осн огран-я, накладываемые на цифровые измерительные устройства со стороны объекта измерений и способом реализации цифрового устройства.
Основными видами ЦИУ являются цифровые измерительные приборы и измерительные АЦП. Цифровым измерительным прибором наз-ют измерительный прибор, автоматически вырабатывающий дискретные сигналы измерительной информации, показания которого представлены в цифровой форме. Под дискретным сигналом понимают сигнал, у кот-го информация заложена не в размере величины, используемой для передачи этой информации, а в соот-щем ей кол-ве сигналов, их взаимном расположении и т.д., причем этот сигнал может иметь только определенное конечное число значений.
Процесс изм-ия может распространяться на 4 основные вида вел-н:
а)непрерывную вел-ну (рис. 1.1,а); б)дискрет-ную вел-ну, непрерывную по знач-ию (рис. 1.1,б); в)квант-ную, непрерывную во времени вел-ну (рис. 1.1,в); г)дискрет-ную и квант-ную вел-ну (рис. 1.1,г).

Под непрерывной величиной x(t) в общем случае следует понимать вел-ну (рис. 1.1а), которая может иметь в заданном диап-не Д бесконечно большое число знач-ий в интервале И времени при бесконечно большом числе моментов времени.
Вел-на может быть непрерывной только по знач-ю или только во времени. Понятию вел-ны, непрерывной во времени, противоположно понятие дискретизированной величины, т. е. вел-ны прерывной во времени, знач-я которой отличны от 0 только в определенные моменты времени. Понятию вел-ны, непрерывной по значению, противоположно понятие, квантованной величины, т е. величины прерывной по знач-ию, которая в заданном диапазоне Д может принимать опр-е конечное число значений.
АЦ преобразование заключается в представлении аналог. инф-ции в цифровой форме в виде отсчетов отнесенных к конкретным знач-ям времени. Это представление включает понятие «дискретность» т.е. какие-то конкретные знач-ия ΔХ, на которое истинное знач-ие Х(t) вход. вел-ны отличается от эквивалентных цифровых отсчетов. Для линейных систем шаг квантования h обычно остается постоянным. Поэтому X=n*ΔX+Δкв. Погреш-ть квантования Δкв всегда меньше ΔX.
При АЦ преобразовании осуществляются практически 2 операции:
1)Дискретизация – понимают преобразование непрерывной во времени величины в дискретизированную путем сохранения ее мгновенных знач-ий только в детерминированные моменты времени (моменты дискрет-ции). Промежуток времени Δt между двумя ближайшими моментами дискрет-ции называют шагом дискрет-ации, он может быть как постоянным (равномерная дискрет-ция), так и переменным (неравн-я дискрет-ция)
2)Квантование – это преобразование непрерывной по размеру величины в квант-ную (рис. 1.1,в) путем замены ее мгновенных значений ближайшими фиксированными знач-ми, ряд которых или совокупность которых образованы по определенному закону с помощью мер. Разность ΔX между двумя ближайшими детерминированными знач-ми называют ступенью квант-ния, в заданном диап-не она может быть как пост-й (равномерное квантование), так у переменной (неравномерное - квантование)
В результате равномерного квантования мгновенное значение непрерывной вел-ны х получим в виде конечного числа n ступеней квантования: х=nΔх=х±Δк, где Δк - погр-сть квант-ния. Максимально возможное значение погр-ти квантования определяется наименьшим значением ступени квант-я: Δкmax= Δхmin=Z=h. Z – цена деления шкалы ЦИП.
Зная диапазон изм-я измеряемой аналог. вел-ны Хmax и кол-во 10-чных разрядов цифр. отсчетного устр-ва mД, можно найти Z =Xmax/10mД.
Погр-сть квантования не должна превышать общую погр-ть преобразования. Поэтому на Z накладывается дополнительное ограничение: Z=ΔX=h≤(δmax*Xmax)/100, δmax-относительная погр-ть преобразования.
Кроме того, ЦИП обладают некоторым порогом нечувствительности. Поэтому ΔX должно удовлетворять неравенству Хнечувтв<ΔX≤(δmaxXmax)/100.
Основные ограничения, накладываемые на цифровые измерительные устройства.Подавляющее больш-во измер-ных сигналов датчиков лежит в пределах от 1мВ до 1МВ. Эти сигналы обычно нормируются до диап-на 0..10В. Далее сиг-лы оцифровываются. Точ-сть представления сиг-лов зависит от разряд-ти используемого АЦП. Влияние помех нужно учитывать на уровне 8-10 разрядов. С-мы с разряд-ю более 12 считаются прецизионными и требуют особого проектирования с учетом э/магнитной обстановки, э/м совместимости. При разряд-ти более 12 оптимальным считается батарейное питание-оно шунтирует через себя и свою ёмкость любые помехи - или использование методов преобразования, не чувствительных к напряжению пульсаций питания(интегрирующие методы преобразования или сигма-дельта АЦП. Разрядность цифровых устройств по цепям питания существенно ограничена пульсациями.
Влияние внешних наводок. Любой вывод МС или какого-то преобразовательного устройства- дискретные R,L,C- представляет собой антенну, на которой может наводится достаточно большое напряжение помехи. Все зависит от мощности ист. излучения, частотного диапазона, длины вывода и наличия дополнительных паразитных пар-ов-L,C. Для устранения этого влияния исп-ся специальные виды экранирования- магнитное и электромагнитное. магнитные экраны не должны иметь отверстий, сам материал экрана должен быть с большой магнитной проницаемостью, наибольшие эффект защиты дают многослойные экраны. Электромагнитные наводки хорошо экранировать тонкими, сетчатыми экранами. Это облегчает их изготовление.
Уровни аналоговых сигналов, которые должны воспринимать датчики могут быть мизерными, поэтому в ряде случаев электронные части приборов разделяют и организуют для них разные аналоговые земли(общие провода). Если создать собственные аналоговые земли и объединить их одним проводом с другой анал землей, то уровень помех будет значительно меньше. Для цифровых устройств уровень собственных помех незначителен. Возникают также импульсные пульсации с f=fд. Для цифровой земли такие импульсные помехи не существенны, для аналоговой -они проникают в практически все сигналы. Для того, чтобы это предотвратить, необходимо разделить цифровые и аналоговые земли и потом их объединить опытным путем.
Для обеспечения качественной синхронизации в цифровых системах обязательно есть ген-р тактовой частоты( обычно кварцеванный). Если частота генерации низкая(100 кГц и ниже), то требования к стабильности частоты такого ген-ра могут быть невысокими. Если тактовая частота системы выше или значительно выше, то кач-во ГОЧ и ГТИ становится принципиальным. Стабилизация частоты опорного ген-ра осущ-ся испол-ем аналоговых автогенераторов со спец методами стабилизации частоты(термостатирование, исп-ие кварцев, исп-ие высокодобротных LC-контуров0. Автоген-ры не имеют фазовой нестабильности, но все методы исп-ся в опред узком диапазоне.(например, гибридный ген-р ГК-131)
2. Теорема Котельникова, следствия из неё и технические приложения. Способы взятия выборок, их достоинства и недостатки. Наложение спектров и его устранение. Апертурная неопределенность.
Академик
В.А.Котельников (далее Кот.)
в 1933г. впервые опубликовал один из
вариантов своей теоремы. Теорема:
любая непрерывная функция х(t),не
имеющая разрывов I
и II
рода(ф. Дирихле), с ограниченным спектром
частот от 0 до fв
может быть определена своими дискретными
значениями (отсчетами), взятыми через
интервалы времени
 .
.
Если сигнал не
удовлетворяет Кот.,
то для определения значения
 вводится
коэффициент запаса. Находится значениеfв
и
вводится
коэффициент запаса. Находится значениеfв
и
 .
Кз=1…25. По К.Шеннону представление ф. по
ее отсчетам может быть наиболее простым
образом выполнено при исп-нии гармонических
ф.,в частности,синусоиды.
.
Кз=1…25. По К.Шеннону представление ф. по
ее отсчетам может быть наиболее простым
образом выполнено при исп-нии гармонических
ф.,в частности,синусоиды.
Замечания к теореме:
1)по В.А.Котельникову и К.Шеннону имеется в виду бесконечный ряд fв→∞, но технически это реализовать нельзя.
2)Дискр-ция обычно осущ-ся различными способами взятия выборок:
а) входная зав-сть прерывается(стробируется) прямоугольными импульсами, в течении кот-х берется отсчет,выборка:
получаем относительно
стабильные значения отсчета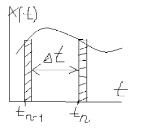
Имеет недостатки:
-не определено точное время взятия выборки
-значение самой выборки есть некоторое усреднение.
Этот мех-м очень просто реализуется.
б) Мех-м взятия отсчетов, когда входным сигналом модулируется посл-сть импульсов произвольной формы.
Этот метод технически
реализовать сложнее(не на много), здесь
точно известны моменты взятия выборок,
но амплитуду отсчетов здесь определить
знач-но сложнее, чем в 1-ом мех-ме (степень
усреднения здесь очень невелика и
влияние случайных помех резко возрастает).
В качестве набора функций чаще всего используется exp, sin, cos, tg.
На практике чаще всего используется кусочно-линейная аппроксимация.
3)Спектр входного сигнала может существенно отличаться от условий по Кот.: может быть линейчатым, иметь разрывы или участки с нулевым значением. В этом случае Кот. в чистом виде не работает и необходимо вводить поправки на неидеальность сигнала(например, коэф-нт запаса).
4)Соотношение для теоремы получено для равномерной дискретизации его нельзя исп-ть при неравномерной.
5)Если требуется не восстанавливать сигнал по его отсчетам, а находить какие-то частные хар-ки сигналов, то критерии определения fд могут существенно менятся.
6)Сама выборка осуществляется с определенной погрешностью, связанной с динамическими хар-ками
7)время выборки по способу а) всегда содержит некоторую постоянную сост-щую(номинальное время выборки) и некоторую случайную сост-щую, кот-ая зависит от технических хар-к ключа, уровней управляющих сигналов, периода ключа и др.
Неидеальность
аппаратуры и наличие в спектрах реальных
сигналов высокочастотных составляющих
с fв требует принципиального ограничения
спектров входного сигнала.
требует принципиального ограничения
спектров входного сигнала.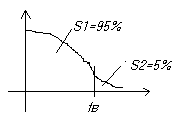
ФНЧ не ниже второго порядка
Эффект наложения спектра:

Наложение спектров недопустимо, необходимо довести частоту до такой, которая исключает наложение частот.
Апертурная погрешность.
В быстродействующих АЦП изменение входного сигнала х(t) за время tпреобр оказывается минимальным, не превышающим h. Однако, если х(t)меняется tпреобр, то цифровой отсчет не будет соот-вать текущему значению х(t). В итоге происходит нарушение условий Th Котельникова, дискретизация получается неравномерной и появл-ся специфическая погр-сть, которая наз-ся апертурной неопределенностью(по ГОСТ-погрешность датирования отсчета). Она носит двоякий характер: ее можно рассматривать как погрешность значения входного сигнала в точно зад. моменты времени, или же как погрешность определения момента времени для точно известного значения отсчета.

Апертурную
погрешность обычно задают временем
tап,
потому как время можно измерить с высокой
точностью, а значение
 измерить очень тяжело.
измерить очень тяжело.
После того, как
сделана выборка, апертурная неопределенность
отсутствует. Δаперт для правильно
спроектированного и работающего
цифрового устройства не м.б.>шага
квантования: Δаперт≤h.
Поэтому на этапе проектирования и
анализа работы устройства крайне
желательно оценить значение tаперт.
Это делается несколькими способами,
например, зная зав-сть x(t)предстваить
ее в виде разлоения в ряд:
 ,
где
,
где .
Основным способом определения
.
Основным способом определения является исп-ие тестового сигнала в
виде синусоиды:
является исп-ие тестового сигнала в
виде синусоиды: ,
где
,
где -амплитудное
значение синусоиды,
-амплитудное
значение синусоиды, -
круговая частота тестового синусоидального
сигнала. Для этого сигнала
-
круговая частота тестового синусоидального
сигнала. Для этого сигнала ,
, ≤h=Δх.
В общем случае, для правильно
спроектированного прибора
≤h=Δх.
В общем случае, для правильно
спроектированного прибора
 ≤Δх.
≤Δх.
Неравенство
К.Шеннона:
 .
По графику определ-сяtаперт
по частоте тестового сигнала fТ:
.
По графику определ-сяtаперт
по частоте тестового сигнала fТ:
Понятием апертурной погрешности нужно пользоваться очень осторожно, детально выясняя все особенности соотношения. Для ее полного устранения необходимо на вход АЦП поставить УВХ. В этом случае аперт неопред у АЦП будет отсутствовать, но появится у УВХ (неоднозначность срабатывания ключей при заряде RCн-цепочки).
3. Системы счисления и коды, используемые в циу. Особенности построения систем счисления, свойства и использование. Отраженные (рефлексные) коды, код Грея, отраженный десятичный код.
При построении ЦИУ используют те же коды что и в ЭВМ. Это объясняется тем, что ЭВМ в различных системах переработки инф-ции работают с АЦП и ЦАП. Как правило, это разновидности натурального двоичного кода, варианты двоично-десятичных кодов, а также код Грея.
Любое число N при некотором k=1..h можно представить в виде:
 ;
;
h-основание системы счисления, i-номер разряда, m-номер старшего разряда числа(кол-во разрядов), а-разрядные коэффициенты(от 0 до h-1). Так описыв-ся позиционные коды.
Вид исполь-ой с-мы
определяется принятым основанием h.
Наиболее привычной формой представления
явл-ся десятичная
(h=10):
 ,
в которой исходная вел-на представляется
числомN
с соседними разрядами отличающимися
друг от друга в 10 раз. Например
1074=1*10^3+0*10^2+7*10^1+4*10^0. Двоичная
система счисления
(h
= 2,в ЦИУ
двоичные числа нормализованы-
ак,i
= 0 или 1).
Такой код называется прямым. Его крайний
правый разряд является младшим, крайний
левый — старшим. Как легко видеть, прямой
код пригоден лишь для работы с однополярными
сиг-ми. Например, 13=1*2^3+1*2^2+0*2^1+1*2^0=1101. Для
представления отрицательных чисел
исп-ют модифицированные коды:
,
в которой исходная вел-на представляется
числомN
с соседними разрядами отличающимися
друг от друга в 10 раз. Например
1074=1*10^3+0*10^2+7*10^1+4*10^0. Двоичная
система счисления
(h
= 2,в ЦИУ
двоичные числа нормализованы-
ак,i
= 0 или 1).
Такой код называется прямым. Его крайний
правый разряд является младшим, крайний
левый — старшим. Как легко видеть, прямой
код пригоден лишь для работы с однополярными
сиг-ми. Например, 13=1*2^3+1*2^2+0*2^1+1*2^0=1101. Для
представления отрицательных чисел
исп-ют модифицированные коды:
Прямой код со знаком предусматривает введение дополн-ого знакового разряда, который явл-ся старшим разрядом и для отриц-ых чисел принимает значение 1, а для положительных 0. Для него характерно двойное представление нуля: положительный нуль 0+ = 0 000 ... 0 и отрицательный 0- = 1 000 ... 0. В остальном код остается без изменений. Он исп-ся в ЦИП, например, в волтметре цифровом универс-м ВК7-10А. Но с таким кодом не удобно работать, если необ-мо совместить ЦИУ и ЭВМ.
Смещенный двоичный код образуется прибавлением к числу постоянной величины 2тдвоичное, в результате чего

При этом максимальный положительный сигнал 1—2 -mдвоичное пред-ся кодом 111 ... 1,макс. отриц-ный сигнал 2-m - кодом 000 ... 1, а нулю соответствует код 100 ... 0. Это код легко реализ-ся, но неудобен при выполнении арифметических операций в ЭВМ, например, сложение 2-х значений смещенного кода, соот-щих одинаковым по абсолютному значению и противоположных по знаку величинам, приведет к образованию на выходе max(по абсл значению) сигнала вместо нулевого.
Дополнительный код образуется вычитанием в двоичной форме преобразуемого числа N из пост вел-ны 2m+1. Другими словами, находится дополнение до двух к числу N ,в результате образование отдельных разрядов в кодовом предст-нии описывается выр-ем
 ,
где аk,1=1
при N<0
и аk.1=0
при N≥0.
,
где аk,1=1
при N<0
и аk.1=0
при N≥0.
Диап-н представления чисел в дополнительном коде соответствует от — 2-mдвоичное до 1— 2-mдвоичное. Нуль имеет одно представление 000 ...0. Этот код наиболее удобен для работы с ЭВМ.
Обратный код образуется вычит-ем в 2-ой форме преобразуемого числа N из постоянной величины 2mдв+1 -1, т. е. находится дополнением до единицы к N.Образование отдельных разрядов в кодовом представлении происходит на основе выражения
 ,
где аk,1=1
при N<0
и аk.1=0
при N≥0.
,
где аk,1=1
при N<0
и аk.1=0
при N≥0.
В обратном коде нуль имеет двойное представление: 0+ = 0 000 ... 0 и 0- =1 111 ... 1. Диап-н чисел, представляемых в обратном коде, такой же, как и для прямого кода со знаком. Для полож-ых чисел представления в дополнительном и обратном кодах совпадают с представлением в прямом.
При исп-нии кодов, рассматриваемых выше, одновременно могут изменяться 2 значения разных разрядов. В принципе это может привести к ошибкам при считывании или неоднозначности представления числа, например, в тетрадно-десятичных кодах.
В цифровой ИТ довольно распространенной является промежуточная тетрадно-десятичная система счисления, в которой каждый десятичныйый разряд образуется из четырех двоичных- 8—4—2—1 — первый (младший) 10-ый разряд; 80—40—20—10 — второй 10-ый разряд; 800—400—200—100— третий 10-ый разряд и т. д.Т.е., здесь вес каждого более старшего разряда увеличивается в 10 раз.
Так как для удобства отсчета желательно, чтобы сумма цифр в каждой тетраде не превышала 9, в ЦИП обычно используют несколько видоизмененные коды тетрад: 4-2-2-1; 5-2-1-1 и т. д.Наиболее помехоустойчивым является код 2-4-2-1. Если в каком-то коде возможно неоднозначное представленик числа, то эту неоднозначность устраняют определенным порядком набора кода(характерно для кодов с суммой чисел не больше 9) При этом наиболее удобными с точки зрения выпол-ых в последующем математ. операций с числами явл-ся так называемые самодополняющиеся коды, в которых набираемая цифра будет допол-ем до 9-й цифры, набранной обратными разрядными коэф-ми. Например, цифра 3 при коде 4-2-2-1 имеет двоичную запись 0-0-1-1. Если же изменить разрядные коэф-ты на обратные (двоичная запись 1-1-0-0), то получим цифру 6, дополняющую первоначальную цифру до 9. Это свойство позволяет, например, заменять операцию вычитания чисел операцией сложения путем простой инверсии 2-ых изображений 10-ого числа.
Для устранения неоднозначности и повышения помехоустойчивости использ-ся отраженные коды, таких как код Грея, предложенный им в 1953г в качестве основы для построения преобразователя угол-код. Основное св-во отраженных кодов – два соседних числа отличаются цифрой только в одном разряде, причем эта цифра может быть только на единицу больше или меньше цифры в одноименном разряде соседнего числа.Т.е., в отраженных кодах нет одновременного изменения цифр в нескольких разрядах, что может явится причиной возникновения ошибки неоднозначности считывания. отраженные коды не имеют постоянного веса разряда и поэтомы относятся к непозиционным.
|
Позиционная |
1 |
2 |
3 |
… |
8 |
9 |
10 |
11 |
… |
18 |
19 |
20 |
21 |
… |
29 |
30 |
|
Отраженная |
1 |
2 |
3 |
… |
8 |
9 |
19 |
18 |
… |
11 |
10 |
20 |
21 |
… |
29 |
39 |
При возможности появления неоднозначности, т.е. при переходе 09→10 и одновременном изменении цифр в 2-х разрядах одновременно делается дугой переход:09→19, затем можно снова менять цифры только в младшем разряде в сторону уменьшения, чтобы использовать все возможные комбинации цифр в 2-х разрядах.
Аналогично строится собственно код Грея - отраженный двоичный код:
|
Десятичное число |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Позиционный двоичный код |
0000 |
0001 |
0010 |
0011 |
0100 |
0101 |
0110 |
0111 |
1000 |
|
Отраженный двоичный код |
0000 |
0001 |
0011 |
0010 |
0110 |
0111 |
0101 |
0100 |
1100 |
Вес i-го разряда в
коде Грея определяется
 .При
этом у всех нечетных единиц считается
со стороны страрших разрядов-вес
считается положительным, а у всех
четных-отрицательным.
.При
этом у всех нечетных единиц считается
со стороны страрших разрядов-вес
считается положительным, а у всех
четных-отрицательным.
Единичный код – обычно используется в частотно-импульсных ЦИУ, где число представляется пакетом единиц, изолированных паузами:

Математические операции обычно выполняют в натуральном двоичном коде, поэтомы коды переводят один в другой по установившимся правилам.
Наиболее выгодной
системой счисления по количеству
элементов, используемых для представления
заданного максимального числа Nmax,
является двоичная система- в ней требуется
число разрядов: и равное кол-вуm
дв.необходимых элементов с двумя
состояниями. в десятичной системе это
число элементов(с десятью состояниями):
и равное кол-вуm
дв.необходимых элементов с двумя
состояниями. в десятичной системе это
число элементов(с десятью состояниями):
 ,
в тетрадно-десятичной(элементы с двумя
состояниями):
,
в тетрадно-десятичной(элементы с двумя
состояниями):
Тип выбранного кода во многом определяет структуру и свойства ЦИУ.