

48. Основные сведения о построении систем фапч. Основные параметры типовой системы фапч
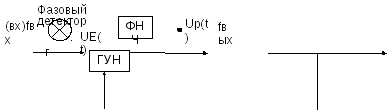
Схема ФАПЧ отслеживает изменение частоты входного сигнала за счёт соответствующего изменения частоты своего собственного генератора. Управляемый генератор формирует сигнал, частота которого зависит от напряжения постоянного тока, приложенного к одному из его входов.
Фазовый детектор (ФД) обеспечивает получение выходного напряжения, пропорциональное фазовому сдвигу между двумя сигналами, имеющими одну частоту.
ФД выполняется на основе перемножителей аналоговых сигналов, образующим произведение входного сигнала и выходного сигнала, поступающего с генератора управляемого напряжением (ГУН).
Пусть два сигнала,
которые должны быть умножены представлены
в виде
 ;
;
Произведением этих сигналов является выходной сигнал
 ,
где К, К1,
К2
– масштабные коэффициенты
,
где К, К1,
К2
– масштабные коэффициенты
В случае подключения
к выходу перемножителя фильтра низких
частот (ФНЧ), который не пропускает ВЧ
составляющую частоту 2w
, то выходное напряжение будет равно:

К3 – масштабный коэффициент
Пусть и
и идеально синхронизированы с частотой
свободных колебаний
идеально синхронизированы с частотой
свободных колебаний .
В этом случаеUp
будет равен нулю и угол φ должен составить
90 градусов. Т.о. сигнал ошибки пропорционален
разности фаз.
.
В этом случаеUp
будет равен нулю и угол φ должен составить
90 градусов. Т.о. сигнал ошибки пропорционален
разности фаз.
 и
и и центрирован вокруг опорного значения
фаз угла 90 градусов. Если
и центрирован вокруг опорного значения
фаз угла 90 градусов. Если отклоняется от
отклоняется от ,
тоUp
установится равным некоторому ненулевому
значению, которое скорректирует
,
тоUp
установится равным некоторому ненулевому
значению, которое скорректирует
 и сохранится захват частот, а величина
угла φ будет сдвинута на некоторую
величину Δφ относительно опорной фазы
и сохранится захват частот, а величина
угла φ будет сдвинута на некоторую
величину Δφ относительно опорной фазы
φ=φг.±Δφ, где φг=90
Up(t)= K*U1*U2*sin(φг.±Δφ,)=± K*U1*U2*cos(Δφ).
Если захват не может быть установлен, то
1) Амплитуда
выходного сигнала слишком мала, чтобы
вызвать необходимое изменение частоты
генератора
 .
.
2)
 находится
за пределами динамического диапазона
ГУН.
находится
за пределами динамического диапазона
ГУН.
49. Устройства адаптивной дискретизации. Основные особенности построения, работа, характеристики и области применения адаптивных циу.
50. Схемы с переходом от развертывающего к следящему уравновешиванию. Принципы построения и особенности работы.
Под адаптацией понимают приспосабливаемость ЦИУ к таким основным пар-рам измеряемого сигнала, как его значение, скорость изменения и внутреннее сопротивление его источника. Если измеряемый сигнал велик, то для уменьшения времени измерения его уравновешивание желательно вести как можно более крупными ступенями. Однако при этом ухудшается точность измерения, поэтому при уменьшении измеряемого сигнала ступени уравновешивания желательно также уменьшить. То же самое можно сказать и о скорости изменения измеряемого сигнала. След-но, можно считать, что точность и быстродействие ЦИУ обычно обратно пропорциональны друг другу. В случае быстрых изменений сигнала нужно ЦИУ с высоким быстродействием, а в случае медленных изменений сигнала, быстродействующее ЦИУ будет создавать бесполезную, или избыточную информацию, т. е. желат-но при этом автоматически уменьшить его быстрод-вие. Для решения этих задач необходимы адаптивные ЦИУ, которые в зависимости от пар-ров измеряемого процесса могут иметь оптимальные с точки зрения измерения хар-ки.
Одним из наиболее распространенных методов приспособления к значению измеряемого сигнала явл-ся переход от развертывающего уравновешивания крупными ступенями при большом сигнале к следящему уравновешиванию при малом сигнале. Довольно просто такой метод осущ-ся в ЦИУ ║-последовательного во времени уравновешивания при снятии самоблокировок пороговых элементов (ПЭ) младшего разряда и добавления к 9 основным ПЭ (при десятичной системе) еще двух - десятого и нулевого. При изменениях Uх в пределах младшего разряда, ПЭ младшего разряда будут «следить» за изменениями Uх а если эти изменения будут выходить за пределы младшего разряда, то десятый или нулевой ПЭ- включает повторную отработку Uх, начиная со старшего разряда.
При последовательном во времени уравновешивании такой способ также дост-но эффективен, т.к. больш-во узлов, подобных ЦИУ (сравнивающее устройство, генератор импульсов, отсчетное устройство, преоб-ль код—напряжение), могут быть использованы как при развертывающем, так и при следящем уравновешивании. Кроме того, триггерный регистр за счет соответствующего изменения нек-рых логических связей между триггерами может выполнять и ф-ции реверсивного счетчика для следящего уравновешивания.

Схема перестраива-ет стр-ру развертывающего уравновеш-я в стр-ру следящего уравновеш-я при значении разности IUх-UкI<4mz единиц младшего разряда, где m — кол-во разрядов, с помощью двух ПЭ с порогами срабатывания +4mz и -4mz и переключателя метода уравновешивания ПМУ. При подключении измеряемого напряжения схема работает вначале по методу развертывающего уравновеш-я, когда импульсы от ГИ поступают на программ-щее устройство ПУ, послед-но изменяющее сост-ние ПКН, и соотв-но Uк. Последний импульс ПУ включает ЦОУ и воздействует на ПМУ, который переводит схему в режим следящего уравновеш-я. При этом импульсы от ГИ поступают на счетный вход регистра Рг, выполняющего в этом случае ф-ции реверсивного счетчика. Направление счета импульсов опред-ся сигналами с СУ, поступающими на триггер знака Тгзн, управляющий шинами сложения («+») или вычитания («-») счетчика. Если в процессе слежения Ux изменится и разность Ux-Uк станет больше 4mz, то ПЭ опять переводят схему в режим развертывающего уравновеш-я. При этом ПМУ разрывает счетные связи между триггерами регистра Рг.
Следящее уравновеш-е с неравномерно-ступенчатой (поразрядной) отработкой явл-ся само по себе адаптивным к знач-ю измеряемого сигнала, т.к. при больших сигналах осущ-ет уравновеш-е крупными ступенями Uк (высокое быстрод-вие), а при малых сигналах автоматически переходит к уравновеши-ю малыми ступенями Uк (высокая точность). Одновр-но, следящее уравновеш-е во всех случаях позволяет сократить избыточную инф-цию, т.к. при медленных изменениях измеряемого сигнала отсчеты могут производиться соотв-но реже, чем при быстрых. Указанные св-ва можно еще улучшить, если ввести дополнительную адаптацию процесса отработки к размеру измеряемого сигнала.