

lab1
.docxМинистерство образования и науки РФ
Федеральное агентство по образованию
Новосибирский государственный технический университет
Кафедра Автоматики
Лабораторная работа №1
Стабилизация двухмассовой системы: модальный метод синтеза в пространстве состояний с наблюдателем полного порядка
Факультет: АВТ
Группа: ААМ-12
Студенты: Белых Д. Преподаватель:
Воевода А.А.
Новосибирск, 2013
Цель работы
Рассчитать
наблюдатель полного порядка и регулятор
(используя модальный метод синтеза в
пространстве состояний с использованием
пропорциональной матрицы в канале
обратной связи). Объектом управления
является двухмассовая система, в которой
два управляющих сигнала, силы
 и
и
 ,
приложены к массам
,
приложены к массам
 и
и
 ,
подвешенных последовательно на двух
пружинах жесткости k1
и k2,
а регулируемые величины – положение
грузиков
,
подвешенных последовательно на двух
пружинах жесткости k1
и k2,
а регулируемые величины – положение
грузиков
 и
и
 .
.
Таблица 1. Исходные данные
|
|
|
k1 |
k2 |
|
1 |
1 |
6 |
2 |



Выполнение работы
-
Описание модели
В предположении отсутствия демпфирования модель объекта «вход - выход» следующая:

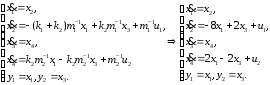
Перейдём к описанию в пространстве состояний. Запишем наблюдаемую каноническую форму:
 (1)
(1)
С
учётом исходных данных уравнение (1)
примет вид:
 ,
,
 ,
,
 .
.

Рис. 1. Модель исследуемой двух массовой системы (представлена в наблюдаемой канонической форме)

Рис. 2. Переходные процессы y(t) при U1=U2=1
Процессы на выходах y1 и y2 имеют вид незатухающих колебаний ( см. рис.2 ).
-
Расчёт наблюдателя полного порядка
Так как вектор состояния не доступен, то в систему вводится наблюдатель.
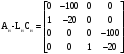
Запишем уравнения (1) в матричном виде:
 ,
,
 .
.
Здесь
 ,
,
 ,
,
 .
.
Матрица
 состоит
из четырех матриц
состоит
из четырех матриц
 размером 2×2: диагональные матрицы
описывают собственные свойства первого
и второго каналов: Собственные свойства
канала «первый вход – первый выход»
определяются коэффициентами второго
столбца матрицы
размером 2×2: диагональные матрицы
описывают собственные свойства первого
и второго каналов: Собственные свойства
канала «первый вход – первый выход»
определяются коэффициентами второго
столбца матрицы
 :
:
 ,
что соответствует коэффициентам
характеристического полинома
,
что соответствует коэффициентам
характеристического полинома
 .
Собственные свойства канала «второй
вход – второй выход» определяются
коэффициентами второго столбца матрицы
.
Собственные свойства канала «второй
вход – второй выход» определяются
коэффициентами второго столбца матрицы
 :
:
 ,
что соответствует коэффициентам
характеристического полинома
,
что соответствует коэффициентам
характеристического полинома
 .
Зададим собственные свойства каналов
полиномом
.
Зададим собственные свойства каналов
полиномом
 ,
то есть полюса заданы равными -10. Заданием
таких полюсов обеспечим время переходного
процесса наблюдателя по крайней мере
в десять раз меньше по сравнению с
переходными процессами в системе.
,
то есть полюса заданы равными -10. Заданием
таких полюсов обеспечим время переходного
процесса наблюдателя по крайней мере
в десять раз меньше по сравнению с
переходными процессами в системе.
Динамические
свойства наблюдателя описываются
уравнением
 ,
где
,
где
 -
ошибка оценки вектора состояния. Матрицу
-
ошибка оценки вектора состояния. Матрицу
 вычислим из условий, во-первых, устойчивости
наблюдателя, достаточно малого времени
устранения ошибки наблюдения и, наконец,
автономности каналов наблюдателя. Для
этого необходимо скомпенсировать
элементы
вычислим из условий, во-первых, устойчивости
наблюдателя, достаточно малого времени
устранения ошибки наблюдения и, наконец,
автономности каналов наблюдателя. Для
этого необходимо скомпенсировать
элементы

 матрицы
матрицы
 .
Таким образом матрицу
.
Таким образом матрицу
 находим из условия
находим из условия
 .
.
Элементы
матрицы
 обозначим через
обозначим через
 и вычислим
и вычислим
 :
:
 ,
,

Матрица Lн имеет вид:

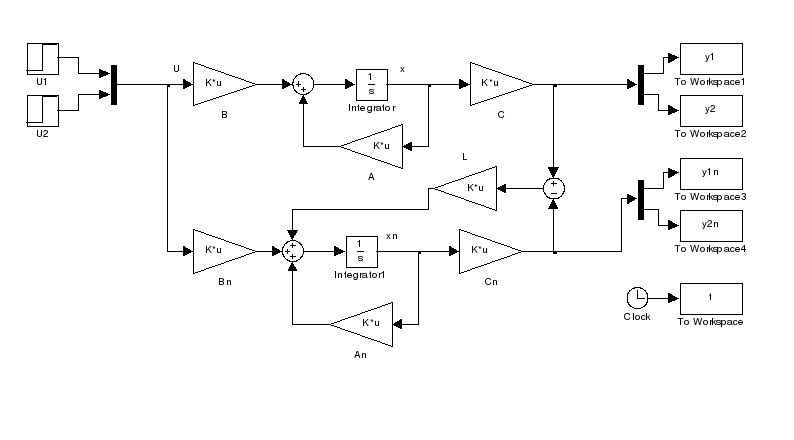
Рис. 3. Модель исследуемой двух массовой системы с наблюдателем(модели представлены в наблюдаемой канонической форме)

Рис. 4. Переходные процессы y1(t) и y1н(t) при U1=U2=1

Рис. 5. Переходные процессы y2(t) и y2н(t) при U1=U2=1
-
Расчёт регулятора
Запишем управляемую каноническую форму:
 (2)
(2)
В матричном виде уравнения (2) запишутся так:
 ,
,

Найдем
матрицы
 ,
соответствующие управляемой канонической
форме:
,
соответствующие управляемой канонической
форме:
 ,
,
 ,
,

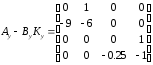
При введении матрицы K в обратную связь получим:
 ,
,
 .
.
Необходимо
скомпенсировать элементы
 матрицы
матрицы
 для устранения перекрестных связей.
Собственные свойства канала «первый
вход – первый выход» определяются
коэффициентами второй строки матрицы
для устранения перекрестных связей.
Собственные свойства канала «первый
вход – первый выход» определяются
коэффициентами второй строки матрицы
 :
{-8 0}, что соответствует коэффициентам
характеристического полинома
:
{-8 0}, что соответствует коэффициентам
характеристического полинома
 .
Собственные свойства канала «второй
вход – второй выход» определяются
коэффициентами второй строки матрицы
.
Собственные свойства канала «второй
вход – второй выход» определяются
коэффициентами второй строки матрицы
 :
{-2 0}, что соответствует коэффициентам
характеристического полинома
:
{-2 0}, что соответствует коэффициентам
характеристического полинома
 .
Зададим собственные свойства для канала
y1
полиномом
.
Зададим собственные свойства для канала
y1
полиномом
 ,
что соответствует полюсам -3, -3. Для
канала y2
полиномом
,
что соответствует полюсам -3, -3. Для
канала y2
полиномом
 ,
что соответствует полюсам -0.5, -0.5.
,
что соответствует полюсам -0.5, -0.5.
Таким
образом, матрицу
 находим из условия:
находим из условия:
 .
.
Матрица
 неизвестная
– элементы ее обозначим
неизвестная
– элементы ее обозначим
 :
:
 .
.
Вычислим
 :
:

Матрица
 имеет вид:
имеет вид:

Матрицы
A,
B,
и
C
объекта
и наблюдателя записаны в наблюдаемой
форме, а матрица
 – в управляемой. Следовательно, необходимо
перевести матрицу обратной связи также
в наблюдаемую форму. Для этого воспользуемся
матрицей перехода Т:
– в управляемой. Следовательно, необходимо
перевести матрицу обратной связи также
в наблюдаемую форму. Для этого воспользуемся
матрицей перехода Т:

Модель системы с наблюдателем полного порядка и регулятором представлена на рис.6. Результаты моделирования для первого и второго канала при U1=3 и U2=2 представлены на рис 7,8 соответственно.

Рис. 6. Модель системы с наблюдателем полного порядка и регулятором

Рис. 7. Переходные процессы y1(t),u(t),e1(t) в системе с наблюдателем и регулятором

Рис. 8. Переходные процессы y2(t),u(t),e2(t) в системе с наблюдателем и регулятором
tп1–
время переходного процесса в первом
канале
 1.45 с;
1.45 с;
 –
статическая
ошибка первого канала = 87%;
–
статическая
ошибка первого канала = 87%;
tп2– время переходного процесса во втором канале ≈ 9.5 с;
 –
статическая
ошибка второго канала = 300%;
–
статическая
ошибка второго канала = 300%;
Вывод
В ходе лабораторной работы для двухканального объекта управления был рассчитан наблюдатель полного порядка (процессы в наблюдателе повторяют процессы в объекте). Используя модальный метод в пространстве состояний с использованием пропорциональной матрицы в канале обратной связи был синтезирован регулятор. Рассчитанный регулятор не обеспечил статику и заданную динамику, но стабилизировать систему удалось.