

Экономический эффект применения частотно-регулируемого электропривода
1. Регистрируем потребляемую двигателем привода мощность Р0, кВт, при полностью закрытой задвижке на линии нагнетания, его cosφ, давление на линии нагнетания Н0, мм. в. ст.
2. Регистрируем потребляемую двигателем привода мощность Рм,кВт, при полностью открытой задвижке на линии нагнетания, его cos, давление на линии нагнетанияНм, мм. в. ст., максимальную производительность насосаQм, м3/час, при средней величине противодавления.
3. По полученным данным строим зависимости P = P0 + (Pм - P0) Q/Qм – расход электроэнергии в зависимости от производительности в существующей системе (кривая 1 на рис. 15.10);

Рис. 15.10. Потребляемая турбомеханизмом мощность: 1 – регулирование задвижкой;2– регулирование скоростью
Р=Рм Ч(Q/Qм)3– расход электроэнергии в зависимости от производительности при применении ЧРЭП (кривая2на рис. 15.10). Разница между кривыми1и2равна экономии мощностиРпри частотном регулировании скорости.
4. Определяются суточные графики нагрузки электродвигателя рассматриваемого турбомеханизма по суткам, неделям, месяцам, периодам года.
5. В каждом рассматриваемом периоде определяется продолжительность работы с загрузкойРi, для которой исходя из графиков на рис. 15.6 определяется экономия мощностиDРi.
6. Определяется суммарная экономия электроэнергии за годовой цикл работы оборудования по формуле

где DРi – экономия мощности заi-й период, кВт;ti –время, в течение которого привод работает с нагрузкойРi.
7. С учетом фактора экономии воды (воздуха) при снижении напоров магистрали (K= 1,15…1,2) стоимость сэкономленной энергии Стэл = (1,15…1,2)ТэЭ, где Тэ– тариф на электроэнергию в энергосистеме, руб/кВтч.
8. Мощность ЧРЭП с учетом запаса 10 % равна РЧРЭП = 1,1Рм кВт. Удельная стоимость ЧРЭП в настоящий момент колеблется от 100 до 400 долл. США (у отечественных производителей ниже).
9. Окупаемость ЧРЭП: Ток = (dу Kd РЧРЭП) / Стэл, гдеdу– удельная стоимость 1 кВт ЧРЭП, долл./кВт;Kd– курс доллара, руб.
Отечественные товаропроизводители выпускают ряд ЧРЭП, по своим характеристикам практически не отличающихся от зарубежных, но по стоимости более дешевых.
Компания «Триол» (Санкт-Петерберг), используя комплектующие ряда фирм, выпускает ЧРЭП серии АТ01–АТ05 от 5 до 315 кВт на 0,4 кв и от 160 до 1600 кВт на 6 (10) кв.
ОАО «Электровыпрямитель» (Саранск) на отечественных IQBT-транзисторах выпускает преобразователи частоты 16–63 А, 0,4 кВ; 400 А, 0,4 кВ.
«Allen Bradley», дочерняя компания корпорации «Rockwell Automatik», основана в 1903 году, действует в 57 странах, выпускает продукцию 350 000 наименований, в том числе:
частотно-регулируемые ЭП на диапазон мощностей до 14 тыс. кВт и напряжение до 7200 В при наработке на отказ до 16 лет;
программируемые контроллеры серии SLC (Small Logic Controllers) – 24 наименования, в т.ч. модули дискретного и аналогового ввода/вывода, модули быстрого счета и позиционирования и др.;
программируемые контроллеры серии PLC-5 (более развитая, но дороже), в которую входят только 14 моделей процессоров и огромное количество различных модулей;
программируемые контроллеры серии CL (Control Logix), как многопроцессорная многозадачная система при SLC/PLC комплекте конструкций, позволяющая строить многоуровневые сетевые АСУ ТП с «прозрачностью» для системного и прикладного программного обеспечения. Последнее позволяет в процессе работы с управляющего компьютера не только менять уставки и параметры процессов, но и изменять алгоритмы управления практически в любом контроллере сети;
набор датчиков: температуры, давления положения, фотоэлектрические сенсоры, устройства считывания штрихового кода, машинное зрение, датчики приближения, граничные переключатели и т.д.;
набор панелей отображения, рабочих мест операторов.
Среди сдерживающих факторов внедрения регулируемых электроприводов:
отсутствие экономической и моральной заинтересованности ИТР в энергоресурсосбережении;
деление на технологов, электриков и киповцев не способствует эффективной поддержке частотно-регулируемых электроприводов (эффект на стыке этих служб);
отсутствуют целевые программы и группы для ее реализации из представителей ряда групп.
9. ДИСТАНЦИОННЫЕ ЗАЩИТЫ
В сетях сложной конфигурации с большим числом источников питания обеспечить селективное отключение повреждений с помощью простых направленных защит не удается. Дифференциальные защиты на ЛЭП также имеют ограниченное применение, что связано с их особенностями. Один из способов защиты сложных систем - использование дистанционных защит (ДЗ). Дистанционной называется защита, время действия которой зависит от расстояния (дистанции) между местом установки защиты и точкой к.з. Выдержка времени нарастает в зависимости от увеличения расстояния до точки к.з.
При таком принципе ближайшая к месту к.з. защита всегда будет иметь меньшую выдержку времени. ДЗ всегда выполняются направленными.
На рисунке 60 представлена условная схема замещения линии электропередачи. Слева изображен источник питания, представляемый ЭДС системы Eси эквивалентным сопротивлением энергосистемыZc. Справа от ЛЭП изображено сопротивлениеZнaгp, выполняющее роль потребителя мощности. В нормальном режиме в месте установки реле сопротивления протекает ток Iн.р ,aTVизмеряет напряжениеUн.р„ на шинах. Отношение напряжения к току характеризует общее (эквивалентное) сопротивление всего участка изображенной сети в нормальном режиме

По
величине
 >>Zc+ZЛЭП, и общее
комплексное сопротивление имеет
активно-индуктивный характер, причем
активная составляющая сопротивления
больше, чем реактивная. Это связано
с тем, что обычно Рнагр>Qнагр.
При возникновении к.з. сопротивлениеZнaгpшунтируется, происходит снижение
напряженияUкзи
резкое увеличение токаIкз.
Эквивалентное сопротивление участка
значительно снижается за счет отсеканияZнaгpи частиZлэп, при
этом
>>Zc+ZЛЭП, и общее
комплексное сопротивление имеет
активно-индуктивный характер, причем
активная составляющая сопротивления
больше, чем реактивная. Это связано
с тем, что обычно Рнагр>Qнагр.
При возникновении к.з. сопротивлениеZнaгpшунтируется, происходит снижение
напряженияUкзи
резкое увеличение токаIкз.
Эквивалентное сопротивление участка
значительно снижается за счет отсеканияZнaгpи частиZлэп, при
этом

Рис. 60. Условная схема замещения ЛЭП
таким
образом,
 значительно уменьшается по модулю в
сравнении с
значительно уменьшается по модулю в
сравнении с ,
и так как для элементов энергосистемы
обычно выполняется условиеR<X, тоZK3поворачивается относительноZн.р,
как это изображено на рис. 61.
,
и так как для элементов энергосистемы
обычно выполняется условиеR<X, тоZK3поворачивается относительноZн.р,
как это изображено на рис. 61.

Рис. 61. Соотношение ZнриZK3
Если
к.з. является трехфазным и металлическим,
то остаточное напряжение на шинах
подстанции Uкзбудет
зависеть от расстояния до точки к.з. в
соответствии с графиком, приведенным
на рис. 62, так как на каждом километре
ЛЭП происходит падение напряжения на
величину ,
гдеZ0 - удельное
сопротивление ЛЭП, Ом/1 км.
,
гдеZ0 - удельное
сопротивление ЛЭП, Ом/1 км.
Рис .напряжение вдоль ЛЭП при кз
Таким образом, принцип действия ДЗ основан на резком снижении сопротивления при к.з. В связи с тем, что при к.з. напряжение снижается, а ток увеличивается, ДЗ получаются более чувствительными, чем токовые, т.к. реагируют на изменение сразу двух параметров - тока и напряжения. Причем сопротивление при к.з. уменьшается в несколько раз больше по сравнению с уменьшением напряжения или увеличением тока.
Основной
элемент ДЗ - дистанционный орган,
определяющий удаленность к.з. от места
установки защиты. В качестве его
используют реле сопротивления, реагирующее
чаще всего на полное сопротивление
 .
Выполнение реле активного или реактивного
сопротивления сложнее и не имеет
особых достоинств при применении в ДЗ.
.
Выполнение реле активного или реактивного
сопротивления сложнее и не имеет
особых достоинств при применении в ДЗ.
Для обеспечения селективности:
- ДЗ выполняются направленными, для этого применяется реле направления мощности или направленное реле сопротивления:
- выдержки времени у защит, работающих при одном направлении мощности, согласуются между собой. Выдержка времени защиты при к.з. за пределами защищаемой линии на Δtбольше, чем на соседней.
Для реле сопротивления, используемого в дистанционных защитах, наиболее наглядно изображает на плоскости рабочую и нерабочую зоны характеристика срабатывания.

Характеристика срабатывания реле сопротивления
Характеристикой
срабатывания реле сопротивления
называется зависимость
 Реле
сопротивления подключено к трансформаторам
тока и напряжения. Если измеряемое
сопротивление
Реле
сопротивления подключено к трансформаторам
тока и напряжения. Если измеряемое
сопротивление попадает внутрь
попадает внутрь
Рис.
64. Характеристики
 для направленных реле сопротивления
для направленных реле сопротивления
характеристики
срабатывания реле, изображаемой в
координатах (R,jX)
- рис. 63, то оно замыкает свои контакты,
если не попадает, то контакты реле
остаются разомкнутыми. Если место
установки защиты совместить с началом
координат, то для ненаправленного реле
полного сопротивления будет
иметь вид окружности (рис. 63), радиус
которойZ=ZCp
выставлен на реле сопротивления.
Таким образом, характеристика
будет
иметь вид окружности (рис. 63), радиус
которойZ=ZCp
выставлен на реле сопротивления.
Таким образом, характеристика представляет
собой геометрическое место точек,
удовлетворяющих условию
представляет
собой геометрическое место точек,
удовлетворяющих условию .
При
.
При реле
работает, при
реле
работает, при - не работает. Следовательно, реле
сопротивления является реле минимального
действия, которое срабатывает при
уменьшении воздействующей величины.
Характеристики срабатывания
направленного реле имеют вид, показанный
на рис. 64.
- не работает. Следовательно, реле
сопротивления является реле минимального
действия, которое срабатывает при
уменьшении воздействующей величины.
Характеристики срабатывания
направленного реле имеют вид, показанный
на рис. 64.
Для всех реле сопротивления необходимо выполнение следующих требований:
1. Быстродействие, чтобы мгновенная ступень отключала к.з. как можно быстрее.
2.
Точность работы
 реле
не должно отличаться от
реле
не должно отличаться от более, чем на 10%. Это
более, чем на 10%. Это
требование обеспечивает стабильность зон ДЗ.
3.
Высокое значение

Зависимость
выдержки времени защиты t=f( )может возрастать плавно или ступенчато
(рис. 65).
)может возрастать плавно или ступенчато
(рис. 65).
Технически наиболее просто выполнена ступенчатая зависимость. Дистанционные зашиты, используемые в энергосистемах, имеют 3 или 4 ступени.

Реле сопротивления, основной элемент ДЗ, выполняются электромеханическими, статическими или на интегральных микросхемах. Принцип действия всех разновидностей реле основан на сравнении нескольких напряжений, которые являются функциями напряжения и тока.
Рис.
65. Зависимость t=f( )
)
Так, например, можно сравнить по величине, по модулю или сдвигу фаз два напряжения:
 ;
; .
.
Изменение коэффициентов kпозволяет получать различные характеристики срабатывания реле (круговые, эллиптические и т.п.).
Рассмотрим подробнее некоторые из способов выполнения реле сопротивления.
Например, реле сопротивления с направленной характеристикой, сделанное на балансе напряжений (рис. 66). На данном принципе основаны реле КРС-1, КРС-2, используемые в панели защиты линий серии ЭПЗ.
Напряжения UIиUIIдля рассматриваемого реле имеют вид
 ;
;
 ,
,
причем k1 - коэффициент трансформации автотрансформатораTV1;k2=k3=k- коэффициенты трансформацииTAV1,TAV2.

Автотрансформатор TV1 подключается к вторичным обмоткам трансформатора напряженияTV. Напряжениеk1Upподается на вход выпрямительного мостаVS1.
Рис. 66. Направленное реле сопротивления со схемой сравнения на балансе напряжений
TAV1,TAV2- трансреакторы, на первичные обмотки которых подается токIр. Величина Е =-jkIpснимается со вторичной обмотки трансреактора и подается на схему сравнения.
Вторичные
обмотки TV1 иTAV1
включены встречно и .
НапряженияUIиUIIподаются на выпрямительные мостыVS1
иVS2 соответственно. Далее
выпрямленные напряжения
.
НапряженияUIиUIIподаются на выпрямительные мостыVS1
иVS2 соответственно. Далее
выпрямленные напряжения и
и сравниваются на исполнительном органе
реле (ИО). В качестве ИО может быть
использовано поляризованное реле или
высокочувствительное магнитоэлектрическое
реле. Условие срабатывания ИО
сравниваются на исполнительном органе
реле (ИО). В качестве ИО может быть
использовано поляризованное реле или
высокочувствительное магнитоэлектрическое
реле. Условие срабатывания ИО ,
что соответствует изменению тока и
напряжения при к.з. Начало действия реле
соответствует условию
,
что соответствует изменению тока и
напряжения при к.з. Начало действия реле
соответствует условию
 или
или
 .
.
Разделив
обе части последнего равенства на k1Ip,
получим .
.
Если
учесть, что
 ,
то получим
,
то получим и обозначим радиус
и обозначим радиус .
Тогда векторk/k1определяет положение центра окружности
относительно начала координат с заданной
величинойZyст.
Следовательно, данное реле - направленное
реле сопротивления. Уставка срабатывания
регулируется изменением коэффициентовkиk1.
Максимальное значениеZcp.maxполучается при значении угла
.
Тогда векторk/k1определяет положение центра окружности
относительно начала координат с заданной
величинойZyст.
Следовательно, данное реле - направленное
реле сопротивления. Уставка срабатывания
регулируется изменением коэффициентовkиk1.
Максимальное значениеZcp.maxполучается при значении угла .
.
При
трехфазных и двухфазных к.з. в месте
установки защиты Up= 0 и реле сопротивления может не
сработать. СопротивлениеZK3попадает в данном случае на пограничную
кривую .
Для того чтобы реле сопротивления
работало при данных к.з., в реле введен
контур подпитки - трансформаторTV2.
Он имеет одну первичную обмотку и две
вторичных (рис. 66), с которых ЭДС
подпитки Еп подается на оба
выпрямительных мостаVS1
иVS2. Отсюда
.
Для того чтобы реле сопротивления
работало при данных к.з., в реле введен
контур подпитки - трансформаторTV2.
Он имеет одну первичную обмотку и две
вторичных (рис. 66), с которых ЭДС
подпитки Еп подается на оба
выпрямительных мостаVS1
иVS2. Отсюда
 ;
;

В случае двухфазного к.з. АВ в месте установки защиты Up= 0. Если включить ЕпнаUC, то в реле подается Еп≠ 0, и реле сработает.
При трехфазных к.з. все напряжения равны нулю и Епсуществует за счет разрядного тока конденсатора С, что также позволяет реле сопротивления сработать.
Условие работы реле сопротивления можно записать следующим образом:
 .
.

Реле
сопротивления работают с погрешностью,
т.е.
 - действительное значениеZcp
отличается от установленногоZyст.
Основными причинами этого являются
- действительное значениеZcp
отличается от установленногоZyст.
Основными причинами этого являются
Рис.
67. Зависимость
 .
.
механические
моменты реле ИО и другие факторы,
ограничивающие чувствительность
конструкций реле, а также нелинейность
магнитопроводов и выпрямителей реле.
Характер зависимости
 приведен
на рис. 67.
приведен
на рис. 67.
Отличие
ZcpотZyстособенно
значительно при малых и больших значенияхIр. ЕслиUp= 0, то реле сработает только в случае .
При увеличенииIрвеличина ΔZуменьшается.
При больших значенияхIрвеличина ΔZснова возрастает.
Из графика видно, что существует область
токовIр, при которых
отличиеZcpотZyстпрактически отсутствует, т.е. работает
с минимальной погрешностью
.
При увеличенииIрвеличина ΔZуменьшается.
При больших значенияхIрвеличина ΔZснова возрастает.
Из графика видно, что существует область
токовIр, при которых
отличиеZcpотZyстпрактически отсутствует, т.е. работает
с минимальной погрешностью .
.
Принято, что в эксплуатации отличие ZyстотZcpне должно превышать 10%.
Токи,
при которых величина
 ,
называются токами точной работы. На
графике (см. рис. 67) указаны токи
,
называются токами точной работы. На
графике (см. рис. 67) указаны токи и
и .
Если
.
Если ,
то реле замеряет сопротивление с
погрешностью меньше 10%. Желательно,
чтобы диапазон изменения токов при к.з.
в сети соответствовал зоне
,
то реле замеряет сопротивление с
погрешностью меньше 10%. Желательно,
чтобы диапазон изменения токов при к.з.
в сети соответствовал зоне .
.
Рассмотрим в качестве примера расчет уставок трехступенчатой дистанционной защиты. График согласования защит приведен на рис. 68.
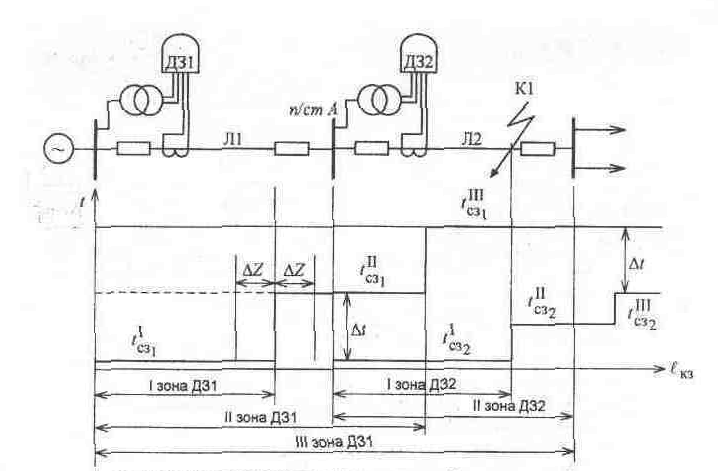
Рис. 68. График согласования по времени ступеней дистанционной защиты
I
зона ДЗ1 охватывает часть Л1. Уставка
по сопротивлениюIзоны
рассчитывается с учетом погрешностей
в работе реле сопротивления (ΔZ)
и .
Для того чтобыIзона не
выходила за пределы Л1 -ZC3<ZЛЭП.
.
Для того чтобыIзона не
выходила за пределы Л1 -ZC3<ZЛЭП.
Iступень ДЗ - мгновенная, и зависит от времени замыкания контактов
реле сопротивления и промежуточных
реле:
зависит от времени замыкания контактов
реле сопротивления и промежуточных
реле: .
.
II зонаД31 охватывает всю Л1 и часть линии подстанции А.IIзона Д31 захватывает также часть Л1 и является для нее резервной. По сопротивлению и по времениIIзона ДЗ 1 согласуется сIзоной Д32:
 ,
,
где
kн=0,85,kтр- коэффициент токораспредсления, который
учитывает различие тока, протекающего
по реле защиты и тока в месте к.з. при
сложной конфигурации сети; ,
где Iкз- суммарный ток к.з. при
к.з. в точке К1,Iр-
ток, протекающий по реле защиты 1 при
расчетном к.з. в точке К1.
,
где Iкз- суммарный ток к.з. при
к.з. в точке К1,Iр-
ток, протекающий по реле защиты 1 при
расчетном к.з. в точке К1.
Для
надежного действия реле сопротивление
IIзоны должно быть на
35-40% больше, чемZЛ1.
Условием обеспечивается селективное отключение
повреждений в начале Л2.
обеспечивается селективное отключение
повреждений в начале Л2.
III
зона.ПротяженностьIIIзоны зависит от чувствительности реле
сопротивления, на которых установка выбирается по условию отстройки от
нагрузочных режимов:
выбирается по условию отстройки от
нагрузочных режимов:
 ,
где kн=1,2;kв=1,15;
,
где kн=1,2;kв=1,15;


Время
действия
 .
.
IIIзона должна по возможности охватывать линии Л1 и Л2.
Схема трехступенчатой дистанционной защиты приведена на рис. 69.
Обозначения, принятые на схеме: БН - блокировка от нарушения цепей напряжения; ПО - пусковой орган; ОМ - орган направления мощности; ДО1, ДОИ - дистанционные органы IиIIступеней (зон); БК - блокировка от качаний; КТН, КТШ - орган выдержки времениIIиIIIзон;KL- выходное реле защиты;KHI,KHII, КНШ - сигнальные релеI,IIи Ш зон.
Найденные Zсзустанавливаются следующим образом:
 ДОI;
ДОI; ДОII;
ДОII; ПО.
ПО.
При
к.з. в Iзоне работают ПО,
ДOIи ДОII,
т.к. ,
сигнал на отключение подается через
БК без выдержки времени.
,
сигнал на отключение подается через
БК без выдержки времени.
При
к.з. во IIзоне и ДОIне работает, отключение
происходит со временем действияIIзоны.
и ДОIне работает, отключение
происходит со временем действияIIзоны.
При
к.з. в IIIзоне и
и ,
поэтому работает только ПО и отключение
линии происходит со временем
,
поэтому работает только ПО и отключение
линии происходит со временем (как и у МТЗ).
(как и у МТЗ).
Наличие БН необходимо, т.к. при обрыве цепей напряжения Up= 0, и это может быть воспринято защитой как трехфазное или двухфазное к.з. в месте установки защиты, поэтому устройство БН выводит защиту из действия при обрыве цепей напряжения. При снижении и„ в результате к.з. БН не должно препятствовать работе защиты. Это достигается специальной схемой подключения БН к трансформаторам напряжения.
БК выводит Iзону защиты из действия при возникновении качаний. Подробно данный вопрос будет рассмотрен ниже.
Большое значение для правильной работы защиты имеет точная и правильная работа дистанционных органов защиты. Их назначение - измерять расстояние от места установки защиты до точки к.з. Как правило, на дистанционных органах выставляется уставка по сопротивлению IиIIзон.
При выборе схемы включения дистанционных органов необходимо:
-
чтобы Zpна зажимах реле было пропорционально
расстоянию кз
до места к.з.;
кз
до места к.з.;
- Zpне зависел от вида к.з. и режима работы сети, что обеспечивает стабильность зон при различных видах к.з.
Для выполнения этих требований включение реле выполняется на ток и напряжение петли к.з., а именно дистанционный орган включается на линейное напряжение (UAB) и разность соответствующих фазных токов (IA-IB).
При трехфазном к.з. все напряжения одинаковы и равны падению напряжения в соответствующих фазах от места установки защиты до точки к.з.:
 .
.
Ток реле
 ,
т.к. Iр- разность фазных токов.
,
т.к. Iр- разность фазных токов.
Замер
 .
.
При двухфазном к.з. (АВ) IА= -IB, следовательно, Iр=2Iкз.
Напряжение равно падению напряжения в петле к.з., т.е.
 ,
,
отсюда

Следовательно, замер Zpне зависит от вида к.з. при данной схеме включения.
Уставка IIIзоны ДЗ по сопротивлению выставляется на пусковых органах. Схема включения пусковых органов может быть такой же, как и дистанционных, а если одной из задач пусковых органов является определение вида к.з., то пусковые органы включают на линейное напряжение и фазный ток, например,UABиIA.
Подобная
схема включения используется в схемах,
где дистанционный орган переключается
на разные токи и напряжения в
зависимости от вида возникшего к.з.
Поскольку
 выбирается по условию отстройки отZраб.min, то
на сильно загруженных линиях эта величина
может быть соизмерима сZкз. Для увеличения чувствительности
пусковых органов используют
направленное реле сопротивления (рис.
70).
выбирается по условию отстройки отZраб.min, то
на сильно загруженных линиях эта величина
может быть соизмерима сZкз. Для увеличения чувствительности
пусковых органов используют
направленное реле сопротивления (рис.
70).
При металлических к.з. угол кзблизок к углумч(угол максимальной чувствительности - это угол, при котором значениеZcpдостигает максимального значения), а в нагрузочных режимахнагр<кз, поэтому, еслиZнагрблизок кZкзза счет увеличениякз,Zкзпопадает в зону работы реле.
Следует отметить, что существуют причины, искажающие замеры дистанционных органов, связанных с влиянием переходного сопротивления дуги, которое определяется по эмпирической формуле, Ом:
 ,
,
где
 дуги=м,Iдуги=A
дуги=м,Iдуги=A

Рис. 70. Характеристика срабатывания направленного репе сопротивления
Дистанционные защиты являются основными защитами ЛЭП 35; 110 кВ. На ЛЭП 220 кВ и 500 кВ они используются как резервные.
|
3. |
Программируемые контроллеры |
|
|
- Отличие программируемых контроллеров от других микропроцессорных средств автоматизации. |
|
|
- Языки программирования логических и регулирующих контроллеров. |
|
|
- Характеристики языков IL, ST,LD, FBD, SFS. Язык СЧПУ МС2101 ЯРУС. |
|
|
- Примеры программируемых контроллеров ведущих фирм – изготовителей. |
Программируемый логический контроллер, ПЛК — микропроцессорное устройство, предназначенное для выполнения алгоритмов управления. Принцип работы ПЛК заключается в сборе и обработке данных по прикладной программе пользователя с выдачей управляющих сигналов на исполнительные устройства. Программируемые логические контроллеры применяются для решения задач автоматизации от управления несложными комплексами (автоматическими линиями разлива, фасовочными автоматами, управление насосами, управление дверьми и воротами, системы обогрева и вентиляции, системы безопасности и сигнализации) до главных компьютеров, которые могут быть использованы для решения задач автоматизации любой степени сложности. программируемый контроллер - электронная составляющая промышленного контроллера, специализированного (компьютеризированного) устройства, используемого дляавтоматизации технологических процессов. В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управлениястанков.
ПЛК являются устройствами реального времени.
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
в отличие от микроконтроллера(однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — областью применения ПЛК обычно являются автоматизированные процессыпромышленного производствав контексте производственногопредприятия;
в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналовдатчикови вывод сигналов наисполнительные механизмы;
в отличие от встраиваемых системПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шинышириной 8 или 16 разрядов), получить мощные системы, действующие в режимереального времени. В современных ПЛК числовые операции в языках их программирования реализуются наравне с логическими. Все языки программирования ПЛК имеют лёгкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
Структуры систем управления
Централизованная: в корзину ПЛК устанавливаются модули ввода-вывода. Датчики и исполнительные устройства подключаются отдельными проводами непосредственно, либо при помощи модулей согласования к входам/выходам сигнальных модулей;
Распределенная: удалённые от ПЛК датчики и исполнительные устройства связаны с ПЛК посредством каналов связи и, возможно, корзин-расширителей с использованием связей типа «ведущий-ведомый» (англ. Master-Slave).
Конфигурируемые: В ПЛК хранится несколько программ, а через клавиатуру ПЛК выбирается нужная версия программы. свободно программируемые: программа загружается в ПЛК через его специальный интерфейс с Персонального компьютераиспользуя специальное ПО производителя, иногда с помощьюпрограмматора
Для программирования ПЛК используются стандартизированные языки МЭК (IEC) стандарта IEC61131-3
Языки программирования (графические)
LD(Ladder Diagram) — Язык релейных схем — самый распространённый язык для PLC
FBD(Function Block Diagram) — Язык функциональных блоков — 2-й по распространённости язык для PLC
SFC(Sequential Function Chart) — Язык диаграмм состояний — используется для программирования автоматов
CFC(Continuous Function Chart) — Не сертифицирован IEC61131-3, дальнейшее развитие FBD
Языки программирования (текстовые)
IL(Instruction List) — Ассемблеро-подобный язык
ST(Structured Text) — Паскале-подобный язык
Структурно в IEC61131-3 среда исполнения представляет собой набор ресурсов (в большинстве случаев это и есть ПЛК, хотя некоторые мощные компьютеры под управлением многозадачных ОС представляют возможность запустить несколько программ типа softPLC и имитировать на одном ЦП несколько ресурсов). Ресурс предоставляет возможность исполнять задачи. Задачи представляют собой набор программ. Задачи могут вызываться циклически, по событию, с максимальной частотой.
Программа — это один из типов программных модулей POU. Модули (Pou) могут быть типа программа, функциональный блок и функция. В некоторых случаях для программирования ПЛК используются нестандартные языки, например: Блок-схемы алгоритмов Си-ориентированная среда разработки программ для ПЛК. HiGraph 7 — язык управления на основе графа состояний системы.
Инструменты программирования ПЛК на языках МЭК 61131-3 могут быть специализированными для отдельного семейства ПЛК (например, STEP 7 для контроллеров SIMATIC S7-300/400) или универсальными, работающими с несколькими (но далеко не всеми) типами контроллеров:
CoDeSys
ISaGRAF
ИСР "КРУГОЛ"
Beremiz
KLogic
Интерфейсы плк
RS-232
RS-485
ModBus
ProfiBus
DeviceNet
ControlNet
CAN
AS-Interface
Промышленный Ethernet
Основные ПЛк]
Siemens—SIMATICS5 и S7;
Schneider Electric— серия Modicon (M168, M238, M258, M340, Premium, Quantum);
Beckhoff;
Segnetics— Pixel2511 и SMH 2Gi;
Mitsubishi— серияMelsec (FX, L, Q);
Honeywell—MasterLogic;
OmronCJ1, CJ2, CS1
Программируемое (интеллектуальные) реле
Siemens LOGO!,
Mitsubishi— серияAlpha XL,
Schneider Electric—Zelio Logic,
Omron — ZEN,
Moeller — EASY, MFD-Titan,
Comat BoxX.
ОВЕН ПР110 и ПР114
Delta Electronics DVP-SS2, DVP-SE, DVP-SA2, DVP-SV и DVP-PM
Программные ПЛК на базе IBM PC-совместимых компьютеров
MicroPC,
WinCon,
WinAC,
CoDeSys SP/SP RTE,
S2 Netbox,
ICP DAS.