

Razdatochnyy_material_2010
.pdf11. Динамические модели макроэкономики. Линейные модели динамики валового внутреннего продукта (ВВП) и чистого внутреннего продукта (ЧВП): простая модель, модель Харрода-Домара.
Справедливо основное макроэкономическое тождество Y = I + C, где C конечное потребление;инвестиции в накопление ОПФ, Y – чистый внутр. продукт (ЧВП), причем Y X (1 am ) , где Х – ВВП, a
норма отчислений на амортизацию. I B |
dY |
- линейный акселератор, где В капиталоемкость ЧВП. |
|
|||
dt |
|
|||||
|
|
|
|
|
||
Подставим в основное макроэк. тождество выражение для инвестиций, получим (*) |
|
|||||
Y (t) B |
dY (t) |
C(t) однопродуктовая динамическая модель ЧВП Леонтьева. |
|
|||
dt |
|
|||||
|
|
|
|
|
||
Случай 1. C(t) 0 предельный случай, то есть, потребления нет. Уравнение примет вид Y(t)= B |
dY(t) |
|||||
dt |
||||||
|
|
|
|
|
||
I
m
,
отсюда
dY |
|
1 |
Y |
|
dt |
B |
|||
|
|
1 t
. Решение уравнения имеет вид Y (t) Y (0)eВ , то есть Y (t) растет с индексом
IndY
1 В
.
Случай 2:
C(t) C(0) const
. Уравнение модели имеет вид
Y (t)
B |
dY (t) |
|
dt |
||
|
C(0)
, где
B
const
. Запишем:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
t – общее решение однородного |
||||||||
Y * (t) = C(0) – частное решение неоднородного уравнения, Y |
(t) C e |
В |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
уравнения. Далее запишем Y (t) Y (t) Y *(t) C1e |
t |
C(0) – общее решение неоднородного уравнения. При |
||||||||||||||||||||||
|
||||||||||||||||||||||||
t 0 получим Y (0) C1 C(0) откуда C1 Y (0) C(0) , Y (t) Y (0) C(0) e |
t |
C(0) . |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
Y |
(t) |
|
|
|
|
|
e t |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
IndY (t) |
|
|
|
|
Y (0) C(0) |
|
темп прироста дохода, он стремится к |
|
|
при t + . |
|
|||||||||||||
Y (t) |
Y (0) C(0) e |
t |
C(0) |
B |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Модель чистого внутреннего продукта Харрода-Домара |
|
|
|
|
|
|
|
|||||||||||||||||
Совместное действие мультипликатора |
1 |
и акселератора B порождает непрерывный и прогрессирующий |
||||||||||||||||||||||
c |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
рост выпуска продукции или дохода. Y = I + C + A основное балансовое соотношение, где I Ia Ii |
сумма |
|||||||||||||||||||||||
интенсивностей автономных инвестиций вместе с индуцированными инвестициями, причем I |
|
B |
dY |
, |
||||||||||||||||||||
i |
dt |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
C Ca Ci |
сумма интенсивностей автономного потребления вместе с индуцированным потреблением, Ci kY |
|||||||||||||||||||||||
норма потребления постоянна (для части потребления, зависящего от ЧВП), A |
сумма интенсивностей чистого |
|||||||||||||||||||||||
экспорта Ex |
и государственных закупок Gv . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В итоге получаем уравнение Y B |
dY |
kY Ia |
Ca Ex Gv модель Харрода-Домара. Обозначим |
|||||||||||
dt |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A Ia Ca Ex Gv . Введем s 1 k |
норма производственного накопления. Отсюда sY B |
dY |
||||||||||||
dt |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
dY |
s |
|
|
|
s |
t |
|
dY |
dY |
s |
A |
|
||
|
|
|
|
|
|
|||||||||
A 0 , имеем dt |
B Y , откуда Y (t) Y (0)e |
B |
. В общем случае sY B dt A , |
dt |
B y B . |
|
||||||||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Анализ модели проводится аналогично в трех основных случаях: А = 0, А = А(0), А = А(0) ert.
A
. При
12. Линейная односекторная модель динамики ВВП.
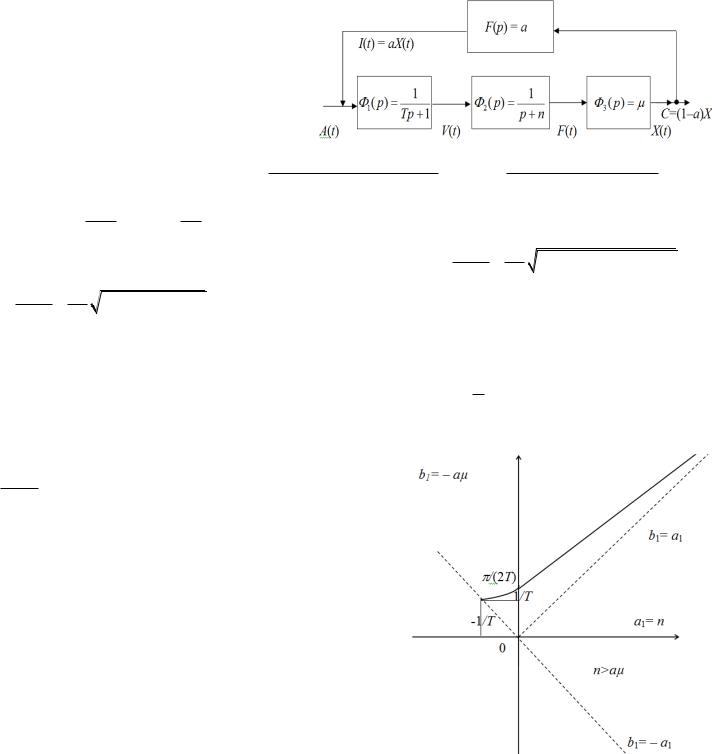
Рассмотрим линейную односекторную модель выпуска валового внутреннего продукта (ВВП) с учетом выбытия (амортизацией) с инерционным запаздыванием фондообразованием.
X(t) – ВВП, A(t) – внешние инвестиции, I(t) – собственные инвестиции,
V(t) –инвестиции в производство,
F(t) – основные произв. фонды (ОПФ), C(t) –непроизводственное потребление,
– средняя капиталоотдача,
а– ср. норматив отчислений на кап. вложения, n – ср. норма амортизации ОПФ, Т – лаг фондообразования.
Справедливо: X ( p) W ( p) A( p) |
, W ( p) |
( p) |
2 |
( p) |
3 |
( p) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
1 |
|
|
|
|
|
, W ( p) |
|
|
|
|
|
|
, модель |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
c |
|
1 |
( p) |
|
( p) |
(t)F ( p) |
|
c |
|
Tp |
(Tn 1) p n a |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 |
X |
|
|
|
|
dX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
имеет вид: |
T |
|
(Tn 1) |
(n a ) X A(t) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
dt |
2 |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Характ. ур-ие имеет вид: |
T |
2 |
(Tn 1) n a 0 |
Ее корни: 1,2 |
|
Tn 1 |
|
1 |
|
(Tn 1) |
2 |
4T (n a ) |
|||||||||||||||||||||||
|
2T |
2T |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Tn 1 |
|
1 |
|
(Tn 1) |
2 |
4a T |
. Корни вещественные. Соответственно выводим: условие n a |
означает, что |
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||
2T |
2T |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1,2 0 |
, то есть в ситуации отсутствия автономных инвестиции ( A(t) 0 ) ВВП X (t) сокращается, условие |
||||||||||||||||||||||||||||||||||
n a |
означает, что 2 |
0 , |
а 1 |
0 |
, то есть в ситуации отсутствия автономных инвестиции ВВП |
X (t) |
растет. |
||||||||||||||||||||||||||||
И, наконец, в ситуации маловероятной
n a
находим
1 0
и
2
(n
1 T
)
. В этом случае в ситуации
отсутствия автономных инвестиции выпуск стабилизируется.
Модель выпуска ВВП с учетом выбытия (амортизации) и с дискретным запаздыванием образования капитала имеет вид:
dX (t) |
nX (t) a X (t T ) A(t T ), t 0, |
||||
|
|
||||
|
dt |
|
|
|
|
X ( ) X |
0 |
( ), если 0. |
|
||
|
|
|
|
|
|
По графику видно, что условие n a |
означает, что |
||||
асимптотическая устойчивость, то есть в ситуации отсутствия
автономных инвестиции ( A(t) 0 ) ВВП |
X (t) сокращается, |
условие n a означает, что имеет место неустойчивость, то есть в ситуации отсутствия автономных инвестиции ВВП X (t) растет. И, наконец, в ситуации n a находим, что в этом
случае в ситуации отсутствия автономных инвестиции выпуск стабилизируется, то есть уравнение просто устойчиво.
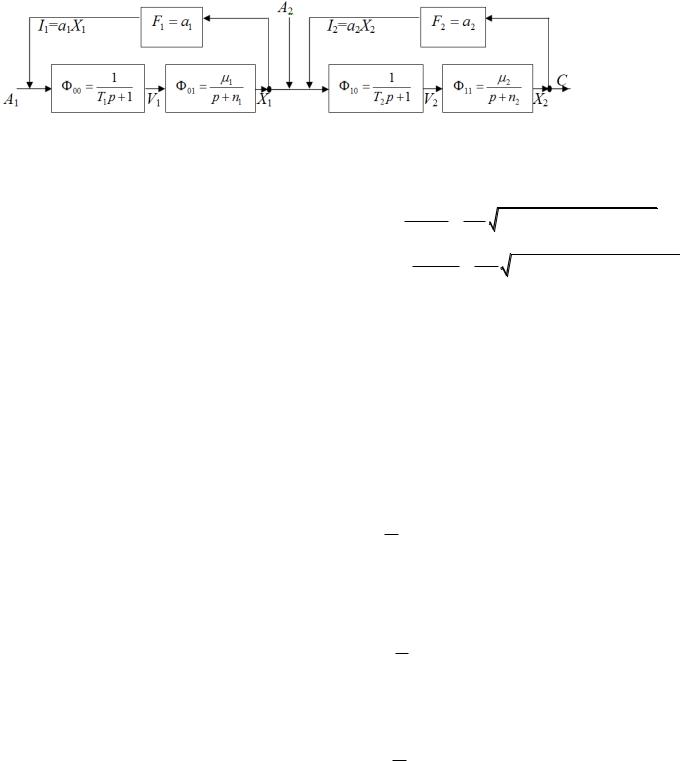
13.Линейная двухсекторная модель динамики ВВП.
X i – валовые выпуски секторов, i 1, 2, Ai – автономные инвестиции секторов, Ii – внутренние инвестиции секторов, Vi – реальные инвестиции в производство в секторах, i – средние технологические темпы (фондоотдачи) секторов, ai – средний норматив отчислений на капитальные вложения, ni – средняя норма амортизаций ОПФ, Ti – средний лаг фондообразования, причем X1 W1 A1 , X2 W2 ((1 а1 )X1 A2 ) ,
С (1 a2 )X2 .
Модель имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
T |
d 2 X1 |
(T n 1) |
dX1 |
(n a ) X |
|
A , |
T |
d 2 X 2 |
(T n 1) |
dX 2 |
(n a |
) X |
|
|
((1 а ) X |
|
A ) , |
|||||||
|
|
1 |
|
|
2 |
1 |
||||||||||||||||||
1 |
dt |
1 |
1 |
dt |
1 |
1 |
1 |
1 |
1 |
2 |
2 |
2 |
dt |
2 |
2 |
2 |
|
2 |
1 |
2 |
||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|||
C (1 a2 )X2 .
Первое характ. ур-ие:
T |
2 |
(T n 1) n a |
||||
|
|
|
|
|
|
|
1 |
|
1 |
1 |
1 |
1 |
1 |
0
,
|
|
T n 1 |
|
1 |
(T n |
1) |
2 |
4T (n a ) |
|||||
1 |
1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
1,2 |
|
|
2T |
|
2T |
1 |
1 |
|
|
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
.
|
|
|
T2 |
2 |
(T2n2 1) n2 a2 2 0 , |
3,4 |
|
|
T n |
1 |
|
1 |
|
|
1) |
2 |
4T2 |
(n2 a2 2 ) . |
|||||||
Второе характ. ур-ие: |
|
2 |
2 |
|
|
(T2n2 |
|||||||||||||||||||
|
|
2T |
2T |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
Условие n1 |
a1 1 , n2 |
a2 2 означает, |
что корни первого характ. уравнения 1,2 |
0 |
и корни второго характ. |
||||||||||||||||||||
уравнения |
3,4 0 , то есть, в ситуации отсутствия автономных инвестиции ( A1 |
(t) 0 |
, A2 (t) 0 ) выпуски X1 (t) |
||||||||||||||||||||||
и |
X 2 (t) сокращается. Условие n1 |
a1 1 , n2 a2 2 означает, |
что 2 |
0 , а |
1 0 |
, в то время как 3,4 0 . То есть, |
|||||||||||||||||||
в ситуации отсутствия автономных инвестиции выпуск |
X1 (t) |
растет, а выпуск |
X |
2 (t) |
стремится к тренду, |
||||||||||||||||||||
определяемому выпуском |
|
X1 (t) . Условие n1 a1 1 , n2 |
a2 2 |
означает, что 2,4 |
0 . То есть, в ситуации |
||||||||||||||||||||
отсутствия автономных инвестиции выпуск X1 (t) растет, а выпуск |
X 2 (t) тоже растет. Условие |
n1 a1 1 , |
|||||||||||||||||||||||
n2 |
a2 2 означает, что корни первого характ.уравнения 1,2 0 |
и корни второго характ. уравнения |
4 0 , |
||||||||||||||||||||||
3 |
0 . То есть, в ситуации отсутствия автономных инвестиции ( A1 (t) 0 , |
A2 (t) 0 ) выпуск X1 (t) |
сокращается, |
||||||||||||||||||||||
в то время как выпуск |
X 2 |
(t) растет. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Наконец, в ситуации n1 a1 1 находим |
1 0 и 2 (n1 |
1 |
) . В этом случае, в ситуации отсутствия |
||||||||||||||||||||||
T |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
автономных инвестиции, выпуск |
X1 (t) |
стабилизируется. Условие n2 |
a2 2 означает, что корни второго |
||||||||||||||||||||||
характеристическое уравнение 4 |
0 |
, 3 0 , значит, выпуск |
X |
2 (t) |
растет. Условие |
n2 a2 2 |
означает, что |
||||||||||||||||||
корни второго характ. уравнения |
3,4 |
0 , поэтому, хотя выпуск |
X1 (t) стабилизируется, выпуск |
X 2 |
(t) падает. И |
||||||||||||||||||||
последнее, в ситуации
n a |
||
1 |
1 |
1 |
находим
1 0
и
2
(n1
|
1 |
) |
|
T |
|||
|
|
||
|
1 |
|
, а в ситуации
n2 a2 2
находим
3 0
и
|
(n |
|
1 |
) . В этом случае в ситуации отсутствия автономных инвестиции выпуск X |
|
(t) и выпуск X |
|
(t) |
|||||||||||||
|
1 |
2 |
|||||||||||||||||||
4 |
2 |
|
T2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
постоянные. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Наконец, в ситуации |
n |
a |
|
находим 0 и (n |
|
1 |
) . Условие n a |
означает, что корни первого |
|||||||||||||
2 |
|
||||||||||||||||||||
|
|
|
|
|
2 |
2 |
|
3 |
4 |
2 |
|
T |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
характ. уравнения 2 |
0 , 1 |
0 , значит, выпуск X1 (t) |
растет, |
выпуск X 2 (t) тоже растет. Условие n1 a1 1 |
|||||||||||||||||
означает, что корни первого характ. уравнения 1,2 |
0 , поэтому, хотя выпуск X1 (t) |
падает, выпуск X 2 (t) |
|
||||||||||||||||||
стабилизируется. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
14. Линейная и нелинейная модель Филлипса динамики ВВП, ЧВП, капитала и инвестиций.
I BY |
|
|
- линейный акселератор (дифференцирующее звено),. Рассматривают также случай нелинейного |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
, где – одна из указанных ниже функций. Акселератор позволяет по Y |
|
определить |
|
||||||||||||||||||||||||
акселератора I (Y ) |
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность планируемых инвестиций (решений об инвестировании) J (Y ) . |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
В этой схеме объединены линейный и нелинейный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
случаи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
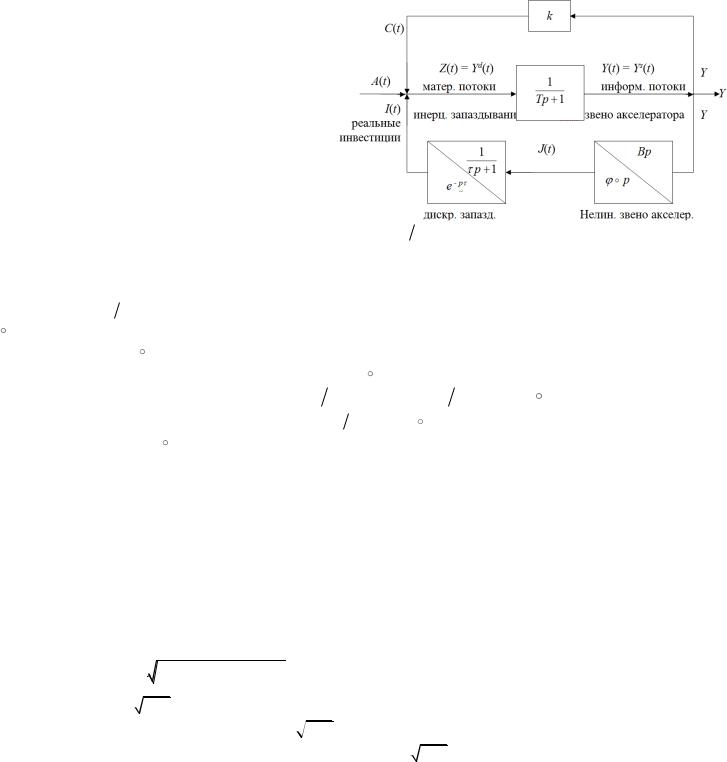
Здесь Z (t) Y |
d |
(t) — спрос на ЧВП, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Y (t) Y |
|
s |
(t) |
– |
предложение ЧВП. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
I |
– интенсивность инвестиций, индуцированных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
ЧВП, B |
|
|
– коэффициент акселератора (приростная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
капиталоемкость ЧВП), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Y – интенсивность производства ЧВП, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
J |
- запланированные инвестиции, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
k |
- предельная склонность к потреблению. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
А – автономные инвестиции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Между спросом и предложением имеется |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
инерционное запаздывание, то есть зависимость вида |
Y ( p) Z( p) (Tp 1) при Y (0) 0 . Это означает, что |
|
||||||||||||||||||||||||||||||||||||||
между Z и Y существует зависимость в виде ЛОДУ |
TY |
|
Y Z . Здесь |
T |
лаг запаздывания формирования |
|
||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||
предложения ЧВП. Далее распишем TY |
|
Y Z A I |
C , где C kY |
– потребление, индуцированное ЧВП. |
||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
Реальные инвестиции |
I |
связаны с запланированными инвестициями J |
инерционным запаздыванием. I |
|
I |
J |
||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
то есть I ( p) J ( p) ( p 1) при I (0) 0 . Здесь |
– лаг запаздывания ввода реальных инвестиций. Выражение |
|||||||||||||||||||||||||||||||||||||||
|
p означает последовательное выполнение двух операций: дифференцирования и вычисления значения |
|
||||||||||||||||||||||||||||||||||||||
функции. Например, ( |
p)(Y ( p)) в изображениях означает в оригиналах следующее: |
|
|
. Отсюда можно |
||||||||||||||||||||||||||||||||||||
(Y (t)) |
||||||||||||||||||||||||||||||||||||||||
написать, что в случае нелинейного акселератора J ( p) ( p)(Y ( p)) |
|
|
|
|
|
|
|
|
— |
|||||||||||||||||||||||||||||||
— для изображений, J (t) (Y (t)) |
||||||||||||||||||||||||||||||||||||||||
для оригиналов. Далее при |
I (0) 0 имеем |
I ( p) 1 |
( p 1) J ( p) 1 |
( p 1)( |
|
p)(Y ( p)) . Выведем |
||||||||||||||||||||||||||||||||||
модель Филипса. Перепишем тождество |
I ( p) C( p) 1 ( p 1) ( p)(Y ( p)) kY ( p) |
в виде |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
( p 1)(I ( p) C( p)) |
( |
p)(Y ( p)) ( p 1)kY ( p) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Перейдем к оригиналам (при Y (0) 0 , |
|
I (0) 0 , C(0) 0 ): |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
(I (t) C (t)) I (t) C(t) |
(Y (t)) k( Y (t) Y (t)) |
. Далее продифференцируем тождество |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
TY Y Z A I C , |
получим TY Y Z A I C . |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Выразим: I |
|
C |
|
TY |
|
Y |
|
|
|
(TY |
|
Y |
|
|
|
|
|
|
|
|
Y A |
|
|
|
kY , |
|
|
|
|
|
||||||||||
|
|
|
|
A , откуда |
|
|
A ) TY |
|
(Y (t)) k Y |
|
|
|
|
|
|
|||||||||||||||||||||||||
TY (T k )Y |
(Y ) (1 k)Y A A . Обозначим |
s 1 k |
, |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
получим нелинейную модель Филипса TY |
|
(T s )Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
(Y ) sY A A . Линейный случай возникает, |
||||||||||||||||||||||||||||||||||||||
когда (Y ) BY . Линейная модель Филлипса имеет вид: TY (T s B)Y sY A A. |
|
|
|
|
||||||||||||||||||||||||||||||||||||
Линейная модель Филлипса асимптотически устойчива тогда и только тогда, когда T s B 0 . |
|
|
|
|||||||||||||||||||||||||||||||||||||
В случае линейной модели Филлипса все зависит от корней характеристического уравнения |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
1 |
B T s |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
1,2 |
|
|
|
(s T B)2 4 sT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
2 sT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
,
Если 0 T s B 2
 sT , процесс циклический с затухающей амплитудой, то есть линейная модель Филлипса асимптотически устойчива. Если T s B 2
sT , процесс циклический с затухающей амплитудой, то есть линейная модель Филлипса асимптотически устойчива. Если T s B 2
 sT , процесс монотонный убывающий, то есть линейная
sT , процесс монотонный убывающий, то есть линейная
модель Филлипса асимптотически устойчива. Если T s B 2
 sT , процесс монотонный убывающий, то есть линейная модель Филлипса асимптотически устойчива.
sT , процесс монотонный убывающий, то есть линейная модель Филлипса асимптотически устойчива.
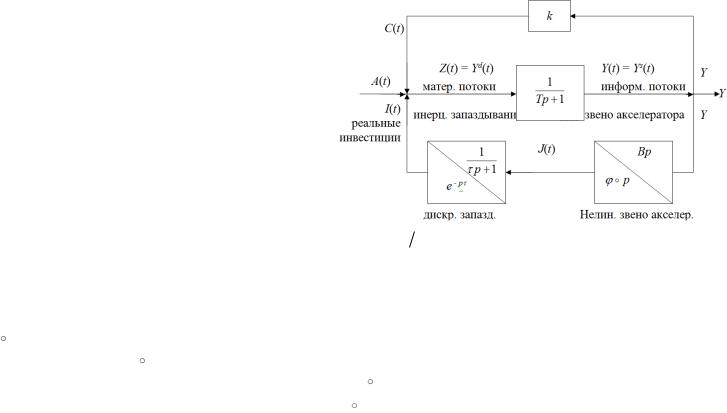
15. Линейная и нелинейная модель Гудвина динамики ВВП, ЧВП, капитала и инвестиций.
I BY |
|
- линейный акселератор (дифференцирующее звено),. Рассматривают также случай нелинейного |
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||||
акселератора |
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
определить |
|
||||||||
(Y ) , где – одна из указанных ниже функций. Акселератор позволяет по Y |
|
|
||||||||||||||||||||||
интенсивность планируемых инвестиций (решений об инвестировании) |
|
|
|
|
|
|||||||||||||||||||
J (Y ) . |
|
|
|
|||||||||||||||||||||
В этой схеме объединены линейный и нелинейный |
|
|
|
|
|
|
|
|
||||||||||||||||
случаи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Z (t) Y |
d |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Здесь |
|
— спрос на ЧВП, |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Y (t) Y |
s |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
– |
|
предложение ЧВП. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
I |
– интенсивность инвестиций, индуцированных |
|
|
|
|
|
|
|
|
|||||||||||||||
ЧВП, |
B |
– коэффициент акселератора (приростная |
|
|
|
|
|
|
|
|
||||||||||||||
капиталоемкость ЧВП), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Y |
– интенсивность производства ЧВП, |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
J |
- запланированные инвестиции, |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
k |
- предельная склонность к потреблению. |
|
|
|
|
|
|
|
|
|||||||||||||||
А – автономные инвестиции. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Между спросом и предложением имеется |
|
|
|
|
|
|
|
|
||||||||||||||||
инерционное запаздывание, то есть зависимость вида Y ( p) Z( p) (Tp 1) при Y (0) 0 . Это означает, что |
|
|||||||||||||||||||||||
между Z и Y существует зависимость в виде ЛОДУ TY |
|
Y Z . Здесь T |
лаг запаздывания формирования |
|
||||||||||||||||||||
|
|
|||||||||||||||||||||||
предложения ЧВП. Далее распишем TY |
|
Y Z A I C , где C kY |
– потребление, индуцированное ЧВП. |
|||||||||||||||||||||
|
||||||||||||||||||||||||
Реальные инвестиции I |
связаны с запланированными инвестициями J |
дискретным запаздыванием |
|
|||||||||||||||||||||
I (t) J (t ) |
, то есть |
I ( p) e |
p |
J ( p) .Здесь – лаг запаздывания ввода реальных инвестиций. Выражение |
||||||||||||||||||||
|
||||||||||||||||||||||||
|
p |
означает последовательное выполнение двух операций: дифференцирования и вычисления значения |
|
|||||||||||||||||||||
функции. Например, ( |
|
|
|
|
|
|
|
|
|
|
|
. Отсюда можно |
||||||||||||
p)(Y ( p)) в изображениях означает в оригиналах следующее: (Y (t)) |
||||||||||||||||||||||||
написать, что в случае нелинейного акселератора J ( p) ( |
p)(Y ( p)) |
|
|
|
|
— |
||||||||||||||||||
— для изображений, J (t) (Y (t)) |
||||||||||||||||||||||||
для оригиналов. Далее при |
I (0) 0 имеем I ( p) e p ( p)(Y ( p)) . |
|
|
|
|
|
||||||||||||||||||
Выведем модель Гудвина. |
TY Y Z A I C , где I (t) (Y (t )) , C(t) kY (t) . Отсюда получим |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TY (t) Y (t) A(t) (Y (t )) kY (t) . Итак, получаем следующие уравнения модели: |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— нелинейная модель Гудвина (в случае нелинейного акселератора), |
|
|||||||||
TY (t) sY (t) |
(Y (t )) A(t) |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
A(t) — линейная модель Гудвина (в случае линейного акселератора). |
|
|
||||||||||
TY (t) sY (t) |
BY (t ) |
|
|
|||||||||||||||||||||
Линейная модель Гудвина асимптотически устойчива, если
B T
, s 0 .
16. Ранняя линейная динамическая модель Калецкого. |
|
|
|
Берем основное макроэкономическое тождество Y C I A |
, С Cа Сi сумма интенсивностей автономного |
||
потребления вместе с индуцированным потреблением, Ci kY |
индуцированное потребление, I Ia Ii |
|
|
сумма интенсивностей автономных инвестиций вместе с индуцированными инвестициями, Ii sY |
|
||
индуцированные инвестиции, 0 s 1, k s 1 . Решение об объеме инвестиций в момент времени t |
|
||
определяется формулой |
J (t) asY (t) bK(t) (t) , где 0 a 1, b 0 , (t) случайное отклонение, |
|
|
|
дискретное запаздывание по времени получения ОПФ. Средняя величина ввода |
|
|
невязка. K (t) J (t ) |
|
||
инвестиций за промежуток времени
(t
,t)
:
|
1 |
t |
|
I (t) |
|
||
|
|||
|
t |
||
|
|
J (s) ds
.
|
|
|
|
|
|
|
|
|
|
1 |
t |
|
|
d |
|
|
|
1 |
|
|
1 |
|
|
|
Преобразуем выражение I (t) |
|
|
K (s ) ds = |
t |
|
(K (t ) |
||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
ds |
|
K (s ) |t |
= |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
равенство Y C I A , причем |
С Cа Сi |
, Ci kY |
, получим Y (t) |
1 |
(I (t) |
|||||||||||||||||||
s |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Y (t) |
1 |
(K (t ) K (t)) |
1 |
( A(t) |
Ca (t)) . Подставим это выражение и |
J (t) |
||||||||||||||||||
s |
s |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
J (t) asY (t) bK(t) (t) : |
|
|
|
|
|
|
|
|
1 |
(K (t ) K (t)) a( A(t) Ca (t)) |
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
K (t ) a |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
a |
K (t ) ( |
a |
b)K (t) a( A(t) Ca (t) (t)) . |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
Получили K (t ) |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если t |
преобразуется в t |
, то уравнение примет вид: |
|
|
|
|
||||||||||||||||||
K (t) |
a |
K (t) ( |
a |
b)K (t ) a( A(t ) C (t ) (t )) . |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
K (t)) . Далее используем |
||||
A(t) Ca (t)) |
= |
|||
d |
K (t ) |
в формулу |
||
dt |
||||
|
|
|
||
bK(t) (t) |
|
|
||
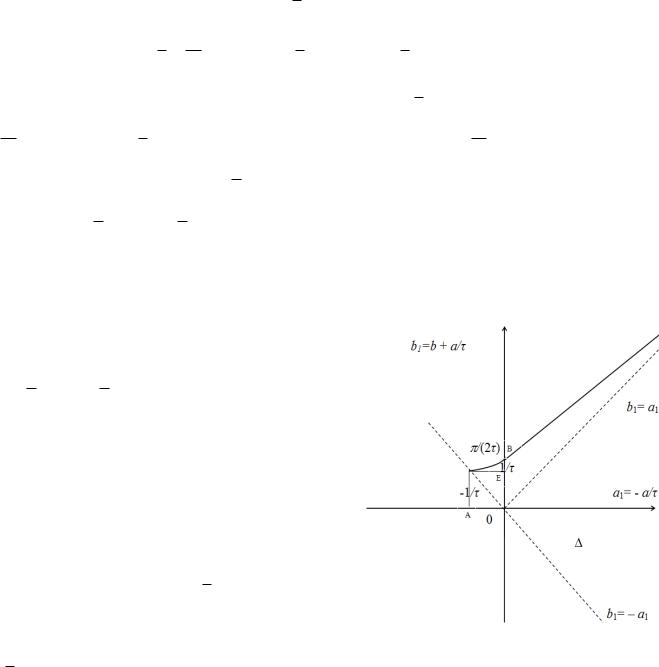
Получаем ЛДРУ первого порядка стационарного типа (все коэффициенты и запаздывания равны const).
|
|
|
|
|
|
|
a x(t) b x(t ) |
f (t) |
|
|
|
|
|||||||
|
|
|
|
|
x (t) |
|
|
|
|
||||||||||
Сравнивая уравнение: |
|
|
1 |
1 |
|
|
|
|
|
, |
|
|
|
||||||
x( ) ( ), |
0, |
t 0 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
находим |
|
a |
a1 , b |
a |
b1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
f (t) a(A(t ) Ca (t ) (t )) . |
|
|
|
|
|
|
|
|
|
||||||||||
Из условий задачи получаем: 0 a |
1, значит |
1 |
a1 0 |
, |
|
||||||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
b1 0 . Асимптотическая устойчивость будет иметь место, |
|
||||||||||||||||||
когда точка (a1,b1 ) (OAB) . Этот треугольник состоит из |
|
||||||||||||||||||
равностороннего треугольника OAE и криволинейного |
|
|
|
|
|||||||||||||||
треугольника EAB. Попадание точки |
(a1, b1 ) в равносторонний |
||||||||||||||||||
треугольник OAE означает: |
a1 |
b1 1 , или: |
a |
b |
a |
|
|
|
1 |
, |
|||||||||
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
из которого следует, что 0 b |
1 a |
, откуда 0 a 1 b , |
|
||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 b |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Устойчивость модели Калецкого и зависит от значения коэффициентов а и b в уравнении реакции системы.
Коэффициент а выражает реакцию («чувствительность») инвестиционных решений на накопление (валовые сбережения), которые в некоторых условиях (когда накопляют только капиталисты) совпадают с непотребленной частью валовой прибыли капиталистов. Как видим, необходимым (но не достаточным) условием устойчивости является а < 1, объем инвестиционных решений должен быть меньше валового накопления.
Коэффициент b выражает реакцию («чувствительность») инвестиционных решений на запасы наличного основного капитала.
17.Поздняя линейная динамическая модель Калецкого.
Вданной модели предполагается, что капиталовложения производятся не только в основной капитал, но и в запасы сырья, готовых продуктов и незавершенное производство.
Пусть |
Ik будет фактической величиной капиталовложений в основной капитал, Is капиталовложения в запасы, |
|
так что I Ik Is . Затраты на запасы принимаются зависящими от изменений в выпуске продукции с |
||
фиксированным временным отставанием |
|
|
Is (t) Js (t 1) B1Y (t 1) , |
||
где B1 |
инвестиционный коэффициент, |
1 отставание. Предполагается также, что фактические затраты на |
основной капитал производятся одновременно с установкой оборудования, то есть с оплатой поставок, но имеют
фиксированное запаздывание |
2 |
, причем 0 1 |
2 , по отношению к соответствующим решениям об |
|||||||
инвестициям: |
Ik (t) Jk (t |
|
|
|
|
Jk (t) характеризует утвержденные решения об инвестициях в |
||||
2 ) K (t) (*), где |
||||||||||
основной капитал в момент t , а |
K (t) |
величина основного капитала. |
|
|||||||
В качестве факторов, влияющих на решения об объеме инвестиций |
Jk (t) принимаются: норма сбережений, |
|||||||||
изменения в скорости выпуска продукции (оба фактора влияют на увеличение Jk в прямом направлении) и |
||||||||||
изменения в величине основного капитала (оказывает противоположное влияние на величину |
Jk ). Тогда |
|||||||||
|
|
|
|
|
|
|
|
|
|
(**) |
J (t) a S(t) B2Y (t) bK (t) (t) |
,то есть J (t) as Y (t) B2Y (t) bK (t) (t) . |
|||||||||
Из уравнений (*) и (**) получаем |
|
|
|
|
|
|
||||
Ik (t 2 ) Jk (t) as Y (t) B2Y (t) bK (t) (t) as Y (t) B2Y (t) bIk (t) (t) . |
|
|||||||||
Далее сложим: |
Ik (t |
|
|
|
|
|
|
|
будет среднее запаздывание (взвешенное по |
|
2 ) b Ik (t) as Y (t) B2Y (t) (t) . Пусть |
||||||||||
b ), такое, что |
Ik (t 2 ) b Ik |
(t) |
Ik |
(t ) ( 0 2 ), и примем |
|
неизменным. Тогда предыдущее уравнение |
||||
1 |
b |
|
||||||||
|
|
|
|
|
|
|
|
|
||
перепишется так: Ik (t ) |
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
|
|
asY (t) B2Y (t) (t) . |
|
|
|
|||||
|
|
1 b |
|
|
|
|
|
|
||
Далее предположим, что отставание в создании запасов равно среднему запаздыванию инвестиций в основной
капитал ( 1 |
). Тогда из уравнения для Is , находим |
Is (t ) B1Y (t) и |
||||||||
I (t ) Ik |
(t ) Is |
(t ) |
as |
|
B |
|
|
(t) |
|
|
|
Y (t) B1 |
2 |
|
|
|
. |
||||
1 b |
|
Y (t) |
1 |
b |
||||||
|
|
|
|
1 b |
|
|
||||
Наконец, пользуясь уравнением Y |
1 |
I Ca |
A , мы можем в этом уравнении оставить члены, содержащие |
|
s |
||||
|
|
|
либо только капиталовложения I (t) , либо только ЧВП Y (t) . Калецкий выбирает первый вариант и получает:
I (t ) |
as |
|
1 |
I (t) C |
|
(t) A(t) |
|
|
B |
B |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
I (t) C |
|
(t) A (t) |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
1 b |
|
|
|
|
a |
|
|
|
|
|
|
1 |
1 b |
|
|
|
|
|
a |
|
|
|
|
|
1 b |
|
|
|
|
|
||||||||||
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
a |
|
|
|
1 |
|
|
|
B2 |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
1 |
|
B2 |
|
|
|
|
|
|
|
(t) |
|
|||||||
|
|
I (t) |
|
|
B |
|
|
|
I (t) |
|
|
|
Ca (t) A(t) |
|
|
|
B1 |
|
|
|
Ca |
|
|
|
|
|
|
|
|
|
. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
1 b |
|
|
|
|
|
1 |
|
|
|
|
1 b |
|
|
|
|
|
|
|
(t) A (t) |
1 |
b |
|||||||||||||||||||||
|
|
|
|
s |
|
|
1 b |
|
|
|
|
|
|
|
|
|
|
|
s |
|
1 b |
|
|
|
|
|
|
|
|||||||||||||||
Введя удобную подстановку и упростив, получим ранее записанное: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- дифференциально-разностное уравнение опережающего типа. |
|||||||||||||||||||||||||||
I (t) a1I (t) b1 I (t ) f (t), t 0 |
|||||||||||||||||||||||||||||||||||||||||||
Здесь: |
a1 |
|
|
|
|
as |
|
, |
b1 |
|
|
(1 b)s |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
B1 (1 |
b) B2 |
B1 |
(1 b) B2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
s |
|
|
1 |
|
(t) (t |
f (t) |
|
|
A(t) Ca |
(t) (B1(1 b) B2 ) |
|
|||
|
b) B2 |
|
A (t) Ca |
|||||
|
B1 |
(1 |
|
|
s |
|
|
|
По смыслу 0 a1 b1 |
и при достаточно малом |
уравнение неустойчиво. |
|
|||
Выведем теперь уравнение для ЧВП: Y |
1 |
I C |
|
A , I sY Ca A, |
I |
|
|
a |
|||||
|
|
s |
|
|
||
|
|
|
|
|
||
Y (t) a1Y (t) b1Y (t ) f1(t), t 0 , где
)
.
sY C |
|
a |
|
A
, и наконец,
f1 |
(t) |
1 |
|
|
|
Ca (t) A(t) b1 |
Ca (t ) A(t ) |
|
. |
|
|
|
|
||||||
s |
|
f (t) Ca (t) A (t) a1 |
|
||||||
|
|
|
|
|
|
|
|||

18. Односекторная динамическая нелинейная модель ВВП Рамсея-Солоу-Свена. Исследование модели Рамсея-Солоу-Свена.
Обозначим X ВВП. Справедливо равенство |
X I C , I – инвестиции, C – конечное потребление, k u |
C |
|||||
X |
|||||||
|
|
|
|
|
|
||
доля непроизводственного потребления, s 1 k 1 u |
I |
– доля произв. накопления. |
|
||||
X |
|
||||||
|
|
|
|
|
|
||
Основное уравнение динамики ОПФ имеет вид K |
|
I K |
, норма амортизации. Здесь предполагают, что |
||||
|
|||||||
–
L(t) = L e t , L(t) людские ресурсы, |
x(t) |
X (t) |
– производительность труда, k(t) |
K (t) |
- |
||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
L(t) |
|
|
|
|
|
|
|
|
|
L(t) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
фондовооруженность (капиталовооруженность), откуда |
|
K kL . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Продифференцируем последнее выражение: |
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
K получим |
|||||||||||||||||
|
(kL) |
k L kL . Далее, из равенства K |
|
||||||||||||||||||||||||||||||
k L kL I kL это уравнение динамики. При этом потребление I sX , X F(K, L,t) |
–производственная |
||||||||||||||||||||||||||||||||
функция со степенью однородности один, явно зависящая от времени t. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Разделим обе части уравнения динамики на L: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
k |
k |
L |
s |
X |
K |
, k sf (k,t) ( )k ,где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
L |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
X |
|
F (K, L,t) |
|
1 |
F (K, L,t) F( |
K |
, |
L |
|
,t) F( |
K |
,1,t) F(k,1, t) f (k, t). |
|
|
|
|
|
|
||||||||||||||
L |
|
L |
|
|
|
L |
L |
L |
|
L |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
При 0 и u 1 s u(t) получаем модель Ф.Рамсея (F.Ramsey), 1928 г. При |
0 и u 1 s const |
||||||||||||||||||||||||||||||||
получаем модель Р.Солоу (R.Solow) и Р.Свена (R.Swon), 1956 г. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k sf (k,t) ( )k, |
||||||||
Окончательно модель в удельных (относительных) показателях имеет вид |
k(0) |
k |
. |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Исследование модели Рамсея-Солоу-Свена (РСС) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Модель РСС в относительных показателях имеет вид |
k |
|
sf (k,t) ( )k . |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
Если заменить |
k |
|
на |
k , то получим приближенное равенство |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
k s f (k,t) ( p)k прирост фондовооруженности. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Исследуем модель методами теории обыкновенных дифференциальных уравнений (ОДУ). |
|
|
|
||||||||||||||||||||||||||||||
1) Проверка существования решения. Рассматриваемая модель |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
k |
|
sf (k,t) ( )k нестационарное неавтономное нелинейное ОДУ первого порядка, для него необходимо |
|||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
проверить существование решения. |
|
|
|
|
|
|
|
|||
Решение существует, если: f (t, k) непрерывна по t и k. В наших моделях предполагается непрерывность |
f (t, k) |
|||||||||
при t 0 и k 0 . |
|
|
|
|
|
|
|
|
||
2) Решение единственно, если выполнено достаточное условие единственности решения: |
|
|
|
|||||||
а) существует |
|
f |
и непрерывна в рассматриваемой области; |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
б) если выполнено условие Липшица: существует L 0 для любого |
k |
, k |
2 |
из области |f (t, k ) f (t, k |
2 |
) | |
|
|||
|
|
|
|
1 |
|
1 |
|
|
||
L | k1 k2 | для любого t 0. |
|
|
|
|
|
|
|
|||
3) Существование стационарной траектории (решения), то есть такой траектории, что |
k(t) const . При этом |
траектория k(t) k* либо асимптотически устойчива (по Ляпунову), либо просто устойчивая (по Ляпунову), либо неустойчивая (по Ляпунову). Пусть k(t) k* . Подставим это выражение в уравнение, получим (k* ) 0 sf (k* ) – ( )k* , отсюда приходим к алгебраическому уравнению sf (k* ) ( )k* 0 .
Вданном случае при k0 > 0 все траектории асимптотически устойчивы. Это называется асимптотической устойчивостью (по Ляпунову) в целом (в данной области, то есть при k > 0).
Внаших примерах решение при k0 > 0 существует и единственно, то есть любой начальной точке соответствует
одна единственная траектория.

19.Задача оптимизации удельного потребления в модели Рамсея-Солоу-Свена. «Золотое правило накопления» Фелпса.
Модель РСС в относительных показателях имеет вид |
k |
|
sf (k,t) ( )k . |
|
Существование стационарной траектории (решения), то есть такой траектории, что Уравнение для нахождения стационарной траектории:
k(t)
const
.
sf (k |
* |
) ( )k |
* |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Поставим задачу оптимизации, в том случае, когда |
f (k) |
|
|
|
||||||
имеет место строгая выпуклость вверх, причем |
|
|
|
|
||||||
|
|
|
: |
|
|
|
|
|
|
|
sf (0) k |
|
|
|
|
|
|
|
|||
c c(k*) c(k *(s)) sup -задача оптимизации |
|
|
|
|
||||||
|
k* 0 |
0 s 1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
Здесь |
c(k*) (1 s) f (k*) f (k*) ( )k * в точке k*, |
|
|
|
||||||
так как в этой точке sf (k*) ( )k *. |
|
|
|
|
||||||
|
|
|
|
|
|
|
это |
|
|
|
Отсюда выписываем c (k*) f (k*) ( ) 0 |
|
|
|
|||||||
необходимое условие экстремума. Здесь используется |
|
|
|
|||||||
правило дифференцирования сложной функции: |
|
|
|
|
||||||
c (k *(s)) c (k*) (k*) 0 , |
(k* ) 0 – можно на этот |
|
|
|
||||||
s |
|
|
|
|
s |
s |
|
|
|
|
множитель сократить, получаем |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
c (k*) 0 необходимое условие экстремума. |
|
|
|
|
||||||
«Золотое правило накопления» Фелпса |
|
|
|
|
||||||
Геометрическая форма золотого правила имеет вид: в оптимальной стационарной точке |
k ** касательная к |
|
||||||||
графику f (k) |
параллельна секущей.Кроме того, если вычислить вторую производную |
|
|
0 |
||||||
c (k **) f |
(k **) |
|||||||||
есть точка максимума удельного потребления c(k**).
Действительно, в любой точке k* выполняется равенство sf (k*) ( )k * на стационарной траектории, |
|||||||||||
поэтому s |
( )k * |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
f (k*) |
|
|
|
|
|
|
|
|
|
|
Затем в точке k* выполняется равенство |
|
|
|
– |
( ) 0 |
. – необх. условие экстремума. |
|||||
c (k **) f |
(k **) |
||||||||||
Найдем оптимальную норму накопления: |
s ** |
( )k ** |
|
f (k **)k ** |
X |
(K **, L **) |
эластичность |
||||
f (k **) |
f (k **) |
|
EK |
||||||||
|
|
|
|
|
|
|
|
|
|||
, то
ВВП по капиталу (или по ОПФ).
Тогда s ** E X (K **, L K
РСС).
Рассмотрим пример. Для ПФ Кобба – Дугласа s ** FK , 1 s **
**) .Оптимальная норма накопления равна эластичности ВВП в точке k **( в рамках
имеем:
EL |
1 . |
F |
|
20. Модель РСС с учетом научно-технического прогресса и с учетом запаздывания фондоообразования. Модель РСС с учетом научно-технического прогресса.
НТП – совокупность всех явлений и мероприятий, которые приводят к повышению выпуска продукции без повышения используемых ресурсов.
Автономный НТП – рост эффективности использования ресурсов не зависит от капитала и труда, а привносится извне и выражен в зависимости ПФ от времени.
Общий вид ПФ с учетом автономного научно-технического прогресса: |
F(K, L,t) F0 (AK (t)K(t), AL (t)L(t)) |
|
F0 – ПФ степени однородности один (линейно однородная функция), |
AK (t) – эффективность, темп роста |
|
использования капитала, AL (t) |
– эффективность, темп роста использования труда, KЭ (t) AK (t) K(t) – |
|
эффективный капитал, LЭ (t) |
AL (t) L(t) – эффективный труд. |
|
Нейтральный НТП – автономный НТП называется Ф-нейтральным, если для некоторой функции Ф выполнено
Y |
Y |
, hLK |
, LK ) 0 |
, Y – ЧВП, y |
Y |
– производительность труда, k |
K |
– |
|
|
||||
равенство Ф( y, k,YL ,YK , EL |
, EK |
L |
L |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
фондовооруженность, Y |
Y и Y |
|
|
Y |
– предельные производительности труда и капитала, EY |
и EY |
– |
|||||||
|
|
|||||||||||||
L |
L |
K |
|
K |
|
|
|
L |
|
K |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
эластичности по труду и капиталу , |
hLK |
|
K |
– предельная норма замещения труда капиталом, LK |
– |
|
||||||||
L |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
эластичность замещения труда капиталом.
1) Нейтральный НТП по Хиксу: рост экономической эффективности вследствие совершенствования техники, сопровождающийся неизменным распределением ЧВП между трудом и капиталом: h hLK (k) , то есть предельная норма замещения зависит от капиталовооруженности, в этом случае ПФ имеет следующий вид:
F(K, L,t) F0 (A(t)K, A(t)L) = A(t)F0 (K, L) , F0 (K, L) – линейно однородная ПФ, AK AL A – отдача капитала и труда одинакова. Нейтральный НТП по Хиксу означает равнодобавляющий, симметричный научно-
технический прогресс, нейтральный по труду и капиталу: |
F (K, L,t) |
A(t) f0 |
(k) , A(t) |
– темп роста |
|
L |
|||||
|
|
|
|
производительности, f0 (k) – производительность без учета НТП.
2) Нейтральный НТП по Харроду: рост экономической эффективности вследствие совершенствования техники
при неизменности средней и предельной производительности капитала: YK |
|
Y |
|
Y |
, |
K |
|
|
|||
|
|
|
K |
|
Y |
|
Y |
|
– средний продукт, то есть предельный продукт капитала зависит от среднего |
K |
– предельный продукт, |
|
|
|
|
K |
|
|
|
|
|
|
продукта. ПФ в этом случае может быть записана в виде: F(K, L,t) F0 (K, AL (t)L) = F0 (K, LЭ (t)) . Нейтральный НТП по Харроду означает фондосберегающий (капиталосберегающий), трудоемкий, трудодобавляющий, трудорасходующий и, кроме того, удовлетворяет равенствам:
F (K, L,t) |
F0 |
(k, AL |
(t)) = AL |
(t)F0 |
|
k |
|
L |
|
A |
(t) |
||||
|
|
|
|
|
|||
|
|
|
|
|
L |
|
|
Производительность эффективного труда:
,1 |
|
A (t) |
|
|
|||
|
L |
||
|
|
|
|
F (K, L,t) |
|||
|
A (t) L |
||
|
|
L |
|
f0 |
|
|
|
|
|
F |
|
|
0 |
k |
|
|
A |
(t) |
|
L |
|
|
(k |
Э |
(t |
|
|
|
.
),1)
=
f |
0 |
(k |
Э |
(t)) |
|
|
|
,
k |
|
|
K |
|
Э |
L |
|||
|
|
|||
|
|
|
||
|
|
|
Э |
|
K |
A |
(t) L |
L |
|
.
3) Нейтральный НТП по Солоу: рост экономической эффективности вследствие совершенствования техники
при неизменности средней и предельной производительности труда:
Y |
|
Y |
|
||
L |
|
L |
|
|
Y |
|
|
|
|
L |
,
предельный продукт труда зависит от среднего продукта труда. Нейтральный НТП по Солоу означает трудосберегающий, капиталоемкий, фондоемкий, капиталобавляющий, капиталорасходующий и, кроме
того,удовлетворяет равенствам: |
F(K, L,t) F (A (t)K, L) = F (K |
Э |
(t), L) , |
|||||||||||||
|
|
|
|
|
|
|
|
0 |
|
K |
0 |
|
||||
|
F (K, L,t) |
F (k |
|
(t),1) = f |
( A |
(t)k) , k |
|
|
KЭ |
|
|
AK (t)K |
. |
|
|
|
|
L |
0 |
Э |
0 |
K |
|
Э |
|
L |
|
L |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Таким образом, в моделях РСС оптимальное удельное потребление может расти за счет научно-технического прогресса.