

Управляемость автомобиля
Под управляемостью понимают способность автомобиля двигаться по заданной траектории с требуемой точностью при воздействии водителя на механизм управления.
Управляемость обусловлена двумя свойствами машины:
курсовой устойчивостью при неуправляемом движении;
реакцией на управляющее воздействие водителя.
Кинематика поворота автомобиля
Существуют следующие способы поворотаколесной машины.
Поворот передних управляемых колес.
Совместный поворот передних и задних управляемых колес.
Поворот бортом без управляемых колес за счет отключения передачи вращающего момента на правые или левые неуправляемые колеса и торможение колес, внутренних по отношению к кривой поворота. Поворот без управляющих колес может быть осуществлен созданием разных скоростей вращения колес левого и правого бортов машины (по аналогии с гусеничной машиной).
Поворот путем комбинации рассмотренных выше способов.
Поворот за счет поворота передней части остова машины при сочлененной раме.
Третий способ поворота (бортом) имеет смысл использовать на машинах со всеми одинакового размера ведущими колесами большого диаметра. При этом упрощается привод к ведущим колесам и компоновка передних колес, однако, повышается износ шин.
На рис.8 схематически показан поворот колесной машины с управляемыми передними колесами (наиболее типичный вариант).
Мгновенный цент поворота О1 находится в точке пересечения перпендикуляров к векторам скоростей движения колес. Расстояние от центра поворотаО1до оси заднего моста автомобиля принято называть радиусом поворотаR = L·ctg α. При повороте передних управляемых колес машины на одинаковый угол такое пересечение будет невозможно, так как перпендикуляры к векторам скоростей этих колес будут параллельны.
В этом случае движение на повороте сопровождалось бы скольжением управляемых колес вбок, управляемость машины ухудшалась бы, а износ шин и сопротивление движению возросли.
Как следует из рис.8, чистое качение управляемых колес машины без скольжения при движении на криволинейных участках возможно лишь в том случае, если между углами поворота внутреннего θв(ближнего к центру поворота) и внешнегоθн(удаленного от центра поворота) колес будет следующее соотношение:
ctg θв = ОС/ВС;ctg θн = ОD/АD; разность этих выражений:
![]() ,
,
где θвиθн– соответственно углы поворота внутреннего и внешнего управляемых колес;
l– расстояние между осями шкворней поворотных цапф (приближенно может быть принято равным ширине колеиВ);
L– база машины.
Выполнение этого условия достигается с помощью шарнирного четырехзвенника, называемого рулевой трапецией, соединяющей между собой управляемые колеса. Подбирая соответствующие значения параметров рулевой трапеции, геометрию элементов и кинематику в целом, получают соотношение между угламиθвиθн, близкое к теоретическому. Однако рулевая трапеция не может обеспечить точно заданное (теоретическое) соотношение между углами поворота колес при различных их величинах, в тех пределах, в которых это необходимо на автомобилях.
Отклонение от теоретических значений углов поворота друг от друга тем меньше, чем правильнее выбраны размеры звеньев, составляющих рулевую трапецию.
При крутых поворотах отклонение действительных углов поворота колес от теоретических – наибольшее. Однако и в этом случае по соображениям безопасности (надежности управления) оно не должно превосходить 1,50.
Установим зависимость между радиусом поворота R, базой машиныLи углом поворота управляемых колесα. Если пренебречь небольшим отличием углов поворота управляемых колес и считать, чтоθв=θн=θ, то, воспользовавшись схемой рис.8, можно записать следующую зависимость:
![]() .
.

Рис.8. Схема поворота автомобиля с управляемыми передними колесами.
Следовательно, угол поворота колес при движении по кривой определяется радиусом её кривизны. Для малых значений угла α формула примет вид (tg θ≈θ):
![]() ,
,
где θ- средний угол поворота управляемых колес в радианах.
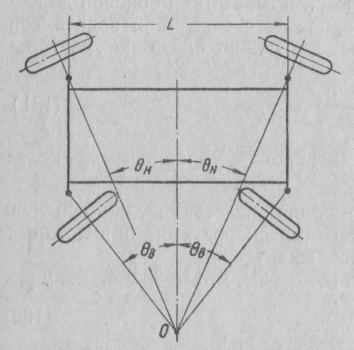
Рис.9. Схема поворота машины с задними и передними управляемыми колесами.
Уменьшение радиуса поворота может быть получено в том случае, если все колеса машины будут управляемы (второй способ поворота), тогда (рис.9):
![]()