

Динамика поворота. Силы, действующие на управляемые колеса
Рассмотрим случай, когда ведущими являются колеса задней оси. Касательная сила тяги задних колес передается на остов автомобиля в виде равнодействующейРк, направленной вперед вдоль оси машины (рис.10).
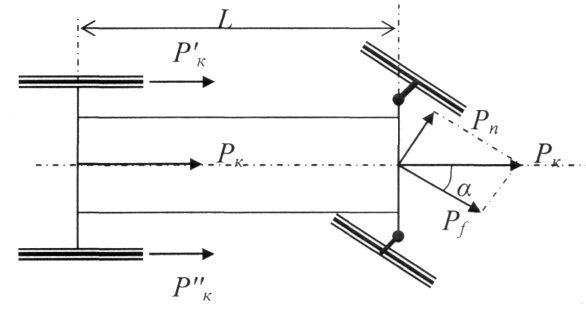
Рис.10. Схема сил, действующих на управляемые колеса заднеприводного автомобиля.
Эта сила передается на передний мост и передние колеса. В пятне контакта передних колес с дорогой возникают реакции. Равнодействующая этих реакций Rкравна толкающей силеРк.
Составляющая Рfтолкающей силыРкзатрачивается на преодоление силы сопротивления качению колес. СилаРfзависит от угла поворота колесα. Из рис. 10 видно, что при одинаковой толкающей силеРксоставляющаяРf (Рf=Рк · cosα) меньше при более крутом повороте.
Известно, что сила сопротивления качению колеса, повернутого под углом к направлению движения, повышается с увеличением угла его поворота, а активная сила Рf, толкающая колесо, уменьшается. Следовательно, баланс сил и скорость поступательного движения колеса можно сохранить на повороте (оставив её такой же, как при прямолинейном движении) только за счет увеличения касательной силы тягиРкна ведущих колесах, то есть путем повышения момента двигателя без перехода на пониженную передачу.
Поворот возможен только в том случае, когда сцепление управляемых колес с почвой больше толкающего усилия:
G1φ > Рк,
где G1- вертикальная нагрузка, действующая на управляемые колеса;
φ- коэффициент сцепления колес с опорной поверхностью дороги.
Учитывая, что Рк =Рf/cosα(рис.8), можно записать:
φ > Рf/ G1cosα или:
φcosα >f , (2)
где f– коэффициент сопротивления качению колеса.
Из этого выражения видно, что поворот автомобиля может быть осуществлен только в том случае, если коэффициент сопротивления качению меньше произведению коэффициента сцепления на косинус угла поворота колес. Если сцепление колес с дорогой плохое и величина f больше этого произведения, то управляемые колеса будут двигаться юзом и поворот не может быть реализован, машина теряет управляемость. На скользкой дороге коэффициентыφиfблизки между собой, вследствие чего управляемость автомобиля снижается.
Ведущие колеса – передние управляемые.В этом случае поворачивающий момент в тяговом режиме работы создается силами тяги передних управляемых колес (рис.11).
Условие осуществления поворота автомобиля с передними ведущими колесами (по аналогии с рассмотренным выше случаем) будет иметь вид:
G1φ > Рк .
Разделив обе части неравенства на силу тяжести, приходящуюся на переднюю ось, получим:
φ > Рк /G1илиφ > f.
Если сопоставить это выражение с неравенством (2), то можно сделать вывод, что устойчивость по сцеплению с дорогой автомобиля с передними ведущими колесами в сравнении с автомобилем, имеющим задние ведущие колеса, выше и не зависит от радиуса (угла) поворота. У переднеприводного автомобиля не нарушается на повороте баланс сил толкающей силы Рки сопротивления качениюРf, как это имеет место у заднеприводного автомобиля. Заметим, что эти примеры рассмотрены без учета инерционных сил. Влияние этих сил на управляемость автомобиля будет отрицательным в обоих случаях.
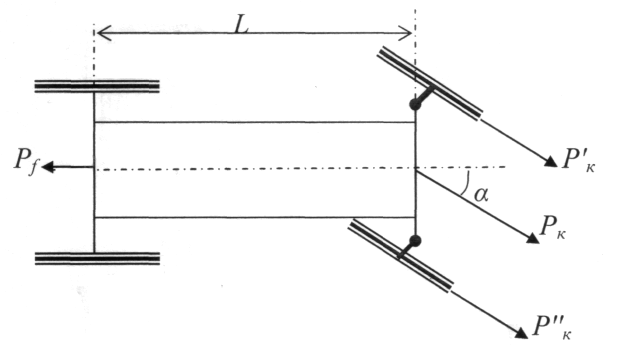
Рис.11. Схема сил, действующих на управляемые колеса переднеприводного автомобиля.
Из рис.10 видно, что движение заднеприводной машины характеризуется толкающим режимом работы задней оси по отношению к передней. Для переднеприводного автомобиля (рис.11) тянущий режим обеспечивается передней осью. Из теории регулирования известно, что тянущие системы более устойчивы.