

КР ТАУ
.pdfЧАСТОТНЫЙ СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
1. ЦЕЛЬ КУРСОВОЙ РАБОТЫ
Целью курсовой работы по дисциплине «Теория автоматического управления» является:
−закрепление теоретических знаний, полученных при изучении курса;
−развитие навыков самостоятельного решения вопросов частотного синтеза при проектировании систем автоматического управления;
−практическое применение знаний по моделированию в среде Simulink MatLab.
2. СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ
Содержанием курсовой работы является определение структуры и параметров регулятора замкнутой системы автоматического управления методом логарифмических частотных характеристик.
1. Анализ динамических свойств исходной системы управления (построение переходного процесса исходной системы; в случае если она является устойчивой,
определение времени переходного процесса и величины перерегулирования; сравнение этих значений с заданными параметрами)
2. Анализ частотных свойств исходной системы управления (построение располагаемой логарифмической амплитудной и фазовой частотных характеристик
(РЛАХ, РЛФХ); в случае если исходная система является устойчивой, определение запаса устойчивости по фазе).
3. Построение желаемой логарифмической амплитудной и фазовой частотных характеристик (ЖЛАХ, ЖЛФХ)
(расчет сопрягающих частот и желаемого коэффициента передачи; определение желаемой передаточной функции; построение ЖЛАХ; определение запаса устойчивости желаемой системы).
4. Синтез последовательного корректирующего звена (определение передаточной функции корректирующего звена; построение логарифмической амплитудно-частотной характеристики корректирующего звена).
5. Анализ динамических свойств скорректированной системы управления (построение переходного процесса скорректированной системы; определение времени
переходного процесса и величины перерегулирования; сравнение этих значений с заданными параметрами).
6. Выводы.

3.МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ
3.1.Исходные данные
Вкачестве исходных данных для расчетов используются: передаточная функция замкнутой системы W(s);сведения о качестве переходного процесса – время переходного процесса Тпп, перерегулирование σ, показатель колебательности М; сведения о качестве работы -
допустимая динамическая ошибка ед, максимальная скорость в динамическом режиме Ω максимальное ускорения в динамическом режиме ε max .
Варианты заданий представлены в таблице Приложения.
3.2. Метод логарифмических амплитудных характеристик Если исходная (располагаемая) динамическая система, описываемая передаточной
функцией (ПФ) W(s) (рис.1a), является неустойчивой или не удовлетворяет заданным показателям качества, то ее поведение можно улучшить при включении последовательного корректирующего устройства с ПФ K(s) (рис.1б).
X(s) |
Y(s) |
X(s) |
K(s) |
Y(s) |
W(s) |
|
- |
W(s) |
|
- |
|
|
|
|
Рис. 1. Исходная и скорректированная система |
|
|||
Частотный метод синтеза основан на построении реальных и желаемых частотных характеристик системы, их сопоставлении и выборе на этой основе структуры и параметров корректирующих устройств.
Важнейшим этапом частотного синтеза является формирование желаемой АЧХ системы. ПФ скорректированной (желаемой) системы можно представить в виде произведения
G(s) = W (s)K (s)
Откуда следует:
K (s) = |
G(s) |
(1) |
|
W (S) |
|||
|
|
При использовании ЛАЧХ имеем
LK = 20lg K ( jω ) , LG = 20lg G( jω ) и LW = 20lgW ( jω ) ,
откуда следует LK = LG − LW
Рассмотрим требования к желаемой ЛАЧХ.
Низкочастотная часть ЛАЧХ формируется в соответствии с требованиями к точности, которую можно оценить по воспроизведению системой гармонического входного сигнала. Пусть на вход подан сигнал:
g1 (t) = gmax sin(ω g t) ,
где gmax - амплитуда гармонического сигнала.
Известно, что ЛАХ системы в области низких частот должна быть расположена не ниже контрольной точки Ak с координатами
ω k = ω g ; |
L(ω k ) = 20lg |
gmax |
, |
(2) |
|
||||
|
|
xmax |
|
|
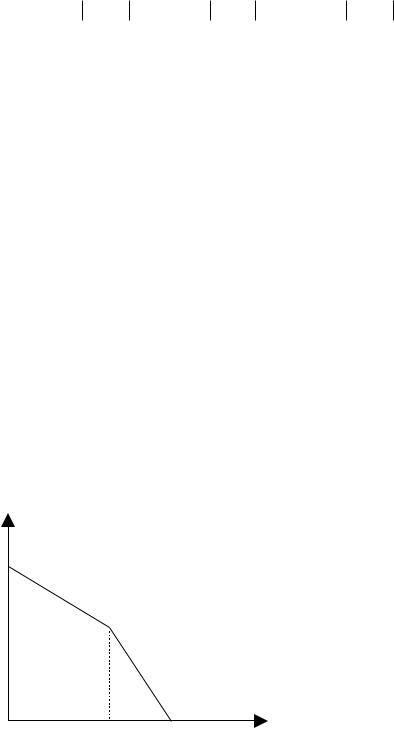
где xmax - максимальная ошибка следящей системы (рис. 2).
L(ω) дб
-20 дб/дек
L(ωk) 













 Ak
Ak
-40 дб/дек
ωk |
ω0 |
ω (рад/с) |
Рис. 5.2. Запретная область на плоскости ЛАЧХ
Для нахождения частоты и амплитуды эквивалентного гармонического воздействия можно воспользоваться требуемыми значениями максимальной скорости и ускорения системы
ω k |
= |
ε |
max |
; |
gmax = |
Ω |
2 max |
(3) |
|
Ω |
max |
ε max |
|||||||
|
|
|
|
|
|||||
где -Ω max - максимальная скорость, ε max - максимальное ускорение.

Среднечастотная часть ЛАХ должна пересекать ось частот с наклоном -20 дБ/дек, причем этот отрезок ЛАХ обычно ограничивается с левой стороны отрезком с наклоном -40 дБ/дек, а с правой -40 или -60 дБ/дек, - в зависимости от наклона ЛАХ нескорректированной системы.
Для определения границ среднечастотного участка вводится понятие базовой частоты
ω 0 = εxmax .
max
По базовой частоте вычисляется частота среза
ω |
с |
= |
|
|
M |
|
|
ω |
0 |
. |
|
|
M − |
|
|
|
|||||||||
|
|
|
|
1 |
|
|
|
|||||
По частоте среза определяются частоты ω2, ω3, соответствующие началу и концу |
||||||||||||
среднечастотного участка |
|
|
||||||||||
|
|
M −1 |
|
; |
|
M 1 |
2. |
|||||
|
||||||||||||
|
2 |
|
|
|
M |
|
|
c |
|
3 |
M |
c |
|
|
|
|
|
|
|
|
|
|
|
||
Типовая структура желаемой ЛАЧХ изображена на рис. 3.
LG
-20 дб/дек
L(ωk) 







 -40 дб/дек
-40 дб/дек
|
ωc |
ω3 |
ωk |
ω2 ω0 |
ω (рад/c) |
|
|
-40 дб/дек |
Рис. 3. Построение желаемой ЛАЧХ

Высокочастотная часть ЛАЧХ (справа от ω3) не оказывает влияния на точность системы и ее динамические характеристики. Обычно наклоны высокочастотной и низкочастотной частей желаемой ЛАЧХ стремятся сделать такими же, как у исходной динамической системы. При этом необходимое количество сопрягающих частот зависит от степени исходной передаточной функции. Значения этих частот в высокочастотной области выбирают исходя из следующих условий:
4 3 2 ; 5 4 2 ...
Желаемой ПФ на рис. 3 соответствует структура:
G(s) = |
k(τ 2 s + 1) |
|
, |
(4) |
|
s(Tk s + 1)(T3 s |
+ 1) |
||||
|
|
|
где k - коэффициент усиления; а постоянные времени Т и τ соответствуют сопрягающим частотам:
τ 2 = |
1 |
, |
Tk = |
1 |
, |
T3 = |
1 |
. |
|
|
|
||||||
|
ω 2 |
|
ω k |
|
ω 3 |
|||
В общем случае структура ПФ, соответствующей желаемой ЛАХ, будет иметь вид
|
|
|
|
|
|
|
æ |
1 |
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
k × ç |
|
|
s + |
1÷ |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
ç |
ω2 |
|
|
|
÷ |
|
|
|
|
||
G(s) = |
|
|
|
|
|
|
è |
|
|
|
ø |
|
|
|
, |
|||
æ |
1 |
ö æ |
1 |
|
|
ö |
æ |
1 |
ö æ |
1 |
ö |
|
||||||
|
|
|
|
|
||||||||||||||
|
sç |
|
|
s + 1÷ ç |
|
|
|
s + |
1÷ |
ç |
|
|
|
s + 1÷ ç |
|
s + 1÷ ... |
|
|
|
ω |
|
ω |
|
|
|
ω |
|
ω |
|
||||||||
|
ç |
k |
÷ ç |
3 |
|
|
÷ |
ç |
|
4 |
÷ ç |
÷ |
|
|
||||
|
è |
|
ø è |
|
|
|
ø |
è |
|
|
ø è |
5 |
ø |
|
|
|||
где k – коэффициент передачи желаемой системы:
LG ( ω = 1 )
k = 10 20
(5)
(6)
В случае когда величина ωk< 1с-1, величина коэффициента передачи должна быть больше, чем получается по выражению (4).
При построении желаемой ПФ следует помнить, что изменение коэффициента усиления k поднимает или опускает всю ЛАЧХ, полиномы числителя изменяют наклоны асимптот ЛАЧХ на +20 дБ/дек; а каждый полином знаменателя изменяет наклоны на -20 дБ/дек.
ПФ нескорректированной системы, в общем случае, будет иметь вид
W(s) = |
|
(τ 1s + |
1) |
|
, |
(7) |
sr (T s + |
1)(T s + |
1)(T s + 1)... |
||||
1 |
2 |
3 |
|
|
|
|

где r- порядок астатизма нескорректированной системы, τ1, T1, Т2, Т3…-постоянные времени числителя и знаменателя, соответственно.
Тогда ПФ корректирующего устройства в соответствии с (1) будет определяться выражением
|
|
|
|
æ |
1 |
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
kç |
|
|
|
|
s |
+ 1÷ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ω |
|
|
|
|
|
|
|
sr (T s + 1)(T s + 1)(T s + 1)... |
|
||||||||||
|
|
|
|
ç |
2 |
|
|
÷ |
|
|
|
|
|
|||||||||
Wk (s) = |
|
|
|
è |
|
|
|
ø |
|
|
|
´ |
1 |
|
2 |
3 |
|
(8) |
||||
æ |
1 |
ö æ |
|
|
1 |
|
|
|
|
ö æ |
1 |
ö |
|
|
(τ |
1 |
s + 1) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
sç |
s + 1÷ ç |
|
|
|
|
s + |
1÷ ç |
s + 1÷... |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
ç |
ωk |
÷ ç |
|
ω3 |
|
|
|
|
÷ ç |
ω4 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
è |
ø è |
|
|
|
|
|
ø è |
ø |
|
|
|
|
|
|
|
|
|
||||
Рассмотрим пример частотного синтеза. Пусть система описывается ПФ вида:
W( s ) = |
20 |
s(0.1s + 1)(0.05s + 1) |
Необходимо провести частотный синтез корректирующего звена, исходя из следующих требований к системе:
·xmax .= 0,033град;
·Ω max = 30 град/с;
·ε max = 30 град/с2,
·М = 1.5.
Определим параметры желаемой ПФ.
Амплитуда и частота гармонического воздействия определяется по выражению 3).
ω k = |
30 |
= 1с− 1 ; |
gmax = |
302 |
= 30град . |
|
30 |
|
|
30 |
|
Координата контрольной точки Ак определяется по выражению (2)
L(ω |
k ) = 20 lg |
30 |
|
= |
59.08дБ . |
|
|
|
|
||||||
0.033 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Границы среднечастотной области: |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ω 0 = |
|
30 |
= |
30с-1 |
, |
ω c = |
1.5 |
|
|
30 = 51.96c− 1 . |
|||||
0.033 |
1.5 - |
1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||
2 |
1.5−1 |
51.96 ; |
2=10с−1 ; |
|
|||
1.5 |
|
|
|
3 1.5 1 |
51.96 2 ; |
3=200с−1 ; |
|
1.5 |
|
|
|
В высокочастотной области желаемая ЛАХ должна повторять наклон ЛАХ нескорректированной системы, а именно –60дБ/дек., поэтому выбираем
ω4=400 с-1 .
Желаемый коэффициент усиления
k = 10[59.08/20] = 900
Желаемая ПФ будет иметь вид
G s = |
900 0.1s |
1 |
|
|
|
. |
|
s s 1 0.005s 1 |
0.0025s 1 |
||
ПФ корректирующего устройства
W k s = |
900 0.1s 1 |
× |
s 0.1s 1 0.05s 1 |
= |
45 0.1s 1 2 0.05s 1 |
s s 1 0.005s 1 0.0025s 1 |
|
s 1 0.005s 1 0.0025s 1 |
|||
|
20 |
|
|||
Для анализа качества переходной характеристики на выходе скорректированной системы (рис.4), синтезированной методом ЛЧХ, необходимо определить время переходного процесса и величину перерегулирования.
В данном примере Тпп=0.169с; σ=22.5%, что удовлетворяет заданным требованиям.
4. ИСПОЛЬЗОВАНИЕ MATLAB
Для создания модели данных систем необходимо проделать следующие действия:
1.Открыть окно новой модели Simulink, нажав кнопку Create a new model.
2.Расположить это окно рядом с окном браузера библиотек.
3.Из раздела библиотеки Math, и Continuous перенсти в окно модели блоки для описания ПФ W(s), G(s), Wk(s) .
4.Щелкнув дважды по блокам Transfer Fcn, в появившемся окне параметров задать
вектор числителя Numerator и знаменателя Denominator коэффициентов

соответствующих ПФ.
5.Выполнить соединение между блоками.
6.В меню Tools выбрать команду Linear analysis.
7.Из появившегося окна Model Inputs and Outputs извлечь начальную и конечную точки анализируемых моделей и установить их на входы и на выходы (рис..4).
8.В окне LTI Viewer в меню Tools командой Plot Configurations выбрать вид отображаемого результата и для получения логарифмических характеристик установить функцию bode (система должна быть разомкнутой). Для получения переходных процессов необходимо установить функцию step (система с отрицательной обратной связью).
9.Для запуска анализа необходимо в окне LTI Viewer в меню Simulink выбрать команду Get Linearized model.
10.В появившемся окне с результатами можно с помощью одного нажатия правой кнопки мыши установить характерные точки (Characteristics), сетку (Gird), а так же выбрать увеличение (Zoom).
11.Для изображения полученных характеристик на одном графике необходимо один раз нажать правую кнопку мыши и в пункте I/O Grouping выбрать All.
Результаты представлены на рис.4.

Рис. 4. Логарифмические и переходные характеристики в среде Simulink MatLab.
5. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ОФОРМЛЕНИЮ КУРСОВОЙ РАБОТЫ
Пояснительная записка должна быть оформлена в соответствии с требованиями ГОСТ и состоять из титульного листа, оглавления, технического задания, разделов с расчетами и графиками (см. п.2), а также выводов о получившихся результатах.
Библиографический список
1.Бессекерский В.А., Попов Е.П. Теория автоматического регулирования. М.: Наука, 1975. 768с.
2.Попов Е.П. Теория линейных систем автоматического регулирования и управления. М.: Наука, 1989. 304с.
3.Дорф Р., Бишоп Р. Современные системы управления. М: Лаборатория Базовых знаний,
2002. 832с.
4.Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. М.: Бином, 2004. 911с.
5.Лазарев Ю.Ф. MATLAB 5.x. Киев: BHV, 2000.
6.Дьяконов В. Simulink4. Специальный справочник. СПб.: Питер, 2002.
7.Медведев В.С., Потемкин В.Г. Control system toolbox. MatLab 5 для студентов. М. : ДИАЛОГ-МИФИ, 1999. 287с.