

Senikov_POE 3к
.pdfНомер опыта |
X1 |
X2 |
Y |
1 |
-1 |
-1 |
y1 |
2 |
-1 |
+1 |
y2 |
3 |
+1 |
-1 |
y3 |
4 |
+1 |
+1 |
y4 |
При заполнении матрицы планирования значения уровней факторов, в целях упрощения, обозначают соответствующими знаками, а цифру 1 опускают. С учетом взаимодействия факторов х1 и х2 таблицу 5.1 можно переписать следующим образом:
Таблица 5.2. Матрица планирования эксперимента с учетом взаимодействий
Номер опыта |
X1 |
X2 |
X1X2 |
Y |
1 |
- |
- |
+ |
y1 |
2 |
- |
+ |
- |
y2 |
3 |
+ |
- |
- |
y3 |
4 |
+ |
+ |
+ |
y4 |
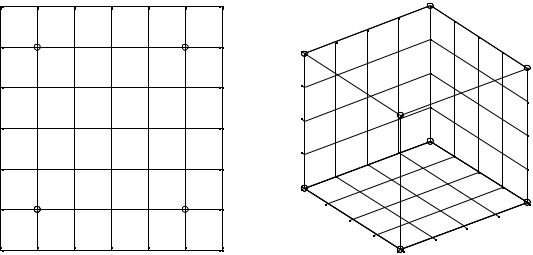
Каждый столбец в матрице планирования называют вектор-столбцом, а каждую строку – вектор-строкой. Таким образом, в таблице 5.2 мы имеем два векторастолбца независимых переменных и один вектор-столбец параметра оптимизации. То, что записано в алгебраической форме, можно изобразить графически. В области определения факторов находится точка, соответствующая основному уровню, и проводят через нее новые оси координат, параллельные осям натуральных значений факторов. Далее выбирают масштабы по новым осям так, чтобы интервал варьирования для каждого фактора равнялся единице. Тогда условия проведения опытов будут соответствовать вершинам квадрата, при k=2, и вершинам куба, при k=3. Центрами этих фигур является основной уровень, а каждая сторона равна двум интервалам (см. рис.5.1). Номера вершин квадрата и куба соответствуют номерам опытов в матрице планирования. Площадь, ограниченная этими фигурами, называется областью эксперимента. По аналогичному принципу располагаются экспериментальные точки при k>3.
21
1.5 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
0.5 |
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
-0.5 |
|
|
-0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
-1 |
|
|
|
|
|
|
0.5 |
1 |
|
|
|
|
|
|
|
|
0 |
0.5 |
|
|
|
|
|
|
|
|
0 |
||
|
|
|
|
|
|
|
-0.5 |
||
-1.5 |
|
|
|
|
|
|
-0.5 |
||
-1 |
-0.5 |
0 |
0.5 |
1 |
1.5 |
-1 |
|||
-1.5 |
-1 |
Рис.5.1. Расположение точек в факторном пространстве для ПФЭ при k=2 (слева) и k=3 (справа).
5.2. Свойства полного факторного эксперимента типа 2К
Полный факторный эксперимент относится к числу планов, которые являются наиболее эффективными при построении линейных моделей. Эффективность, иначе оптимальность, полного факторного эксперимента достигается за счет ниже перечисленных его свойств.
Симметричность относительно центра эксперимента: алгебраическая сумма элементов вектора -столбца каждого фактора равна нулю, или 0 где i = 1, 2, …, k – номер фактора, N – число опытов.
Условие нормировки: сумма квадратов элементов каждого столбца равна числу опытов, или N. Это следствие того, что значения факторов в матрице задаются +1 и –1.
Ортогональность матрицы планирования: сумма почленных произведений любых двух вектор-столбцов матрицы равна нулю.
Ротатабельность: точки в матрице планирования подбираются так, что точность предсказаний значений параметра оптимизации одинакова на равных расстояниях от центра эксперимента и не зависит от направления. Выполнение этих условий обеспечивает минимальную дисперсию коэффициентов регрессии, но и равенство дисперсии. Это облегчает статистический анализ результатов эксперимента.
5.3. Расчет коэффициентов регрессии
Построив матрицу планирования, осуществляют эксперимент. Получив экспериментальные данные, рассчитывают значения коэффициентов регрессии.
Значение свободного члена a0 находят как среднее арифметическое всех значений параметра оптимизации в матрице:
22
N
yg
a |
0 = |
g=1 |
, |
(5.1) |
|
||||
|
|
N |
|
|
где: yg - значение параметра оптимизации в g-м опыте, N – число опытов в матрице.
Линейные коэффициенты регрессии рассчитывают по формуле
|
|
|
N |
|
|
|
|
|
xig yg |
, |
(5.2) |
|
a |
i = |
g=1 |
||
|
N |
||||
|
|
|
|
|
где xig - кодированное значение i-го фактора в g-м опыте.
Коэффициенты регрессии, характеризующие парное взаимодействие факторов, находят по формуле
N
xig xjg yg
a |
ij = |
g=1 |
|
. |
(5.3) |
|
|
||||
|
|
|
N |
|
|
Полное число всех возможных коэффициентов регрессии, включая а0, линейные коэффициенты и коэффициенты взаимодействий всех порядков, равно числу опытов полного факторного эксперимента.
Чтобы найти число взаимодействий некоторого порядка, можно воспользоваться формулой числа сочетаний
Cm = |
k! |
k |
m!(k m)! |
где: k – число факторов; m – число элементов во взаимодействии. Так, для плана 24 число парных взаимодействий равно шести. Отсюда видно, что с ростом числа факторов число возможных взаимодействий быстро растет.
5.4. Физический смысл взаимодействий
Пусть на некоторый химический процесс влияют два фактора: температура и время реакции. В области низких температур увеличение времени увеличивает выход продукта. При переходе в область высоких температур эта закономерность нарушается. Здесь необходимо уменьшить время реакции. Это и есть проявление эффекта взаимодействия.
5.5. Дробный факторный эксперимент – план типа 2(K-L)
Количество опытов в полном факторном эксперименте значительно превосходит число определяемых линейных коэффициентов. Так как наибольшую значимость обычно имеют линейные коэффициенты, а коэффициенты взаимодействий, начиная с тройных и выше, часто не значимы, то получается, что полный факторный эксперимент обладает избыточностью опытов. Было бы заманчивым сократить число опытов за счет той информации, которая не очень существенна при построе-
23
нии линейных моделей. При этом нужно стремиться к тому, чтобы матрица планирования не лишилась своих оптимальных свойств. Сделать это не так просто, но все же возможно. Рассмотрим пути минимизации числа опытов.
5.6. Минимизация числа опытов
Еще раз рассмотрим матрицу планирования типа 22 (см. табл.5.3).
Таблица 5.3. Матрица планирования типа 22
Номер опыта |
X0 |
X1 |
X2 |
(X3) = X1X2 |
Y |
1 |
+ |
+ |
+ |
+ |
y1 |
2 |
+ |
- |
+ |
- |
y2 |
3 |
+ |
+ |
- |
- |
y3 |
4 |
+ |
- |
- |
+ |
y4 |
Пользуясь таким планированием, можно вычислить четыре коэффициента и представить результаты эксперимента в виде неполного квадратного уравнения
y=a0+a1x1+a2x2+a12x1x2.
Если имеются основания считать, что в выбранных интервалах варьирования процесс может быть описан линейной моделью, то достаточно определить три коэффициента: a0, a1, a2. Остается одна степень свободы. Употребим ее для минимизации числа опытов. При линейном приближении a12 → 0 и вектор-столбец x1x2 можно использовать для нового фактора x3. Поставим этот фактор в скобках над взаимодействием x1x2 и посмотрим, каковы будут оценки коэффициентов. Здесь уже не будет тех раздельных оценок, которые были в полном факторном эксперименте. Оценки смешиваются следующим образом:
a1 → α1 + α23; a2 → α2 + α13; a3 → α3 + α12.
Если постулируются линейная модель, следовательно, все парные взаимодействия незначимы. Главное, найдено средство минимизации числа опытов: вместо восьми опытов для изучения трех факторов оказывается можно поставить четыре! При этом матрица планирования не теряет своих оптимальных свойств (ортогональность, ротатабельность и т.п.). Найденное правило можно сформулировать: чтобы сократить число опытов, нужно новому фактору присвоить вектор-столбец матрицы, принадлежащей взаимодействию, которым можно пренебречь. Тогда значения нового фактора в условиях опытов определяется знаками этого столбца. Мы рассмотрели самый простой случай. С увеличением числа факторов вопрос о минимизации опытов превращается в сложную задачу, и для определения ее требуется ввести новые определения и понятия: дробная реплика, генерирующее соотношение, определяющий контраст.
5.7. Дробная реплика
24
Поставив четыре опыта для оценки влияния трех факторов, мы воспользовались половиной факторного эксперимента 23, или «полурепликой». Если бы мы приравняли х3 к –х1х2, то получили бы вторую половину матрицы 23. В этом случае:
a1 → α1 - α23; a2 → α2 - α13; a3 → α3 - α12.
При реализации обеих полуреплик можно получить раздельные оценки для линейных коэффициентов (эффектов) и коэффициентов взаимодействия, как и в полном факторном эксперименте 23. Объединение этих двух полуреплик и есть полный факторный эксперимент 23. Матрица из восьми опытов для четырех факторного планирования будет полурепликой от полного факторного эксперимента 24, а для пятифакторного планирования – четвертьрепликой от 25. В последнем случае два линейных эффекта приравниваются к эффектам взаимодействия. Для обозначения дробных реплик, в которых L линейных эффектов приравнены к эффектам взаимодействия, удобно пользоваться условными обозначением 2(K-L). Так полуреплика от 26 запишется в виде 26-1, а четверть-реплика от 25 – в виде 25-2. Условные обозначения дробных реплик и количество опытов приведены в таблице 5.4.
Таблица 5.4. Условные обозначения дробных реплик и соответствующее число опытов
Число |
Дробная реплика |
Условное |
Число опытов |
|
факторов |
|
обозначение |
Для дробной |
Для полного |
|
|
|
реплики |
факторного экс- |
|
|
|
|
перимента |
3 |
1/2 –реплика от 23 |
23-1 |
4 |
8 |
4 |
1/2 –реплика от 24 |
24-1 |
8 |
16 |
5 |
1/4 –реплика от 25 |
25-2 |
8 |
32 |
6 |
1/8 –реплика от 26 |
26-3 |
8 |
64 |
7 |
1/16 –реплика от 27 |
27-4 |
8 |
128 |
5 |
1/2 –реплика от 25 |
25-1 |
16 |
32 |
6 |
1/4 –реплика от 26 |
26-2 |
16 |
64 |
7 |
1/8 –реплика от 27 |
27-3 |
16 |
128 |
8 |
1/16 –реплика от 28 |
28-4 |
16 |
256 |
9 |
1/32 –реплика от 29 |
29-5 |
16 |
512 |
10 |
1/64 –реплика от 210 |
210-6 |
16 |
1024 |
11 |
1/128 –реплика от 211 |
211-7 |
16 |
2048 |
12 |
1/256 –реплика от 212 |
212-8 |
16 |
4096 |
13 |
1/512 –реплика от 213 |
213-9 |
16 |
8192 |
14 |
1/1024 –реплика от 214 |
214-10 |
16 |
16384 |
15 |
1/2048 –реплика от 215 |
215-11 |
16 |
32768 |
5.8. Выбор полуреплик. Генерирующие соотношения и определяющие контрасты
При построении полуреплик 23-1 существует две возможности: приравнять х3 к +х1х2 или к –х1х2. Поэтому есть только две полуреплики 23-1 (табл. 5.5).
25
Таблица 5.5. Полуреплики плана типа 23-1
Номер опыта |
|
|
I. X3 = X1X2 |
|
|
|
х0 |
х1 |
|
х2 |
х1 х2 х3 |
|
|
|
|
|
|
1 |
+ |
+ |
|
+ |
+ |
2 |
- |
- |
|
+ |
+ |
3 |
+ |
- |
|
- |
+ |
4 |
- |
+ |
|
- |
+ |
Номер опыта |
|
|
II. X3 = - X1 X2 |
|
|
1 |
+ |
+ |
|
- |
- |
2 |
- |
- |
|
- |
- |
3 |
+ |
- |
|
+ |
- |
4 |
- |
+ |
|
+ |
- |
Для произведения трех столбцов матрицы I выполняется соотношение +1= х1 х2 х3, а для матрицы II: -1= х1х2х3. Это наглядно изображено в табл.5.5, в первом случае все знаки столбца произведений одинаковы и равны плюс единице, а во втором – минус единице. Символическое обозначение столбцов, равных +1 или –1, называется определяющим контрастом. Контраст помогает определять смешанные эффекты. Для того, чтобы определить, какой эффект смешан с данным, нужно помножить обе части определяющего контраста на столбец, соответствующий данно-
му эффекту. Так, если 1= х1х2х3, то для х1 имеем х1= х12х2х3= х2х3, т.к. всегда хi2 =1. Для х2 находим х2= х1х22х3= х1х3, для х3 получается х3= х1х2х32= х1х2.
Это значит, что коэффициенты линейного уравнения будут оценками
b1 β1 + β23; |
b2 β2 + β13; |
b3 β3 + β12. |
Соотношение, показывающее, с каким из эффектов смешан данный эффект, называется генерирующим соотношением. При выборе полуреплики 24-1 возможно восемь:
1) х4= х1х2; |
3) х4= х2х3; |
5) х4= х1х3; |
7) х4= х1х2х3; |
2) х4= -х1х2; |
4) х4= -х2х3; |
6) х4= -х1х3; |
8) х4= -х1х2х3. |
Разрешающая способность этих полуреплик различна. Так, реплики с первой по шестую имеют три фактора в определяющем контрасте, седьмая и восьмая по четыре. Реплики семь и восемь имеют максимальную разрешающую способность и называются главными. Разрешающая способность задается системой смешивания данной реплики. Она будет максимальной, если линейные эффекты смешаны с эффектами взаимодействия наибольшего порядка. Рассмотрим полуреплики, заданные определяющими контрастами 1= х1х2х3х4 и 1= – х1х2х3х4. Совместные оценки здесь определяются соотношениями:
х1= х2х3х4 |
х2= х1х3х4 |
х3= х1х2х4 |
х4= х1х2х3 |
х1= -х2х3х4 |
х2= -х1х3х4 |
х3= -х1х2х4 |
х4= -х1х2х3 |
|
|
26 |
|
х1х2= х3х4 |
х1х3= х2х4 |
х1х4= х2х3 |
х1х2 = -х3х4 |
х1х3 = -х2х4 |
х1х4 = -х2х3 |
Такой тип смешивания дает возможность оценивать линейные эффекты совместно с тройными эффектами взаимодействий, а двойные взаимодействия – совместно друг с другом. Здесь коэффициенты линейного уравнения будут оценками
b1 |
β1 + β234 , |
b3 β3 + β124 , |
b12 |
β12 + β34 , |
b14 β14 + β23. |
b2 |
β2 + β134 , |
b4 β4 + β123 , |
b13 |
β13 +β24 , |
|
Если полуреплики заданы генерирующими соотношениями х4= х1 х2 и х4= - х1 х2 , то в этом случае определяющими контрастами являются 1= х1 х2 х4 и 1= - х1 х2 х4. Некоторые эффекты смешиваем с парными взаимодействиями:
х1= х2х4 |
х2= х1х4 |
х3= х1х2х3х4 |
х4= х1х2 |
х1= -х2х4 |
х2= -х1х4 |
х3= -х1х2х3х4 |
х4= -х1х2 |
х1х3= х2х3х4 |
|
х2х3= х1х3х4 |
х3х4= х1х2х3 |
х1х3 = -х2х3х4 |
|
х2х3 = -х1х3х4 |
х3х4 = -х1х2х3 |
Разрешающая способность этих полуреплик ниже, чем у предыдущего примера. Здесь линейный коэффициент фактора х3 зависим от взаимодействии других факторов: b3 β3 + β1234 .
Выбор такой полуреплики разумен, если имеется априорная информация о большей значимости тройных взаимодействий по сравнению с парными или о незначимости трех парных взаимодействий х2х4, х1х4, х1х2. Из изложенного выше видно, что выбор дробной реплики требует много труда и терпения, знания значительной априорной информации, что не всегда возможно.
6.ПЛАНЫ ЭКСПЕРИМЕНТОВ ТИПА 3K и 3(K-L)
Внекоторых случаях приходиться анализировать факторы, имеющие более 2-
хуровней. Например, если предполагается, что влияние факторов на зависимую переменную нелинейное, то необходимо, по меньшей мере, 3 уровня для проверки ли-
нейных и квадратичных эффектов и взаимодействий. Ввиду стремительного числа опытов с ростом числа рассматриваемых факторов (например, N=34=81) планы типа 3K используют редко, вместо них используют планы типа 3(K-L) – аналоги дробного факторного эксперимента 2(K-L) [12].
6.1. Планирование экспериментов типа 3(K-L)
Общий механизм построения дробных факторных планов типа 3(K-L) очень схож с тем, который описан для 2(K-L) планов. Именно, отправляясь от полного факторного плана, взаимодействия используются для построения “новых” факторов с
27
помощью определения их уровней равными соответствующим членам взаимодействий. Например, рассмотрим следующий простой факторный план 3(3-1) (см. табл.6.1).
Таблица 6.1. Факторный план типа 3(3-1)
N |
X1 |
X2 |
X3 |
Y |
1 |
- |
- |
- |
y1 |
2 |
- |
0 |
+ |
y2 |
3 |
- |
+ |
0 |
y3 |
4 |
0 |
- |
+ |
y4 |
5 |
0 |
0 |
0 |
y5 |
6 |
0 |
+ |
- |
y6 |
7 |
+ |
- |
0 |
y7 |
8 |
+ |
0 |
- |
y8 |
9 |
+ |
+ |
+ |
y9 |
Как и в случае планов 2(K-L), план строится из полного факторного плана 3 – 1=2, чьи факторы перечислены в первых двух столбцах таблицы (факторы x1 и х2). Фактор х3 строится на основании взаимодействия х1х2 первых двух факторов. Значения фактора х3 вычисляются по формуле
х3 = 3 - mod3 (х1+х2),
где символ mod3(x) обозначает сравнение по модулю 3 (остаток от деления x
на 3).
Например, mod3(0)=0, mod3(1)=1, mod3(3)=0, mod3(5)=2 (3 – наибольшее число,
не большее 5, делящееся на 3; так что окончательно, 5-3=2) и так далее.
Если применить эту функцию к сумме столбцов х1 и х2 в таблице 6.1 можно получить третий столбец х3.
Анализ плана: см. раздел 6.4.
6.2. Планы Бокса-Бенкена
Эти планы конструируются комбинированием двухуровневых факторных планов с планами неполных блоков и имеют сложную смесь взаимодействий. Тем не менее, они экономичны, и, следовательно, особенно полезны в случаях, когда дорого проводить необходимые опыты. Исходные матрицы плана Бокса-Бенкена для 3-5 факторов приведены в Приложении 2.
Рассмотрим построение матрицы эксперимента для трех факторов (см.
табл.6.2).
Таблица 6.2. Исходная матрица (слева) и план эксперимента (справа) плана Бокса-Бенкена для трех факторов на трех уровнях
28
Исходная матрица |
|
|
План эксперимента |
|
||||
X1 |
X2 |
X3 |
|
N |
X1 |
X2 |
X3 |
Y |
±1 |
±1 |
0 |
|
1 |
-1 |
-1 |
0 |
y1 |
|
|
|
|
2 |
-1 |
+1 |
0 |
y2 |
|
|
|
|
3 |
+1 |
-1 |
0 |
y3 |
|
|
|
|
4 |
+1 |
+1 |
0 |
y4 |
±1 |
0 |
±1 |
|
5 |
-1 |
0 |
-1 |
y5 |
|
|
|
|
6 |
-1 |
0 |
+1 |
y6 |
|
|
|
|
7 |
+1 |
0 |
-1 |
y7 |
|
|
|
|
8 |
+1 |
0 |
+1 |
y8 |
0 |
±1 |
±1 |
|
9 |
0 |
-1 |
-1 |
y9 |
|
|
|
|
10 |
0 |
-1 |
+1 |
y10 |
|
|
|
|
11 |
0 |
+1 |
-1 |
y11 |
|
|
|
|
12 |
0 |
+1 |
+1 |
y12 |
0 |
0 |
0 |
|
13 |
0 |
0 |
0 |
y13 |
|
|
|
|
14 |
0 |
0 |
0 |
y14 |
|
|
|
|
15 |
0 |
0 |
0 |
y15 |
Анализ плана: см. раздел 6.4.
6.3. Планы для факторов на 2-х и 3-х уровнях
Если априорно известно линейное влияние одного или нескольких факторов на параметр оптимизации, то имеется возможность сократить количество экспериментов за счет использования смешанных планов на 2-х и 3-х уровнях. Эти планы очень эффективны, они не обязательно ортогональны [12].
План эксперимента 2K3M является комбинацией процедур, описанных для планов 2(K-P) и 3(K-P) (см. табл.6.3). Заполнение матрицы планирования начинается с факторов, находящихся на 3-х уровнях, а затем производится дополнение факторами, находящимися на 2-х уровнях.
Таблица 6.3. Примеры планов типа 2131 (слева) и 2231 (справа).
N |
X1 |
X2 |
Y |
1 |
- |
- |
y1 |
2 |
+ |
- |
y2 |
3 |
- |
0 |
y3 |
4 |
+ |
0 |
y4 |
5 |
- |
+ |
y5 |
6 |
+ |
+ |
y6 |
N |
X1 |
X2 |
X3 |
Y |
1 |
- |
- |
- |
y1 |
2 |
- |
+ |
- |
y2 |
3 |
+ |
- |
- |
y3 |
4 |
+ |
+ |
- |
y4 |
5 |
- |
- |
0 |
y5 |
6 |
- |
+ |
0 |
y6 |
7 |
+ |
- |
0 |
y7 |
8 |
+ |
+ |
0 |
y8 |
9 |
- |
- |
+ |
y9 |
10 |
- |
+ |
+ |
y10 |
29

11 |
+ |
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
+ |
|
|
y11 |
||||||||||||||||||||||||||||||
12 |
+ |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
+ |
|
|
y12 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.6.1. Виды поверхностей отклика для планов типа 2131 без взаимодействий (слева) и с взаимодействиями (справа).
Примеры получаемых регрессионных моделей:
y=a0+a1x1+a2x2+a22x22,
y=a0+a1x1+a2x2+a12x1x2+a33x32.
Для нахождения коэффициентов модели используется МНК для нелинейных моделей (см. раздел 6.4), который не требует ортогональности плана.
6.4. Метод наименьших квадратов для нелинейных моделей
Для линейных моделей вида (см. рис.4.1А,В) нахождение коэффициентов осуществляется достаточно по простым формулам (5.1-5.3). Наличие большого числа алгоритмов оптимизации и мощных вычислительных средств дает исследователю еще один, наиболее универсальный, способ нахождения коэффициентов, который заключается в «подгонке» заданной пользователем модели к экспериментальным данным.
Нахождение коэффициентов модели осуществляется с помощью ЭВМ, используется программная реализация какого-либо алгоритма оптимизации. В настоящий момент существует большое количество видов и модификаций оптимизирующих алгоритмов, но разработчики программного обеспечения отдают предпочтения, как правило, градиентным алгоритмам, которые, несмотря на относительно высокую сложность реализации, обладают хорошей скоростью и точностью работы. Тем не менее, каких-либо принципиальных ограничений на применение других алгоритмов оптимизации не существует – главное, чтобы последние эффективно решали поставленную задачу.
Исходными данными для алгоритма являются:
план эксперимента,
предварительно обработанные измерения (удалены грубые и систематические ошибки, оценена воспроизводимость опытов),
желаемый вид модели (обычно со всеми факторами и взаимодействиями).
Задача нахождения коэффициентов модели с помощью алгоритмов оптимизации заключается в подборе таких коэффициентов модели, при которых расхожде-
30