

Расчёт параметров аналоговых регуляторов
Согласно структурной схеме имеется два регулятора: П- и ПИ-регуляторы. Параметры регуляторов определяются по следующим формулам:



Передаточная функция П- и ПИ-регулятора в общем виде:


где k – параметр регулятора или пропорциональный коэффициент ( П-регулятор – это по сути пропорциональное звено).
kрт= 1,217 Трт = 0,9116 с,kрт· Трт= 1,11 с.
Математическое моделирование электропривода компрессорной установки с частотным управлением
Уравнения, описывающие асинхронный двигатель в координатах , выглядят следующим образом:


Преобразовав их можно получить:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
Мэ= 3/2*Lmp(IrIs-IrIs)
Модель системы управления электроприводом насосной установки содержит следующие блоки: задатчик интенсивности, преобразователь частоты, регуляторы скорости и тока статора двигателя, модель компрессорной нагрузки.

Рис.1. Структурная схема системы автоматического управления

Рис.2. Структурная схема асинхронного двигателя в среде Matlab


Время шага -2.5с
Рис. 3 . компрессорная нагрузка в средеMatlab
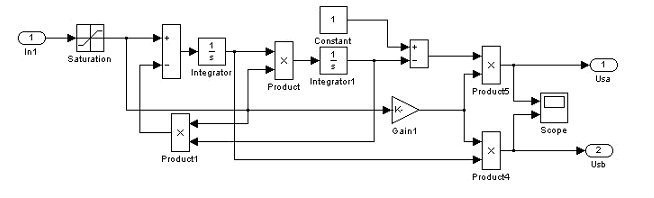
Рис.4.Структурная схема идеализированного преобразователя частоты в среде Matlab
Результаты моделирования
В результате моделирования были получены
следующие графики переходных процессов:
результате моделирования были получены
следующие графики переходных процессов:
Рис.5.Переходные процессы в системе автоматического управления приводом компрессорной установки.
Полученные переходные процессы затухают, что свидетельствует о правильности проведённого расчёта. Определяем показатели качества:
По заданию:
Установившееся отклонение δУСТ = 0%. так как в системе присутствует интегральное звено(ПИ-регулятор тока статора), следовательно, система астатична;
Время регулирования ТРЕГ = 26 с.;
Перерегулирование
 ;
;Показатель колебательности ψ = 1;
Степень затухания
 ;
;
Выводы по результатам моделирования
Как из графиков видно, что предлагаемая САУ обеспечивает необходимое качество переходных процессов. Значения настраиваемых параметров САУ выбраны верно.
Показатели качества разработанной САУ не хуже, чем соответствующие показатели существующей системы.
Программа для контроллера
Согласно заданию, для функциональной реализации алгоритма управления пуском привода на микроконтроллере S7-200 разработана управляющая программа с помощью прикладной программы STEP7-Micro/WinSP1 V3.1. Микроконтроллер, встроенный в систему управления, по программе осуществляет: проверку блокировок, пуск привода с заданной интенсивностью разгона и торможения, останов.
К контроллеру подключена кнопка «ПУСК» (вход I0.0), кнопка «СТОП» (вход I0.1), контакты блокировок (входы I0.2 - I0.5).
При нажатии кнопки ПУСК ячейка памяти М0.0 устанавливается в единичное состояние, при этом запускается таймер Т37. сигнал с таймера появляется через 1 сек. и опрашивает контакты блокировок. Если все условия выполняются, то подается напряжение на преобразователь частоты. Сигнал с таймера Т38 появится через 2 сек. и происходит запуск двигателя.
Пример реализации программы на микроконтроллере представлен на рисунке:

Рис.6. Программа для микроконтроллера