

Первичные изм. преобразователи. Часть 2
.pdfРис. 8.6.2.Кинематическая схема пневмосиловых преобразователей:
1 - пневмопреобразователь; 2 -подвижная система; 3 - передаточный механизм; Q - усилие устройства обратной связи; QC - усилие пружины «корректор нуля»; QT - пропорциональное тяговое усилие
Однако по сравнению со схемой А, Б, В рис.8.6.2 в данной схеме не обеспечиваются перенастройки по входному усилию в тех же пределах как показала конструктивная проработка на макетном образце, этот вариант однорычажной схемы может реализовать силовую компенсацию в
QT max
соотношении не более QT min = 3 ÷ 4.
Перенастройка пределов измерения пневмопреобразователя, выполненного по схеме Д (рис. 8.6.2) осуществляется дискретным изменением величины QOC, т.е. за счёт замены элементов обратной связи (сильфонных узлов) с последующей подрегулировкой при установке его в номинальное положение lOC в пределах ±∆ lOC
QT max l = |
Qmin (lOC ± lOi ) |
(8.6.4) |
где ∆Qmin- |
приращение усилия |
i-го элемента обратной связи, |
|
|
210 |
соответствующего изменению выходного сигнала пневмопреобразователя от
(0,02 до 0,1 МПа) Y0 доYм;
lOC - номинальная величина плеча при подключении i-го элемента обратной связи;
∆ lOi - величина изменения плеча lOC при точной подстройке пневмопреобразователя.
К разработке принимается пневмопреобразователь по функциональной схеме рис.8.6.1, кинематическая схема показана на рис.8.6.2, с использованием в качестве устройства обратной связи стандартных сильфонов, принимая конструктивно сильфоны из дисперсионнотвердеющего коррозионно-стойкого сплава 36НХТЮ (ЭИ-702) .
8.7. Выбор и расчёт основных параметров силового элемента обратной связи
После того, как определён выбор ЧЭ и известны их основные параметры и размеры, а также предельные значения тяговых усилий (QT min и QT max), можно найти целесообразное соотношение плеч рычага по кинематической схеме пневмосилового преобразователя и выбрать соответствующие им размеры элементов обратной связи.
Принимаем длину рычага l в полости высоких давлений конструктивно = 60 мм, используя расчётные тяговые усилия ∆Qmin сильфонов обратной связи
(табл. 8.1).
QT max l = Qmi(lOC ± lOi ) , где
∆ lOi = 0 откуда lOC |
= |
QT max l |
|
|
|
|
|
Q min |
y0 -выходной сигнал max = 0,1 МПа (1кгс/см2); ymin - выходной сигнал «0» = 0,02 МПа (0,2 кгс/см2);
Qmax = FC ( y0 − ymin ) ,
где ∆Qmax - максимальное тяговое усилие сильфона обратной связи
211

|
|
|
|
|
Таблица 8.1 |
||
|
|
|
|
|
|
||
|
Обозначение |
FC |
Жесткость |
Максимальное усилие |
|||
|
∆Q развив. |
|
сильфоном |
||||
№ |
сильфона по |
эффективная |
сильфона |
|
|||
обратной связи |
|||||||
п/п |
ГОСТ |
площадь, |
Goi, |
||||
Qmax = FC ( y0 |
− ymin ) = 0,8FC |
||||||
|
11915-66 |
(см2) |
(кгс/мм) |
||||
|
|
|
|
(кгс) |
|
(Н) |
|
|
|
|
|
|
|
|
|
1 |
34 4 0,08 |
6,3 |
0,40 |
(5,04) |
|
49,0 |
|
|
|
|
|
|
|
|
|
2 |
38 4 0,08 |
8,0 |
0,48 |
(6,4) |
|
62,7 |
|
|
|
|
|
|
|
|
|
3 |
42 4 0,08 |
12,5 |
0,33 |
(10,0) |
|
98,1 |
|
|
|
|
|
|
|
|
|
lOC = |
QT max l |
= |
8, 25* 60 |
= 49, 5 |
|
Q min |
10 |
||||
|
|
|
принимаем lOC = 50 мм
Принимается к проектированию сильфон обратной связи.
Рис.8.7.1. Конструктивное исполнение узла сильфона обратной связи.
212

Вид сверху
Рис 8.7.2. Конструктивное исполнение узла индикатора
рассогласования типа сопло – заслонка:
1-сопло, 2- заслонка, 3- рычаг.
8.8.Выбор индикатора рассогласования
Вкачестве индикатора рассогласования в пневматических приборах широко применяются преобразователи типа сопло-заслонка. Индикатор (рис.8.8.1) состоит из переменного дросселя (сопло и заслонки) и постоянного дросселя, который образует совместно с переменным дросселем междроссельную камеру. В междроссельной камере формируется выходной сигнал ξ = f(λ).
Вся система запитана сжатым воздухом Е0-0,14 ±10% МПа и автоматически поддерживается в этом режиме во время работы.
Зависимость выходного сигнала ζ от перемещения заслонки на λ - характеризуется (с достаточной точностью) формулой:
ξ = |
|
|
E0 |
, |
(8.8.1) |
1 + |
16dc 2 λ2 |
||||
|
dд4 |
|
|
||
|
|
|
|
|
|
213

где |
dc - диаметр сопла; |
|
λ - (ход) перемещение заслонки; |
|
dд - диаметр постоянного дросселя; |
|
E0 - давление питания системы; |
|
ξ - выходной сигнал. |
Диаметр постоянного дросселя dд1, не целесообразно выбирать менее 0,3 мм, так как при этом значительно снижается надёжность работы всего прибора вследствие частичного или полного засорения отверстия дросселя. Применение (dc - диаметра)сопла более 1,2 мм приводит к существенному возрастанию расхода питания, в большинстве современных пневматических приборах применяются сопла и дроссели в пределах dc = 0,6÷1,2 мм и dд
=0,3÷0,5 мм при отношении dc = 2÷4.
dд
На рис.8.8.1 приведены характеристики индикаторов рассогласования типа сопло-заслонка dc = 1 мм и dд = 0,3 мм и dc = 1 мм и dд = 0,5 мм.
Индикаторы рассогласования с эжекторными дросселями отличаются двумя соосно расположенными сопротивлениями с отверстиями dд1 и dд2 (рис. 8.8.1).В междроссельной камере эжектора формируется давление величина которого зависит от положения заслонки относительно торцевой кромки сопла.
Увеличение крутизны статической характеристики (по сравнению с характеристиками индикаторов «сопло-заслонка» обычного типа) объясняется тем, что при открытии переменного дросселя (заслонки) в значительной мере возрастает скорость воздуха, вытекающего из отверстия дросселя (т.е. происходит интенсивный переход потенциальной энергии в кинетическую (при этом статическое давление падает ниже атмосферного).
214

Рис.8.8.1. Статические характеристики индикаторов рассогласования типа
«сопло-заслонка»
Принимается к разработке индикатор рассогласования с «эжекторным» соплом: dд1 - = 0,3 мм; dд2 = 0,5 мм; dс = 1 мм — ( величина рабочего хода λ заслонки 12 мкм).
8.9. Пневмоусилитель
Для передачи выходного сигнала на большие расстояния, снижения запаздываний, улучшения динамических характеристик, ПДД снабжаются усилителями.
215
Благодаря применению усилителей увеличивается крутизна рабочего
участка результирующей характеристики |
y=f(λ) системы индикатор- |
усилитель. |
|
Усиление давления применяют с целью уменьшения рабочего хода λ , при этом улучшается относительная линейность рабочего участка характеристики ξ= f(λ) преобразователя типа «сопло-заслонка» На схеме А рис.8.9.1 показан усилитель, в котором выходной сигнал (давление) ζ от индикатора рассогласования управляет мембраной (2), при совершении ею хода клапанная система перекрывает сопло (1) выхода в атмосферу и одновременно открывается клапан (3), поджатый пружиной (4),чем увеличивается давление y на выходе усилителя.
На схеме Б показан усилитель, в котором установлен постоянный дроссель снижающий расход питания, а также разделены управляющими клапанами (1 и 3) мембраны на 2 и 2а.
При выборе схемы пневмоусилителя необходимо учитывать следующие основные требования:
Рабочее перемещение заслонки индикатора рассогласования не должно превышать величины λ = 3÷5 мкм.
Расход воздуха питания системы «индикатор-усилитель» в установившемся режиме не должен быть превышен 8 л/мин (в соответствии с требованиями ГОСТ 13034-67).
Использование в приборе индикатора рассогласования с эжекторным дросселем и пневматического реле с коэффициентом усиления К = 3 обеспечит возможность получения высоких метрологических характеристик.
216
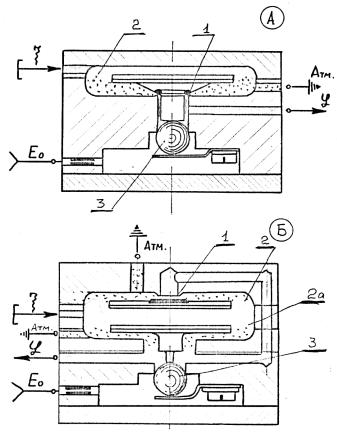
Рис. 8.9.1. Усилитель
8.10. Корректор нуля
Для обеспечения установки начального значения выходного сигнала y0 прибор снабжён «корректором нуля».
Корректор нуля выполнен в виде пружины, позволяющей регулировать усилие натяжения, благодаря чему достигается исходное равновесное положение кинематической системы прибора.
|
QT l = y0 FOC lOC + qnp lnp , |
(8.10.1) |
где: |
qnp - усилие пружины корректора нуля; |
|
|
lnp - плечо, на котором действует qnp. |
|
При QT = 0, уравнение (8/4/6) принимает вид
y0 FOC lOC + qnp lnp = 0
откуда
217

q |
|
= − y |
F |
lOC |
. |
(8.10.2) |
|
|
|||||
|
np |
|
0 OC |
lnp |
|
|
Знак «-» показывает, что усилие пружины может быть, направлено навстречу начальному усилию обратной связи. Величина этого усилия реализуется натяжением (сжатием) пружины при перемещении её свободного конца на величину Xnp.
Принимаем (конструктивно) расположение пружины у крайнего верхнего расположения сильфона, т. е. lnp = 100 мм.
Находим наименьшее значение qnp min ,зная FOC - сильфона 42х4х0;08 (см. таблицу 8.1)
qnp min |
= 0,2 *12,5 − |
50 |
= 1,25 . |
|
|||
|
100 |
|
|
Принимая перемещение свободного конца пружины Xnp= 10 мм, определим ориентировочно жесткость пружины корректора нуля:
CΠΡ = qnp min = 0,125 .
X np
Спр = 0,130 кГс/мм.
Пружины корректора нуля изготовляются из материалов, обладающих высокими упругими свойствами и малым температурным коэффициентом модуля упругости γЕ. К таким материалам относятся дисперсионно твердеющие сплавы марок 41НХТ и 43НХТ с температурным коэффициентом модуля упругости γЕ =3*10-5 1/С0 (т. е. на порядок меньше,
чем |
у |
обычных |
пружинных |
сталей), |
предел |
прочности |
(σпр = 120±140 кгс/мм2. |
|
|
|
|
||
В |
качество корректора нуля принимаем |
пружину с |
жесткостью |
|||
Спр=0,2 кгс/мм. |
|
|
|
|
||
218

Рис.8.10.1. Конструктивное исполнение узла корректора «нуля»: 1.-
пружина 1 , 2- винт корректора, 3- стойка
8.11. Устройство вывода
Под устройством вывода понимается узел, обеспечивающий передачу тягового усилия QТ из полости высоких давлений в атмосферу в виде поворота рычага на угол φ. При этом угловая жесткость упругих элементов вывода в направлении усилия QТ должна быть достаточно малой, но не давать остаточных деформаций в интервале Рст 0÷40 МПа (0÷400 кгс/см2) и при температурах от -50° до +50 ° С и выше.
На рис.8.11.2 представлена схема узла вывода с мембранным уплотнением 3 (широко применяется в конструкциях ППД), которое совместное с двумя тягами 4 — образуют шарнир, с одной степенью свободы. Для снижения осевой нагрузки мембраны от воздействия рабочего давления стремятся уменьшить эффективную площадь мембраны FэфМВ (рис.8.11.1), но при этом увеличивается угловая жесткость. Практикой достигнуты рациональные размеры мембранного вывода с соотношением
219