

Первичные преобразователи. Сокращенный курс
.pdf4.Приведите схемы реостатных датчиков для измерения линейных и угловых перемещений.
5.Объясните методику расчета реостатных преобразователей. Какие материалы используются при конструировании реостатных преобразователей?
6.Приведите примеры применения реостатных датчиков для измерения механических величин. Объясните принцип работы линейного акселерометра.
7.Объясните принцип работы тензометра с петлевым расположением витков и фольгового тензометра.
ГЛАВА 8. ЭЛЕКТРОМАГНИТНЫЕ ПЕРВИЧНЫЕ ПРЕОБРАЗО-
ВАТЕЛИ
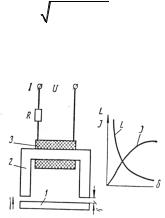
Электродвижущая сила (ЭДС) генерируется вдоль проводника, когда его пересекает переменное магнитное поле. И, наоборот, когда проводник движется через магнитное поле, вдоль него генерируется ЭДС (рис. 8.1) , определяемая из следующего соотношения:
|
|
E = − |
Q(Nф) |
|
(8.1) |
|
|
dt |
|||
|
|
|
|
||
|
d (Nф ) |
|
|
|
|
где |
|
— скорость изменения потокосцепления. |
|
||
|
|
||||
dt
Рис. 8.1. Электромагнитное преобразование
130

Рис. 8.2. Индуктивное преобразование |
Рис. 8.3. Преобразование магнитного |
|
сопротивления, используемое в диф- |
|
ференциальном трансформаторе с |
|
линейно-изменяющимся выходом |
Индуктивное преобразование показано на рис. 8.2, где са-
моиндукция катушки меняется в соответствии с изменением измеряемой величины. Изменение индуктивности может быть осуществлено путем движения ферромагнитного сердечника внутри катушки либо путем внесения внешнего изменяющегося потока в катушку с непо-
движным сердечником [1].
Преобразование магнитного сопротивления показано нарис. 8.3, на котором цепочка сопротивления между двумя или более катушками (или отдельными частями одной или нескольких катушек) изменяется в зависимости от вариаций измеряемой величины. Когда к системе катушек прикладывается переменный ток, тогда изменение измеряемой величины трансформируется в изменение выходного напряжения [2].
8.1. Индуктивные датчики
Индуктивные электромагнитные датчики находят широкое применение для измерения малых и больших перемещений. Основной принцип работы индуктивных датчиков состоит в изменении сопротивления магнитопровода, осуществляемого или изменением величины воздушного зазора магнитной цепи, или магнитной проницаемости железного сердечника, входящего в магнитную цепь. Индуктивные датчики бывают с переменным воздушным зазором,
131

с подвижным железным сердечником, магнитоупругие (или магнитострикционные) и основанные на вихревых токах.
Индуктивность электромагнитной системы, содержащей обмотку и ферромагнитный сердечник с небольшим воздушным зазором, определяется формулой
L = |
w2 |
, |
(8.1.1) |
|
|||
|
Z м |
|
|
где w — число витков; Z м — магнитное сопротивление сердечника и зазора.
Как известно, Z = |
|
|
, где R = |
l |
|
|
||||
(R |
+ R )2 + x2 |
— |
||||||||
μ sж |
||||||||||
м |
ж |
δ |
м |
ж |
|
|||||
|
|
|
|
|||||||
активное магнитное сопротивление сердечника, 1 / Ом• с;l |
и sж |
— |
||||||||
длина и площадь поперечного сечения сердечника в см и см2; |
|
|||||||||
µ — магнитная проницаемость сердечника, |
Гн/м; Rж = |
|
δ |
|
— |
|||||
|
μвsв |
|||||||||
|
|
|
|
|
|
|
||||
магнитное сопротивление воздушного зазора, 1/Ом• с; δ — величина воздушного зазора, см; sв — площадь поперечного сечения участка воздушного зазора, см2; µв — магнитная проницаемость
воздуха; Х |
|
= |
|
Рж |
— |
реактивная составляющая магнитного со- |
|
м |
ωФ2 |
||||||
|
|
|
|
||||
противления, обусловленная вихревыми токами и потерями на ги-
стерезис, 1/Ом• с; |
Рж — потери |
в сердечнике, Вт; ω — угловая |
|||||
частота, рад/с; Ф — |
эффективное значение магнитного потока, Вб. |
||||||
Подставляя выражение Z м в формулу (8.1.1), будем иметь |
|||||||
|
L = |
|
|
w2 |
|
|
(8.1.2) |
|
|
|
|
|
|
||
|
|
|
(R |
+ R )2 |
+ Х 2 |
||
|
|
|
ж |
δ |
м |
||
Эта формула показывает, что индуктивность L электромагнитной системы можно изменять, воздействуя на число витков системы, активное магнитное сопротивление сердечника, величину воздушного зазора магнитопровода и реактивное магнитное сопротивление магнитной цепи. Все эти параметры могут быть положены в основу построения индуктивных датчиков перемещения.
132
8.2 Датчики с переменным воздушным зазором
На рис. 8.2.1. приведены схемы и характеристика индуктивного датчика с переменным воздушным зазором. Обычно индуктивный датчик проектируют с ненасыщенным магнитопроводом, причем воздушный зазор выбирают в пределах 0,1—0,5 мм. При этих условиях можно в выражении (8.1.2) пренебречь значениями Rж и Хм, тогда
L ≈ |
w2 |
= |
w2sвμв |
. |
(8.2.1) |
|
Rδ |
|
δ |
|
|
Чувствительность индуктивного датчика
|
dL |
= - |
w2 s μ |
(8.2.2) |
|
S = dδ |
δ 2 |
||||
|
|
|
в в |
, |
|
т. е. она обратно пропорциональна квадрату воздушного зазора.
Величина тока в обмотке датчика
I = |
|
|
U |
|
× a |
(8.2.3) |
|
|
|
|
|
||
|
|
R2 |
+ |
ω 2 L2 |
|
|
где U — напряжение, В; R — активное сопротивление, Ом; ω — угловая частота переменного тока, рад/с; L — индуктивность, Гн..
Рис. 8.2.1. Схема и характеристика индуктивного датчика: 1 — якорь;
2 — сердечник; 3 — обмотка.
Индуктивные датчики с переменным воздушным зазором имеют высокую чувствительность, так как они реагируют на изменение величины воздушного зазора порядка 0,1—0,5 мк. Этим и объясняется широкое их применение в измерительной технике.
133
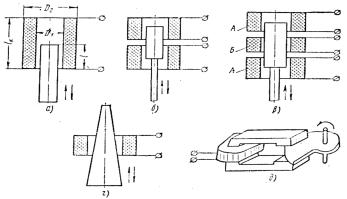
8.3. Датчики с подвижным сердечником
Для измерения больших перемещений, порядка нескольких сантиметров, применяют соленоидные датчики (рис. 8.3.1, а), состоящие из открытого соленоида и подвижного якоря. При вхождении якоря внутрь катушки индуктивность последней изменяется приблизительно пропорционально введенной в катушку массе якоря, т. е.
L = |
w2 |
(D |
2 |
− D )lμ , |
(8.3.1) |
|
lк |
1 |
|
||
|
|
|
|
||
где w lk, D2 − D1 — |
|
число витков, длина и разность диамет- |
|||
ров поперечного сечения катушки, см; l — величина вхождения якоря, см; µ — магнитная проницаемость материала якоря, Гн/м.
Рис. 8.3.1. Типы индуктивных датчиков с подвижным железным сер-
дечником
На (рис. 8.3.1, б) показан дифференциальный индуктивный датчик соленоидного типа. В таких датчиках входное перемещение якоря составляет до 50—60 мм.
На (рис. 8.3.1, в) приведена схема трансформаторного дифференциального датчика, состоящего из трех катушек; двух катушек А, питаемых переменным током, и катушки Б, к которой присоединяется измерительный прибор. При отсутствии вибрации якорь находится в нейтральном положении, и в цепи измерительной катушки тока нет.
134
При смещении якоря в любую сторону и нарушении симметрии в этой цепи появляется ток с частотой питающего напряжения. Если якорь является сейсмической массой, то при ее вибрации относительно катушек в цепи измерительной катушки возникают модулированные колебания, как и в схеме вибродатчика трансформаторного типа. В случае необходимости катушки А и Б можно поменять местами: питание можно подавать в катушку Б, а суммарное напряжение измерять на катушках А.
Для измерения больших перемещений применяется соленоидный датчик, состоящий из относительно короткой катушки и профильного якоря большой длины (рис. 8.3.1, г). В конструкциях этих датчиков можно путем изготовления якоря сложной формы получить линейную зависимость.
На (рис. 8.3.1, д) изображена схема индуктивного датчика с профилированным плоским кулачком, который играет роль якоря и может поворачиваться на угол α = 0÷360°. При этом возможно получение любого вида зависимости L = f (a) .
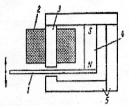
8.4. Индукционные датчики.
На рис. 8.4.1 показана схема индукционного датчика с неподвижной катушкой. Якорь 1, перемещаясь, изменяет величину воздушного зазора и, следовательно, магнитного потока, созданного постоянным магнитом 4 и проходящего через сердечник 3 катушки 2. Благодаря большому числу витков катушки ЭДС, наводимая в ней, достигает значительных величин (до нескольких единиц и даже десятков вольт). В конструкции датчика предусмотрен шунтирующий магнитопровод 5. Это сделано для того, чтобы при перемещении якоря датчика не нужно было преодолевать силы магнитного притяжения. В результате замыкания примерно половины магнитного потока постоянного магнита через шунтирующий магнитопровод якорь одинаково притягивается концами этого магнитопровода и сердечника 3.
|
Рис. 8.4.1. Индукционный датчик с не- |
|
не- |
||
подвижной катушкой |
||
|
|
135
Магнитный поток в зазоре такого датчика |
|
||||||||||
Ф = |
|
|
|
|
Нсlм |
|
, |
(8.4.1) |
|||
2l |
м |
+ ∑ |
|
l |
+ |
δ |
|
|
|||
|
|
|
|
cm |
|
|
|
||||
|
μ |
|
|
μ |
s |
μ s |
|
||||
|
м |
s |
м |
|
|
|
|||||
|
|
|
|
|
cm cm |
|
в в |
|
|||
где Нс — коэрцитивная сила магнита, а/см; lм — длина постоянного магнита, см; µм — магнитная проницаемость постоянного магнита, Гн/м; sм — площадь поперечного сечения постоянного магнита, см2; lст — длина стальных участков в магнитной цепи датчика, см; scm — площадь поперечного сечения этих участков, см2; µcm — магнитная проницаемость стали, Гн/м; δ — длина пути магнитного потока в зазоре, см; µв — магнитная проницаемость воздуха,
равная 1,256*10-8 Гн/м; sв — площадь поперечного сечения зазора, см2.
Если считать, что при малых изменениях величины воздушного зазора, магнитного потока и индукции в магнитопроводе (включая постоянный магнит) значения магнитных проницаемостей материалов различных участков магнитопровода остаются неизменными, а следовательно, остаются неизменными величины их магнитных сопротивлений, то при этом допущении ЭДС, индуцируемая в катушке датчика, может быть определена по формуле
|
dФ |
|
dФ dδ |
|
|
|
|
|
|
|
Нсlм |
|
|
|
|
|
|
1 |
, |
|||||
E = -w |
|
= -w |
|
× |
|
= w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
v |
|
dt |
dδ |
dt |
|
2l |
м |
|
+ ∑ |
|
|
l |
|
|
+ |
δ |
|
2 |
μвsв |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
cm |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
μ |
|
s |
|
|
μ |
|
|
μ s |
|
|
|
|||||||
|
|
|
|
|
|
|
|
м |
м |
|
cm |
s |
|
|
в |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
cm |
|
|
в |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(8.4.2) |
|
где w — |
число витков катушки датчика; |
v — |
скорость изме- |
|||||||||||||||||||||
нения величины воздушного зазора датчика в см/ceк.
Такие датчики применяются в тех случаях, когда не требуется высокой точности измерения, но необходимо, чтобы в катушке датчика индуцировалась э. д. с. большой величины.
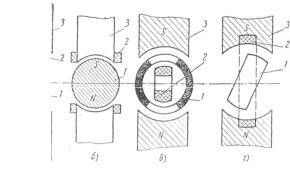
Индукционные датчики вращательного движения служат для измерения угловых скоростей и ускорений.
На (рис. 8.4.2, а) показана схема индукционного датчика вращательного движения с вращающейся катушкой 2, которая механически связана с испытуемым объектом через вал 1 и перемещается относительно магнита 3. Такие датчики представляют собой не-
136
большой генератор и делятся на датчики постоянного тока, имеющие коллектор, и датчики переменного тока, имеющие контактные кольца. ЭДС, наводимая в обмотке этих датчиков, пропорциональна скорости вращения якоря с обмоткой с точностью до 1—3°. Эти датчики обычно работают при скоростях вращения якоря до 5000 — 10 000 об/мин.
При более высоких скоростях использование этих датчиков затруднительно, так как центробежные силы создают в обмотке большие растягивающие усилия. Также затруднительно измерение очень малых скоростей из-за ненадежности работы скользящих контактов при низких напряжениях.
Рис. 8.4.2. Принцип устройства индукционных датчиков вращательного движения:
а — постоянного тока с вращающейся катушкой; б — переменного тока с вращающимся магнитом; в — переменного тока с вращающимся кольцом; г — переменного тока с подвижным яко-
рем.
В этом отношении применение датчиков с вращающимся магнитом 1 и неподвижными катушками 2 (рис. 8.4.2.,б) следует считать более выгодным, так как, придавая полюсным наконечникам специальную форму, можно получить в обмотках катушек э. д. с., изменяющуюся не по синусоидальному закону, а, например, по пилообразному закону. С помощью таких датчиков можно измерять очень большие скорости (до десятков тысяч оборотов в мину-
137
ту), так как вращающийся магнит может быть полностью уравновешен.
В датчике, показанном на (рис. 8.4.2, в), в зазоре между полюсами неподвижного магнита 3 и катушкой 2 вращается кольцо (в датчике, показанном на (рис. 8.4.2, г,) внутри катушки 2, между полюсами постоянного магнита вращается якорь 1), которое связано механически с испытуемым валом. Кольцо или якорь изготовляют из ферромагнитного материала, изменяющего при своем движении магнитное сопротивление, а следовательно, и поток, сцепляющийся с витками катушки, вызванной отставанием по времени за счет активного сопротивления измерительной схемы. При R — 0 этот член пропадает, и решение приводит к упрощенному выражению
dΩ |
= |
i |
. |
(8.4.3) |
|
|
|||
dt |
кC |
|
||
Рассмотренная схема требует наличия конденсатора большой
емкости.
8.5. Магнитные измерительные преобразователи перемещений
Преобразователи этого типа основаны на принципе изменения магнитного сопротивления между двумя или более магнитными катушками, возбуждаемыми переменным током, в зависимости от перемещения тела. Последнее обстоятельство вызывает изменение выходного напряжения преобразователя. Преобразующий элемент выполняется таким образом, чтобы его можно было использовать в различных типах приборов, в которых осуществляется преобразование измеряемой физической величины в перемещение. Таким образом определяется измеряемая величина.
У дифференциального трансформатора с линейно изменяющимся выходным сигналом три катушки намотаны вдоль одной и той же оси, центральная катушка является первичной. При возбуждении первичной катушки переменным током, когда сердечник движется внутрь катушек, изменяется связь между первичной и вторичными катушками. В результате на выходе вторичных обмоток изменяются значение и фаза напряжения.
138
На рис. 8.5.1, а показаны напряжение и фаза на выходе дифференциального трансформатора. Напряжение равно нулю, когда сердечник находится в центральном или нулевом положении. Выходная характеристика прибора является фактически нелинейной, но обычно считается линейной в центральной области перемещения сердечника (имеет нелинейность менее 1 % ) . С помощью дифференциального трансформатора можно измерять перемещения от нескольких миллиметров до метра. Аналогичным образом работает и дифференциальный трансформатор с угловым изменением выходного напряжения. Он позволяет измерять углы в диапазоне
±40°.
К сожалению, дифференциальные трансформаторы основываются на получении выходного напряжения переменного тока и соответствующей фазы этого напряжения. Поэтому они применяются, как правило, вместе с фазочувствительными детекторами (см. рис. 8.5.1,б), у которых на выходе получается напряжение постоянного тока: положительное, когда сердечник находится по одну сторону от нулевого положения, и отрицательное, когда он перемещается в другую сторону. Выходное напряжение равно нулю, если сердечник находится в центральном положении.
Некоторые дифференциальные трансформаторы используются совместно с внутренними генераторами, детекторами, фильтрами и усилителями, которые позволяют применять преобразователи с возбуждающим напряжением постоянного тока. На выходе у них получается выпрямленное напряжение постоянного тока. Такие приборы позволяют пользователям применять их с обычными преобразователями.
У сельсина одиночная первичная обмотка ротора поворачивается вместе с перемещением измеряемого объекта. Три статорные вторичные обмотки, расположенные друг к другу под углом 120°, формируют выходную обмотку.
Переменный ток возбуждает ротор (этот ток называют опорной частотой) и индицирует выходной сигнал на трех вторичных обмотках. Соотношение между выходами соответствует положению ротора.
Обычно сельсинные системы для измерения перемещений имеют в своем составе два идентичных узла: передающий сельсин (так называемый сельсин-датчик) и сельсин-приемник (сельсин-
139