

XBP1
IN OUT
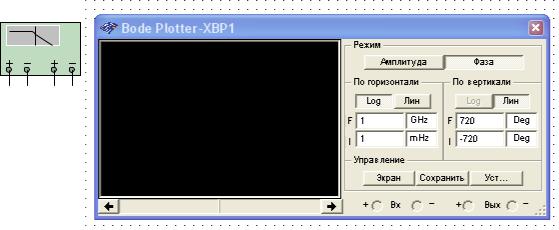
Рис. 10.14. Уменьшенное и увеличенное изображения боде-плоттера
Для измерений отношений амплитуд или фазового сдвига следует подключить положительные вводы Вх и Вых к исследуемым точкам схемы, а отрицательные — заземлить. Для получения АЧХ следует нажать на кнопку Амплитуда, а для получения ФЧХ— накнопку Фаза.
Панель управления По вертикали позволяет задать начальное и конечное значения параметров, откладываемых по вертикальной оси. Клавиши Log и Lin определяют вид шкалы – соответственно логарифмическая и линейная. Панель управления По горизонтали служит для установки диапазона частот. Частота откладываетсяв герцах или в производных величинах (кГц или МГц).
Для получения АЧХ по вертикальной оси откладывают отношения напряжения в линейном масштабе от 0 до 10Е12 либо в логарифмическом масштабе. Для получения ФЧХ по вертикальной оси откладываются градусы в пределах от -720° до +720°. В двух нижних окнах фиксируются координаты той или иной точки АЧХ или ФЧХ.
Помимо указанных выше в программе имеется ряд приборов: измеритель нелинейных искажений, частотомер, частотный анализатор и другие приборы – для анализа и синтеза цифровых и аналого-цифровых устройств.
ГЛАВА 11. Моделирование процессов в электрических цепях
11.1. Переходные процессы в электрических фильтрах
Одним из основных блоков вторичных источников электропитания (ВИП), преобразующих синусоидальное напряжение в постоянное, является электрический фильтр. Схема фильтра, состоящего из элементов L и C, зависит в основном от заданного коэффициента пульсации KП и других технико-

экономических требований. При этом возможно в некотором диапазоне изменять значения L и C, сохраняя при этом необходимую величину KП. Это обстоятельство позволяет выбрать оптимальные значения L и C не только из условия удовлетворения требованию к KП, но и с учетом требований к переходным процессам.
Достаточно просто исследовать переходные процессы при различных вариантах значений L и C с помощью компьютерного моделирования.
Схема для исследования переходных процессов П-образного фильтра, «собранная» на экране монитора, представлена на рис. 11.1, где R1 и R2 – сопротивления источника и нагрузки; С1, С2 и L – емкости и индуктивность фильтра.
|
|
|
|
|
XSC1 |
|
|
|
|
|
|
|
Ext Trig |
|
|
|
|
|
|
+ |
|
|
|
|
|
|
_ |
|
|
|
|
A |
|
B |
|
|
|
+ |
_ |
+ |
_ |
|
|
|
|
|
||
|
|
|
2 |
|
|
|
|
R1 |
L1 |
3 |
|
|
|
XFG1 |
4Ω |
10mH |
R2 |
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
||
|
|
100Ω |
|
|
|
|
|
C1 |
|
C2 |
|
|
|
|
10uF |
|
10uF |
|
|
|
|
0 |
|
|
|
|
|
Рис. 11.1. Схема для исследования переходных процессов |
элек- |
трического фильтра |
|
Для исследования переходных процессов рационально на вход фильтра подавать прямоугольное периодическое напряжение, у которого длительности импульса и паузы должны быть значительно больше времени переходного процесса.
На рис. 11.2 представлены переходные процессы, зафиксированные на экране виртуального осциллографа.
uВЫХ
uВХ
Рис. 11.2. Переходные процессы электрического фильтра
В данном случае на осциллограмме представлены мгновенные значения
напряжений (uВХ , uВЫХ) на входе и выходе фильтра. Так как масштаб по оси напряжений известен, то по осциллограммам можно определить перенапряжения,
возникающие на нагрузке при подключении фильтра к источнику и при отключении от источника.
Этот метод позволяет исследовать переходные процессы в различных электрических схемах.
11.2. Исследование однофазного трансформатора
Для сборки схемы извлечем из библиотек на рабочее поле амперметры, вольтметры, ваттметры, источник напряжения, трансформатор Т1, сопротивление (нагрузку трансформатора) и соединим их в соответствии со схемой, представленной на рис. 11.3
Действующее напряжение на первичной обмотке установим 120 В и частоту – 50 Гц. Величина сопротивления нагрузки может меняться в пределах от 0 в режиме короткого замыкания до бесконечности в режиме холостого хода.

|
U3 |
|
XWM1 |
|
|
U4 |
- |
XWM2 |
|
|
- |
|
|
+ |
|
||||
|
+ |
|
|
9.856 |
V |
|
|
||
|
120.000 |
V |
|
|
|
|
|
V |
I |
|
|
|
V |
I |
U2 |
AC 10M |
|
||
U1 |
AC 10M |
|
|
|
|
||||
|
|
+ |
|
- |
|
|
|
||
+ |
- |
|
|
|
9.857m |
A |
|
|
|
2.162m |
A |
|
|
|
|
|
|
|
|
AC 1e-009 |
AC 1e-009 |
|
T2 |
||
V1 |
||
120 Vrms |
R1 |
|
1kΩ |
||
50 Hz |
|
|
0° |
NLT_PQ_4_10* |
Рис. 11.3. Схема исследования однофазного трансформатора
1. Исследование режима холостого хода (рис 11.4). Установим сопротив-
ление нагрузки (R1 =20 МОм) больше внутреннего сопротивления вольтметра, так чтобы вторичный ток был пренебрежимо мал. При включении питания ток вторичной обмотки равен 0 (1,551 мкА), а ток первичной обмотки равен току холостого хода I0 =2,3 мА. Потери в первичной обмотке при холостом ходе пренебрежимо малы, поэтому потери в трансформаторе Р10 обусловлены потерями в сердечнике:
Р10 = Р = 35,4 мВт.
Эта мощность постоянна и не зависит от нагрузки. Коэффициент трансформации трансформатора
K U10 220 21,3. U20 10,3
2. Номинальный режим. В этом режиме токи и мощности должны соответствовать номинальным значениям, указанным в его паспорте. Номинальная мощность выбранного виртуального трансформатора равна 10 Вт. При этом ток I1 составит 1,15 А при номинальном напряжении U2 = 9,2 В и при активной нагрузке 8 Ом, мощность на входе трансформатора 11,98 Вт, мощность потерь 1,3 Вт, номинальный КПД трансформатора η = 0,88.

Рис. 11.4. Опыт холостого хода трансформатора
Рис. 11.5. Номинальный режим трансформатора
3. Режим короткого замыкания. В этом режиме вторичную обмотку замыкаем накоротко, а к первичной обмотке подводим такое пониженное напряжение, чтобы ток первичной обмотки был равен номинальному значению (I1= 1,15 А).
Не вызовет затруднений исследовать и другие режимы трансформатора: нагрузочную характеристику при различных видах нагрузки; рабочие характе-
ристики [Р1= F(I2), η = F(I2), cosφ1 = F(I2)].
11.3. Исследование полупроводниковых выпрямителей

Полупроводниковые диоды широко используются в промышленности для преобразования переменного напряжения в выпрямленное (постоянное). В зависимости от технических и экономических требований применяют различные схемы выпрямления.
На рис. 11.6 представлена схема однофазного однополупериодного выпрямителя с осциллографом. На основании измеренных (при помощи осциллографа) амплитуды Um первой гармоники и среднего значения выпрямленного напряжения Ud можно определить основной показатель выпрямителя — коэффициент пульсации:
KП Um  Ud .
Ud .
Среднее значение выпрямленного напряжения Ud зависит от схемы выпрямления:
-для однофазной однополупериодной Ud =  2U
2U  0,45U ;
0,45U ;
-для однофазной мостовой Ud = 2  2U
2U  0,9U ;
0,9U ;
-для трехфазной однополупериодной Ud = 2,6 2U
2U  1,17U ;
1,17U ;
-для трехфазной мостовой Ud = 5,19  2U
2U  2,32U .
2,32U .
Рис. 11.6. Схема однофазного однополупериодного выпрямителя
На рис. 11.7 представлена осциллограмма напряжения на выходе выпрямителя. Как видно, теоретическое значение напряжения Ud = 16,1 В и экспериментальное Ud = 15,9 В практически совпадает. Некоторое уменьшение экспериментального значения напряжения Ud обусловлено падением напряжения на диоде. Коэффициент пульсации для этой схемы равен
KП Um  Ud 36
Ud 36 2 /(2 15,9) 1,6 .
2 /(2 15,9) 1,6 .

Рис.11.7. Кривая напряжения на выходе однофазного однополупериодного выпрямителя
Для экспериментального определения амплитуды первой гармоники можно провести анализ Фурье в Mulnisim (рис. 11.8).
Рис.11.8. Анализ Фурье
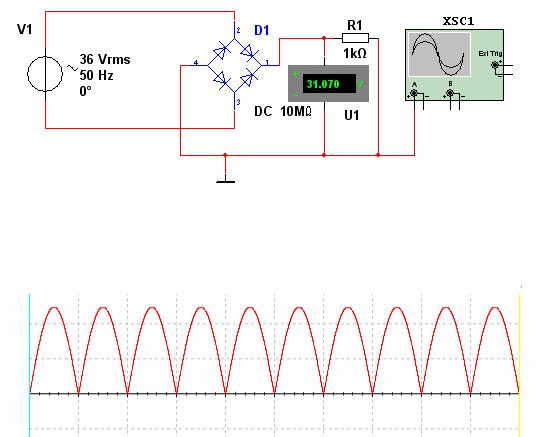
На рис. 11.9 представлена схема однофазного двухполупериодного (мостового) выпрямителя с осциллографом. Среднее экспериментальное значение Ud = 31,07 В, а коэффициент пульсации KП 0,67 . Коэффициент пульсации для этой схемы в 2,34 меньше, чем в схеме однополупериодного выпрямителя. Следует отметить, что, чем меньше KП , тем совершеннее выпрямитель.
Рис. 11.9. Схема однофазного мостового выпрямителя
На рис 11.10 показана кривая напряжения на выходе однофазного мостового выпрямителя
Рис 11.10. Кривая напряжения на выходе мостового выпрямителя
На рис. 11.11 представлена схема трехфазного однополупериодного выпрямителя с осциллографом. Среднее экспериментальное значение Ud = 41,35 В, а коэффициент пульсации KП 0,25. Коэффициент пульсации для этой схе-
мы в 6,28 раза меньше, чем в схеме однополупериодного выпрямителя.
На рис. 11.12 представлена кривая напряжения на выходе трехфазного однополупериодного выпрямителя.
На рис. 11.13 представлена схема трехфазного двухполупериодного (мостового) выпрямителя с осциллографом. Среднее экспериментальное значение Ud = 82,66 В, а коэффициент пульсации KП 0,05. Коэффициент пульсации
для этой схемы в 31,4 раза меньше, чем в схеме однополупериодного выпрямителя.
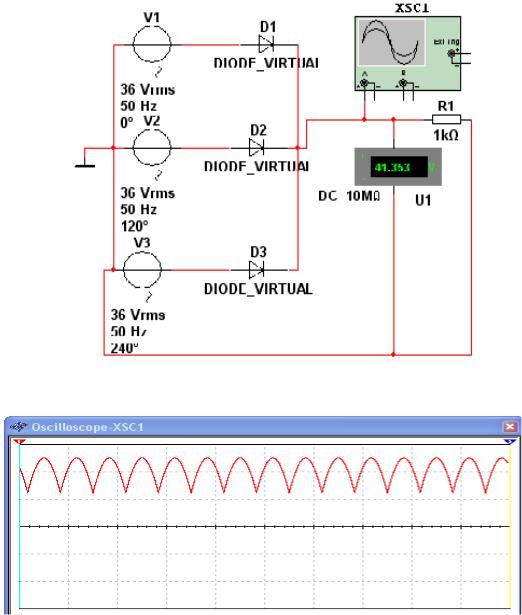
Рис. 11.11. Схема трехфазного однополупериодного выпрямителя
Рис. 11.12. Кривая напряжения на выходе трехфазного однополупериодного выпрямителя
Среднее экспериментальное значение Ud = 82,66 В, а коэффициент пульсации KП 0,05. Коэффициент пульсации для этой схемы в 31,4 раза меньше, чем в схеме однополупериодного выпрямителя.

Рис. 11.13. Схема трехфазного двухполупериодного выпрямителя
На рис. 11.14,а представлены осциллограммы фазных напряжений; на рис. 11.14,б – осциллограмма напряжения на выходе трехфазного мостового
выпрямителя. Указанные четыре кривые напряжений могут быть получены од- |
||
новременно с помощью виртуального четырехканального осциллографа. |
||
uА |
uВ |
uС |
а) |
|
|
ud
б)
Рис. 11.14.Осциллограммы фазных (uА, uВ, uС) и выпрямленного (ud) |
на- |
пряжений |
|
11.4. Модели для решения дифференциальных уравнений

Для решения уравнения производят замену переменной х на время t, т. е.
х = t /τ. Тогда первая и вторая производные y dy dx |
и y d 2 y dx 2 равны |
|||||||
y |
1 |
dy |
|
dy |
и |
y 2 |
d 2 y |
|
|
|
|
|
2 . |
||||
|
|
dt |
dt |
|||||
|
x (t) dt |
|
|
|
|
|||
Путем таких преобразований дифференциальное уравнение приводится к виду, которое может быть реализовано на основе схем интегрирования:
2 |
d 2 y |
|
+ c dy c |
|
y f (t ) , |
||||||||||
dt2 |
|
||||||||||||||
|
|
1 |
dt |
|
|
|
0 |
|
|
|
|||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
d 2 y |
|
+ c dy |
|
1 c |
|
y f (t ) . |
||||||||
dt2 |
|
|
|||||||||||||
|
|
|
1 dt |
|
|
|
|
|
|
0 |
|
||||
Интегрируя левую и правую части уравнения, получим |
|||||||||||||||
dy + |
c y 1 |
|
c |
0 |
y f (t ) dt . |
||||||||||
dt |
1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
Выражение, стоящее в правой части уравнения, реализуется с помощью интегратора. Обозначим его выходной сигнал переменной z, тогда
z1 c0 y f (t ) dt .
) dt .
Сиспользованием переменной z уравнение преобразуется к виду
dy |
+ c y z или |
|
dy |
1 z c y . |
||
dt |
1 |
|
|
dt |
|
1 |
|
|
|
|
|||
Проинтегрировав обе части уравнения, получим |
|
|||||
|
y |
1 |
|
z c y . |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Правая часть этого уравнения так же, как и в предыдущем случае, реализуется с помощью интегратора. Его выходной сигнал соответствует функции – у. Сигнал z поступает с выхода предыдущего интегратора, а сигнал – c1 y ―
через обратную связь с собственного выхода.
Таким образом, для реализации дифференциального уравнения второго порядка требуются два интегратора и один инвертирующий усилитель. Инвертирующий усилитель нужен для изменения знака сигнала со второго интегратора, формирующего – у. Выходной сигнал с этого усилителя с коэффициентом
c0 подается на вход первого интегратора |
(рис. 11.15). |