

Инд-зад-ЭП
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ЮЖНО–РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (НОВОЧЕРКАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ)
——————————————————–––––––––––———
О.А.Кравченко
ВАРИАНТЫ ИНДИВИДУАЛЬНЫХ ДОМАШНИХ ЗАДАНИЙ
по дисциплине "Электрический привод"
~
s |
М |
|
µ
НОВОЧЕРКАССК 2002
2
УДК 62–83:681.5
Рецензент |
канд. техн. наук, доцент В.А.Черепов |
Кравченко О.А.
Варианты индивидуальных домашних заданий по дисциплине "Электрический привод" /Юж.-Рос. гос. техн. ун-т.– Новочеркасск: ЮРГТУ, 2002.– 14 с.
Приведены варианты исходных данных для индивидуального домашнего задания, кинематические схемы механизмов, характеристики и параметры двигателей.
Предназначены для студентов электротехнических специальностей направления "Электротехника, электромеханика и электротехнологии".
©Южно-Российский государственный технический университет, 2002
©Кравченко О.А., 2002
3
1.СОДЕРЖАНИЕ ИНДИВИДУАЛЬНОГО ДОМАШНЕГО ЗАДАНИЯ
ИЕГО ОФОРМЛЕНИЕ
При выполнении домашнего задания должны быть рассмотрены и решены следующие вопросы:
1)по заданной кинематической схеме составить расчетную схему механической части электропривода и свести её к одномассовой модели электропривода. Привести к валу двигателя значение нагрузки, приложенной к объекту управления;
2)для заданного электродвигателя (постоянного или переменного тока), числа ступеней пуска n, статического момента M C , характера пуска (форсирован-
ного или нормального) рассчитать и построить естественную и искусственные пусковые механические характеристики, а также значения пусковых сопротивлений, включаемых в цепь якоря или ротора для получения необходимых искусственных характеристик;
3)определить время разгона электропривода на каждой ступени пуска и общее время разгона до установившейся скорости;
4)рассчитать скорость вращения (перемещения) объекта при работе двигателя на естественной механической характеристике при заданной статической нагрузке.
Номер задания, состоящий из четырех цифр и одной буквы, выдается преподавателем индивидуально каждому студенту:
первая цифра (1–5) |
– номер кинематической схемы электропривода (рис. 1–5); |
вторая цифра (0–9) |
– параметры соответствующей кинематической схемы |
|
электропривода (табл. 1–5); |
две последние цифры (01–60) – характеристики двигателей (табл. 6–8); |
|
буква (Н или Ф) |
– характер пуска (нормальный или форсированный). |
Представленное к защите индивидуальное домашнее задание оформляется в соответствии с требованиями ГОСТ на 6–10 листах формата А4 или в 12–18- листовой тетрадке. Все расчеты следует выполнять в системе единиц СИ. При выполнении домашнего задания рекомендуется пользоваться литературой [1–4].
4
2. КИНЕМАТИЧЕСКИЕ СХЕМЫ ЭЛЕКТРОПРИВОДОВ
2.1. Варианты заданий 10ХХХ–19ХХХ
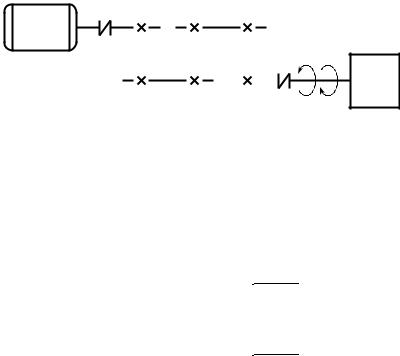
Схема механической части электропривода, приведенная на рис. 1, состоит: из двигателя с моментом инерции J Д , трехступенчатого зубчатого редуктора с
передаточными отношениями ступеней i1 , i2 , i3 и вращающегося со скоростью Ω объекта управления, к которому приложен статический момент M C . Передаточ-
ные числа ступеней редуктора и значение статического момента приведены в табл. 1 в абсолютных единицах, а моменты инерции отдельных звеньев кинематической цепи заданы в долях от момента инерции двигателя.
J Д |
|
J 1 |
|
J 4 |
|
|
J 5 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
i1 |
|
i2 |
|
|
i3 |
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
J 2 |
|
J 3 |
|
|
J 6 |
|
|
|
|
|
|||
|
|
|
|
|
Ω M C
J М
Рис. 1. Механическая часть электропривода с трехступенчатым редуктором
Таблица 1
Параметры механической части электропривода с трехступенчатым редуктором
Вари- |
i |
|
i |
|
i |
|
M C , |
J 1 , |
J 2 , |
J 3 , |
J 4 , |
J 5 , |
J 6 , |
J M , |
ступенейЧисло |
|
ант |
1 |
2 |
3 |
Н м |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
пуска |
||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
n |
|
0 |
1,25 |
3,55 |
4,0 |
2500 |
0,01 |
0,1 |
0,3 |
0,3 |
0,7 |
10 |
4 |
|||||
1 |
1,6 |
2,8 |
5,0 |
3000 |
0,02 |
0,3 |
0,1 |
0,4 |
0,4 |
0,6 |
8 |
3 |
||||
2 |
2,0 |
2,24 |
2,5 |
1500 |
0,03 |
0,2 |
0,2 |
0,6 |
0,4 |
0,8 |
15 |
3 |
||||
3 |
2,5 |
1,8 |
1,25 |
500 |
0,04 |
0,5 |
0,1 |
0,5 |
0,5 |
0,9 |
30 |
2 |
||||
4 |
3,15 |
1,4 |
1,6 |
1000 |
0,05 |
0,4 |
0,4 |
0,7 |
0,2 |
0,7 |
18 |
4 |
||||
5 |
4,0 |
1,12 |
2,8 |
2000 |
0,06 |
0,5 |
0,2 |
0,8 |
0,5 |
0,8 |
5 |
4 |
||||
6 |
1,6 |
2,8 |
2,24 |
1200 |
0,07 |
0,6 |
0,3 |
0,9 |
0,1 |
0,6 |
20 |
2 |
||||
7 |
6,3 |
2,0 |
1,25 |
2300 |
0,08 |
0,2 |
0,4 |
0,8 |
0,3 |
0,7 |
25 |
4 |
||||
8 |
2,0 |
3,55 |
2,8 |
2300 |
0,09 |
0,6 |
0,5 |
0,7 |
0,2 |
0,5 |
6 |
3 |
||||
9 |
1,25 |
2,8 |
1,25 |
400 |
0,10 |
0,7 |
0,2 |
0,6 |
0,5 |
0,9 |
7 |
2 |
||||
5
2.2. Варианты заданий 20ХХХ–29ХХХ
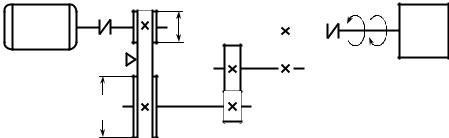
Схема механической части электропривода, приведенная на рис. 2, состоит: из двигателя с моментом инерции J Д , клиноременной передачи с диаметрами
шкивов D1 и D2 , двухступенчатого зубчатого редуктора с передаточными отношениями ступеней i1 , i2 , и вращающегося со скоростью Ω объекта управления, к которому приложен статический момент M C . Диаметры шкивов, передаточные
числа ступеней редуктора и значение статического момента приведены в табл. 2 в абсолютных единицах, а моменты инерции отдельных звеньев кинематической цепи заданы в долях от момента инерции двигателя.
|
|
J 1 |
J Д |
|
D2 |
|
D1 |
J 2 |
|
|
J 4 |
|
|
J 6 |
|
|
||
|
|
|
|
|
|
i2 |
|
|
|
||
i1 |
|
|
J 5 |
|
|
||
J 3 |
|
|
|
Ω M C
J М
Рис. 2. Механическая часть электропривода с клиноременной передачей и двухступенчатым редуктором
Таблица 2
Параметры механической части электропривода с клиноременной передачей и двухступенчатым редуктором
Вари- |
D1 , |
D2 , |
i1 |
i2 |
M C , |
J 1 , |
J 2 , |
J 3 , |
J 4 , |
J 5 , |
J 6 , |
J M , |
ступенейЧисло |
ант |
мм |
мм |
Н м |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
пуска |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
0 |
50 |
63 |
10,0 |
1,25 |
2700 |
0,01 |
0,03 |
0,1 |
0,5 |
0,10 |
0,5 |
3 |
4 |
1 |
56 |
140 |
2,5 |
3,15 |
3000 |
0,05 |
0,10 |
0,2 |
0,6 |
0,20 |
0,4 |
5 |
4 |
2 |
63 |
160 |
1,25 |
2,5 |
800 |
0,08 |
0,20 |
0,5 |
0,9 |
0,70 |
1,0 |
20 |
2 |
3 |
71 |
180 |
1,6 |
2,5 |
1600 |
0,10 |
0,25 |
0,3 |
0,6 |
0,40 |
0,8 |
7 |
4 |
4 |
80 |
140 |
2,5 |
3,55 |
2000 |
0,20 |
0,50 |
0,4 |
0,8 |
0,30 |
0,7 |
10 |
3 |
5 |
90 |
125 |
3,15 |
1,25 |
700 |
0,03 |
0,07 |
0,3 |
0,7 |
0,20 |
0,6 |
6 |
3 |
6 |
100 |
250 |
2,5 |
2,0 |
2000 |
0,04 |
0,10 |
0,2 |
0,5 |
0,05 |
0,1 |
2 |
4 |
7 |
112 |
280 |
2,0 |
1,25 |
800 |
0,05 |
0,20 |
0,1 |
0,4 |
0,10 |
0,2 |
3 |
3 |
8 |
125 |
250 |
1,6 |
5,0 |
2500 |
0,01 |
0,03 |
0,4 |
0,8 |
0,30 |
0,9 |
9 |
4 |
9 |
140 |
280 |
1,25 |
3,15 |
1000 |
0,03 |
0,08 |
0,5 |
1,0 |
0,70 |
1,0 |
15 |
3 |

6
2.3. Варианты заданий 30ХХХ–39ХХХ
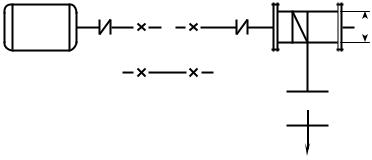
Схема механической части электропривода, приведенная на рис. 3, состоит: из двигателя с моментом инерции J Д ; одноступенчатого зубчатого редуктора с
передаточным отношением i; передачи "винт – гайка" с шагом винта τ и моментом инерции J B , преобразующей вращательное движение в поступательное; объ-
екта массой m, перемещающегося со скоростью V. Передаточное число редуктора, шаг винта и масса объекта приведены в табл. 3 в абсолютных единицах, а моменты инерции отдельных звеньев кинематической цепи заданы в долях от момента инерции двигателя.
J Д
J 1 |
|
|
i |
|
|
J 2 |
||
|
|
|
|
|||||
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J B |
V |
m |
FT = m g
Рис. 3. Механическая часть электропривода с передачей "винт – гайка" и одноступенчатым редуктором
Таблица 3
Параметры механической части электропривода с передачей "винт – гайка" и одноступенчатым редуктором
Вари- |
|
|
|
|
|
|
Число |
τ, мм |
i |
m, кг |
J 1 , о.е. |
J 2 , о.е. |
J B , о.е. |
ступеней |
|
ант |
|
|
|
|
|
|
пуска |
|
|
|
|
|
|
|
n |
0 |
10 |
1,0 |
6500 |
0,01 |
0,1 |
0,5 |
2 |
1 |
15 |
1,25 |
8000 |
0,02 |
0,3 |
0,8 |
4 |
2 |
20 |
1,8 |
8500 |
0,03 |
0,3 |
0,7 |
3 |
3 |
25 |
2,5 |
10000 |
0,04 |
0,2 |
0,9 |
4 |
4 |
10 |
1,6 |
12000 |
0,05 |
0,1 |
1,2 |
3 |
5 |
15 |
1,25 |
8000 |
0,06 |
0,3 |
0,9 |
4 |
6 |
20 |
1,4 |
7000 |
0,07 |
0,4 |
0,6 |
4 |
7 |
10 |
1,25 |
9000 |
0,08 |
0,2 |
0,9 |
2 |
8 |
25 |
2,5 |
10000 |
0,09 |
0,4 |
0,9 |
4 |
9 |
20 |
2,8 |
14000 |
0,10 |
0,5 |
0,8 |
4 |
7
2.4. Варианты заданий 40ХХХ–49ХХХ
Схема механической части электропривода, приведенная на рис. 4, состоит: из двигателя с моментом инерции J Д ; двухступенчатого редуктора с передаточ-
ными отношениями ступеней i1 , i2 ; барабана диаметром D, на который наматыва-
ется стальной канат с закрепленным на нем грузом массой m. Груз, перемещающийся со скоростью V, создает статическую нагрузку, обусловленную его силой тяжести FT . Передаточные числа ступеней редуктора, диаметр барабана и масса
груза приведены в табл. 4 в абсолютных единицах, а моменты инерции отдельных звеньев кинематической цепи заданы в долях от момента инерции двигателя. При расчетах массой каната пренебречь.
J Д |
|
J 1 |
|
J 3 |
|
||||
|
i1 |
|
i2 |
|
|
|
|
||
|
|
|||
|
|
|
||
|
|
J 2 |
|
J 4 |
|
|
|
||
|
|
|
J Б |
D |
 V
V 
 m
m
FT = m g
Рис. 4. Механическая часть электропривода грузоподъемного устройства
Таблица 4 Параметры механической части электропривода грузоподъемного устройства
Вари- |
i1 |
i2 |
D, |
m, |
J 1 , |
J 2 , |
J 3 , |
J 4 , |
J Б , |
ступенейЧисло |
ант |
м |
кг |
о.е. |
о.е. |
о.е. |
о.е. |
о.е. |
пуска |
||
|
|
|
|
|
|
|
|
|
|
n |
0 |
1,25 |
2,5 |
0,70 |
1000 |
0,01 |
0,1 |
0,05 |
0,2 |
0,5 |
3 |
1 |
1,8 |
2,8 |
0,80 |
1700 |
0,02 |
0,1 |
0,04 |
0,6 |
0,8 |
2 |
2 |
2,0 |
2,8 |
0,75 |
3000 |
0,03 |
0,3 |
0,06 |
0,5 |
1,0 |
3 |
3 |
1,6 |
2,0 |
0,50 |
1900 |
0,04 |
0,4 |
0,07 |
0,7 |
0,7 |
3 |
4 |
3,15 |
1,8 |
0,70 |
3500 |
0,05 |
0,2 |
0,05 |
0,4 |
0,9 |
4 |
5 |
4,0 |
1,4 |
0,80 |
2500 |
0,02 |
0,1 |
0,08 |
0,5 |
1,0 |
3 |
6 |
5,0 |
1,12 |
0,40 |
7000 |
0,03 |
0,3 |
0,09 |
0,8 |
0,8 |
2 |
7 |
2,24 |
1,25 |
0,40 |
1600 |
0,01 |
0,2 |
0,06 |
0,9 |
1,1 |
2 |
8 |
2,5 |
1,6 |
0,50 |
2200 |
0,04 |
0,4 |
0,05 |
0,7 |
0,9 |
2 |
9 |
1,6 |
2,8 |
0,60 |
2500 |
0,05 |
0,5 |
0,07 |
0,6 |
1,2 |
3 |

8
2.5. Варианты заданий 50ХХХ–59ХХХ
Схема механической части электропривода, приведенная на рис. 5, состоит: из двигателя с моментом инерции J Д , двухступенчатого редуктора с передаточ-
ными отношениями ступеней i1 , i2 , и реечной передачи, преобразующей враща-
тельные движения шестерни радиусом R в поступательные перемещения объекта массой m, к которому приложено статическое усилие FC . Передаточные числа
ступеней редуктора, радиус шестерни, приводящей объект в движение, и масса объекта приведены в табл. 5 в абсолютных единицах, а моменты инерции отдельных звеньев кинематической цепи заданы в долях от момента инерции двигателя. При расчетах массой реечной передачи пренебречь.
|
FC |
|
m |
V |
|
R |
J 3 |
|
J 1 |
||
i2 |
||
J Д |
J 2 |
|
i1 |
|
Рис. 5. Механическая часть электропривода с двухступенчатым редуктором и реечной передачей
Таблица 5
Параметры механической части электропривода с двухступенчатым редуктором и реечной передачей
Вари- |
|
|
|
|
|
|
|
|
Число |
i1 |
i2 |
R, м |
m, кг |
FC , Н |
J 1 , о.е. |
J 2 , о.е. |
J 3 , о.е. |
ступеней |
|
ант |
|
|
|
|
|
|
|
|
пуска |
|
|
|
|
|
|
|
|
|
n |
0 |
1,0 |
1,6 |
0,20 |
1000 |
1100 |
0,01 |
0,01 |
0,1 |
3 |
1 |
1,25 |
1,12 |
0,25 |
700 |
800 |
0,02 |
0,03 |
0,2 |
3 |
2 |
1,6 |
1,25 |
0,30 |
1300 |
900 |
0,04 |
0,05 |
0,3 |
3 |
3 |
1,12 |
1,4 |
0,50 |
300 |
400 |
0,03 |
0,04 |
0,2 |
2 |
4 |
1,4 |
1,12 |
0,35 |
400 |
600 |
0,05 |
0,05 |
0,4 |
3 |
5 |
1,8 |
1,25 |
0,40 |
600 |
650 |
0,02 |
0,04 |
0,5 |
2 |
6 |
2,0 |
1,25 |
0,45 |
500 |
800 |
0,03 |
0,06 |
0,2 |
4 |
7 |
2,24 |
1,12 |
0,25 |
1700 |
1300 |
0,04 |
0,09 |
0,3 |
2 |
8 |
2,5 |
1,25 |
0,20 |
1200 |
2300 |
0,01 |
0,03 |
0,1 |
4 |
9 |
2,8 |
1,0 |
0,30 |
1100 |
1300 |
0,02 |
0,05 |
0,5 |
3 |
9
3. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ ДВИГАТЕЛЕЙ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА
3.1. Двигатели постоянного тока серии 2П
Машины постоянного тока серии 2П [5] предназначены для работы в широкорегулируемых электроприводах. Условия эксплуатации машин: высота над уровнем моря до 1000 м; температура окружающего воздуха от 5 до 40 оС; относительная влажность воздуха до 80 % при температуре 25 оС и при более низких температурах без конденсации влаги; окружающая среда – невзрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию.
Структура условного обозначения машин постоянного тока серии 2П:
2П Х Х Х Х Х
 Климатическое исполнение и категория размещения по ГОСТ 15150-69.
Климатическое исполнение и категория размещения по ГОСТ 15150-69.
Буква Г при наличии встроенного тахогенератора (в обозначении двигателя без тахогенератора опускается).
Условное обозначение длины сердечника якоря: М – средняя, L – большая.
Высота оси вращения, мм.
Исполнение по способу защиты и вентиляции:
Н – защищенное с самовентиляцией; Ф – защищенное с независимой вентиляцией; Б – закрытое с естественным охлаждением; О – закрытое с внешним обдувом.
Название серии – вторая серия машин постоянного тока.
Двигатели изготавливаются с независимым возбуждением. Напряжение возбуждения 110 или 220 В независимо от номинального напряжения якоря.
Режим работы двигателей – продолжительный S1. Превышение температуры обмоток при установившемся тепловом состоянии двигателей типов 2ПН и 2ПФ соответствует классу В, типов 2ПБ и 2ПО – классу F.
Допустимые кратковременные перегрузки по току при номинальном потоке
возбуждения: |
|
|
для двигателей типов 2ПН, 2ПФ, 2ПО, 2ПБ |
– 2 I НОМ |
в течение 60 с; |
для двигателей типов 2ПН, 2ПФ, 2ПО |
– 3 I НОМ |
в течение 10 с; |
для двигателей типа 2ПБ |
– 4 I НОМ |
в течение 10 с. |
Двигатели допускают длительную работу при номинальном напряжении возбуждения и с пониженной частотой вращения до 1 об/мин при токах якоря, не превышающих I НОМ для двигателей типа 2ПФ, (0,9 −1,0)I НОМ для двигателей типа
2ПБ, (0,75 −0,85)I НОМ для двигателей типа 2ПО.
10
Серия двигателей 2П охватывает диапазон напряжений от 110 до 440 В и частот вращения от 500 до 3000 об/мин. В табл. 6 приведены следующие техниче-
ские данные некоторых двигателей серии 2П: PH |
– номинальная мощность; nH – |
||||||||||||||||||
номинальная частота вращения; U H – номинальное напряжение; ηH – КПД при |
|||||||||||||||||||
номинальной нагрузке; RЯ , RДП |
– сопротивления обмоток якоря и дополнитель- |
||||||||||||||||||
ных полюсов при температуре 15 оС; J Д – момент инерции якоря. |
|
|
|
|
|||||||||||||||
|
Технические данные двигателей серии 2П |
|
|
|
|
Таблица 6 |
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P , |
|
n |
H |
, |
U |
H |
, |
η |
H |
, |
R |
Я |
, |
R |
ДП |
, |
J Д , |
Вариант |
Тип |
H |
|
|
|
|
|
|
|
|
|
|
|
кг м2 |
|||||
кВт |
|
об/мин |
В |
|
% |
|
Ом |
Ом |
|
||||||||||
|
|
|
|
|
|
||||||||||||||
01 |
|
11,0 |
|
600 |
220 |
79,5 |
0,2020 |
0,0678 |
0,525 |
||||||||||
02 |
2ПН225М УХЛ4 |
15,0 |
|
750 |
220 |
80,5 |
0,1460 |
0,0637 |
0,525 |
||||||||||
03 |
22,0 |
|
1000 |
220 |
82,0 |
0,0860 |
0,0429 |
0,525 |
|||||||||||
04 |
|
37,0 |
|
1500 |
220 |
86,5 |
0,1460 |
0,0637 |
0,525 |
||||||||||
05 |
|
37,0 |
|
1500 |
440 |
86,5 |
0,0860 |
0,0429 |
0,525 |
||||||||||
06 |
|
15,0 |
|
600 |
220 |
79,0 |
0,1600 |
0,0742 |
0,60 |
||||||||||
07 |
|
18,5 |
|
750 |
440 |
83,0 |
0,4730 |
0,2080 |
0,60 |
||||||||||
08 |
2ПН225L УХЛ4 |
18,5 |
|
750 |
220 |
83,0 |
0,0950 |
0,0500 |
0,60 |
||||||||||
09 |
30,0 |
|
1060 |
220 |
84,5 |
0,0490 |
0,0197 |
0,60 |
|||||||||||
|
|
||||||||||||||||||
10 |
|
30,0 |
|
1060 |
440 |
84,5 |
0,1960 |
0,0700 |
0,60 |
||||||||||
11 |
|
45,0 |
|
1500 |
220 |
87,5 |
0,2370 |
0,0125 |
0,60 |
||||||||||
12 |
|
10,0 |
|
500 |
220 |
74,5 |
0,3500 |
0,1010 |
0,46 |
||||||||||
13 |
|
15,0 |
|
600 |
220 |
79,5 |
0,1780 |
0,0678 |
0,46 |
||||||||||
14 |
2ПФ225М УХЛ4 |
18,5 |
|
750 |
220 |
81,0 |
0,1460 |
0,0637 |
0,46 |
||||||||||
15 |
22,0 |
|
1000 |
340 |
82,5 |
0,1780 |
0,0670 |
0,46 |
|||||||||||
16 |
|
22,0 |
|
1000 |
440 |
82,5 |
0,3530 |
0,1110 |
0,46 |
||||||||||
17 |
|
37,0 |
|
1500 |
220 |
87,0 |
0,0365 |
0,0159 |
0,46 |
||||||||||
18 |
|
37,0 |
|
1500 |
340 |
87,0 |
0,0865 |
0,0430 |
0,46 |
||||||||||
19 |
|
15,0 |
|
500 |
220 |
77,5 |
0,1960 |
0,0790 |
0,57 |
||||||||||
20 |
2ПФ225L УХЛ4 |
18,5 |
|
750 |
440 |
83,0 |
0,4730 |
0,2080 |
0,57 |
||||||||||
21 |
22,0 |
|
750 |
220 |
83,2 |
0,0950 |
0,0500 |
0,57 |
|||||||||||
|
|
||||||||||||||||||
22 |
|
30,0 |
|
1060 |
440 |
85,0 |
0,1960 |
0,0800 |
0,57 |
||||||||||
23 |
|
22,0 |
|
750 |
220 |
81,0 |
0,0740 |
0,0390 |
1,05 |
||||||||||
24 |
2ПН250М УХЛ4 |
37,0 |
|
1060 |
220 |
85,0 |
0,0350 |
0,0190 |
1,05 |
||||||||||
25 |
50,0 |
|
1500 |
440 |
87,0 |
0,1100 |
0,0540 |
1,05 |
|||||||||||
|
|
||||||||||||||||||
26 |
|
55,0 |
|
1500 |
220 |
87,0 |
0,0185 |
0,0038 |
1,05 |
||||||||||
27 |
|
26,5 |
|
600 |
440 |
81,5 |
0,3800 |
0,1950 |
1,28 |
||||||||||
28 |
2ПФ250L УХЛ4 |
30,0 |
|
750 |
220 |
84,3 |
0,0500 |
0,0310 |
1,28 |
||||||||||
29 |
45,0 |
|
1000 |
220 |
86,0 |
0,0300 |
0,0160 |
1,28 |
|||||||||||
|
|
||||||||||||||||||
30 |
|
45,0 |
|
1180 |
340 |
86,0 |
0,0650 |
0,0310 |
1,28 |
||||||||||