

СИСТЕМА С И-РЕГУЛЯТОРОМ

СИСТЕМА С И-РЕГУЛЯТОРОМ

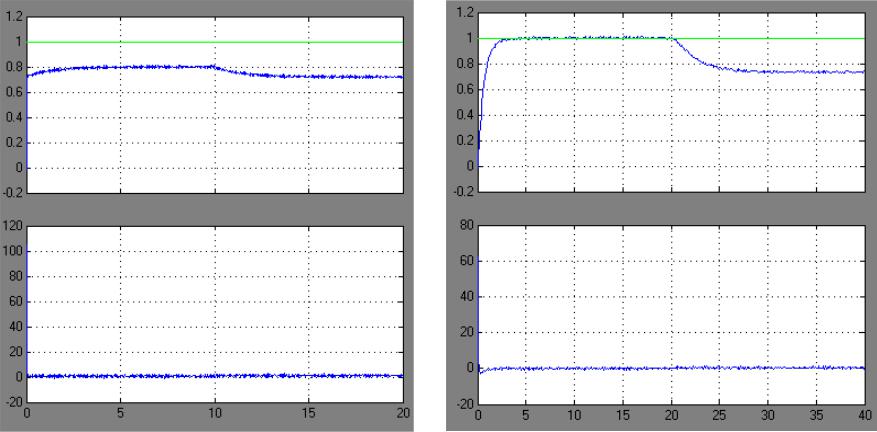
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В САР С И-регулятором
1.Статический объект |
2.Астатический объект |

СИСТЕМА С ПД-регулятором
Передаточная функция регулятора |
WРЕГ (S) KP |
KD S |
|
TD S 1 |
|||
|
|
УСТ X WX (0) F WF (0) |
|
1 |
|
X |
|
|
KОБ |
F 0 |
|
KОБ |
1 |
KP KОБ |
|||||
|
1 KP |
|
|
|||||

ПД-регулятор для астатического объекта
ПЕРЕХОДНЫЙ ПРОЦЕСС В САР С ПД-регулятором
1. |
Статический объект |
2. Астатический объект |

СИСТЕМА С ПИ-регулятором
Передаточная функция регулятора |
|
|
|
|
WРЕГ (S) KP |
|
Ki |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Статический объект |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
WX (S) |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
S(TОБ S 1) |
|
|
|
|
|||||||
|
|
|
|
(S) W |
|
|
(S) |
|
|
|
|
Ki |
|
|
|
KОБ |
T S 2 (1 K K |
|
)S K K |
|||||||||||||||||||||||
|
1 W |
|
|
|
|
1 (KP |
|
) |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
РЕГ |
|
|
ОБ |
|
|
|
|
|
|
|
|
ОБ |
|
|
|
|
|
|
P |
ОБ |
|
i |
|
ОБ |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
TОБ S 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
WF (S) |
|
|
|
WОБ (S) |
|
|
|
|
|
|
|
|
|
|
|
KОБ S |
|
|
|
|
|
|
|
|
||||||||||||||||||
1 W |
РЕГ |
(S) W (S) |
|
|
T S 2 |
(1 K |
P |
K |
ОБ |
)S K |
K |
ОБ |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ОБ |
|
|
|
|
|
|
|
ОБ |
|
|
|
|
|
|
|
|
|
i |
|
||||||||||
УСТ |
X WX |
(0) F WF (0) 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
(1 K |
P |
K |
ОБ |
) (1 K |
P |
K |
ОБ |
) |
2 4T K |
K |
ОБ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
S1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОБ |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2TОБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
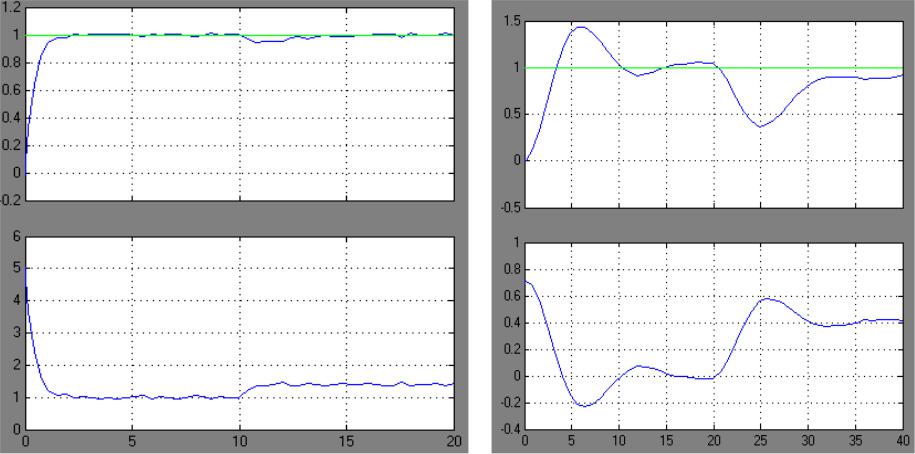
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В САР С ПИ-регулятором
1. Статический объект |
2. Астатический объект |

СИСТЕМА С ПИД-регулятором
1. Статический объект |
2. Астатический объект |
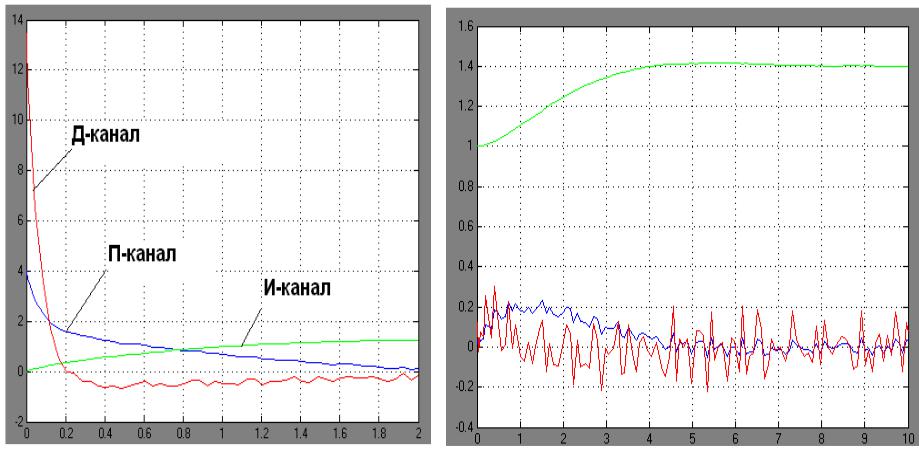
РАБОТА РАЗЛИЧНЫХ КАНАЛОВ ПИД-регулятора
1. Отработка ступенчатого задания 2. Подавление ступенчатого возмущения