

А.Н.Евграфов, Г.Н.Петров. Теория механизмов и машин. Лекция 3.
Глава 2. Геометрия и кинематика механизмов
Геометрический анализ механизмов
Пусть задан некоторый механизм (рис. 2.1): его структура и размеры звеньев, а также входная обобщенная координата q. Целью геометрического анализа является определение зависимостей выходных параметров (например, углов поворота 2 и 3 звеньев 2 и 3 или координат некоторой точки К) от координаты q. Зависимость выходных параметров от входных обобщенных координат механизма называется функцией положения механизма.
Д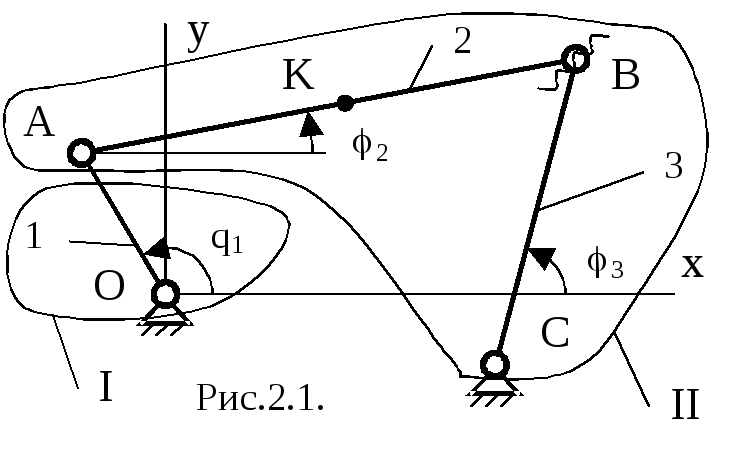 ля
механизма, показанного на рис. 2.1, функции
положения могут быть записаны в общем
виде:
ля
механизма, показанного на рис. 2.1, функции
положения могут быть записаны в общем
виде:
![]() (2.1)
(2.1)
Определение функций положения механизма составляет прямую задачу геометрического анализа. Если известен закон изменения входной координаты q1(t), то, решив прямую задачу, можно найти законы изменения выходных параметров хК(t)=ПХк[q1(t)], yK(t)=ПYk[q1(t)] и т.д. Рассмотрим последовательность составления функции положения.
Проводится структурный анализ механизма. В шарнирном четырехзвеннике, как уже отмечалось, можно выделить однозвенную одноподвижную группу I, включающую в себя кривошип 1 и вращательную пару 0, и группу Ассура II типа ВВВ, содержащую звенья 2 и 3 и три вращательные пары А, В и С.
В каждой структурной группе вводятся входные и выходные координаты. Входными координатами группы являются входные обобщенные координаты механизма, попавшие в данную группу (например, координата q1 в группе I на рис. 2.1), и координаты, определяющие положение кинематических пар предыдущих групп, к которым присоединяется рассматриваемая группа (например, для группы II на рис. 2.1 это координаты точек А и С: хА, уА, хС, уС).
Выходные координаты группы– координаты, определяющие положение кинематических пар, к которым присоединяются последующие группы, а также выходные координаты механизма (для группыIна рис. 2.1 это координаты точки А: хА, уА, для группыIIэто, например, координаты точки К: хК, уК.
Путем размыкания некоторых кинематических пар структурные группы приводят к открытым кинематическим цепям типа «дерево». Группа Iна рис. 2.1, присоединенная к стойке, уже образует структуру «дерева», поэтому в ней ничего размыкать не надо. В группеIIразмыкание можно провести, например, в шарнире В. Тогда, присоединив звено 3 к стойке или звено 2 к группеI, мы получим открытые кинематические цепи типа «дерево». При размыкании кинематических пар происходит размыкание связей; в частности, в плоских механизмах в одноподвижных парах размыкаются две связи, а в двухподвижных – одна. Таким образом, при размыкании шарнира В размыкаются две связи (хВ, уВ).
Вводятся групповые координаты, определяющие, вместе с входными, положение звеньев «дерева». На рис. 2.1 это углы2и3.
Составляются условия замыкания ранее разомкнутых связей и функции положения. Например, координаты точки В, принадлежащей звену 2, должны быть равны координатам точки В, принадлежащей звену 3: хВ2=хВ3, уВ2=уВ3. На основе этих условий получаютсягрупповые уравнения, связывающие входные, выходные и групповые координаты структурной группы.
Введем обозначение: l1,l2,l3– длины звеньев 1, 2 и 3. Тогда получим следующие соотношения для механизма на рис. 2.1.
Функции положения для группы I:
![]() (2.2)
(2.2)
Групповые уравнения для группы II:
![]() (2.3)
(2.3)
Функции положения группы II:
![]() (2.3’)
(2.3’)
Уравнения (2.3) получены из условия замыкания связей в шарнире В.
Уравнения (2.2) можно назвать функцией положения точки А. В этих уравнениях известны длина l1и входная обобщенная координатаq1; неизвестными являются координаты точки А. Таким образом, функция положения точки А получена в явном виде. К сожалению, это удается сделать только для некоторых самых простых механизмов и структурных групп. В уравнениях (2.3) заданными являются размеры звеньевl2иl3и координаты точек А и С; неизвестными являются выходные координаты2и3; следовательно, уравнения (2.3) – это функции положения звеньев 2 и 3, полученные в неявном виде.
Если механизм обладает не одной, а Wстепенями подвижности, то входных обобщенных координат у него такжеW:q1,q2, …qW. Функции положения записываются в виде:
![]() s=1,
…,m,
(2.4)
s=1,
…,m,
(2.4)
где m– число выходных координат.
Рассмотрим составление функций положения на примере плоской платформы (рис. 2.2). В лекции 2 было установлено, что число степеней подвижности платформы равно 3, следовательно, надо задать три входные обобщенные координаты: q1,q2,q3. Если это сделать так, как показано на рис. 2.2, то механизм распадается на три структурные группы: однозвенные одноподвижныеIиIIи трехзвенную одноподвижнуюIII. Введем входные и выходные координаты.
Г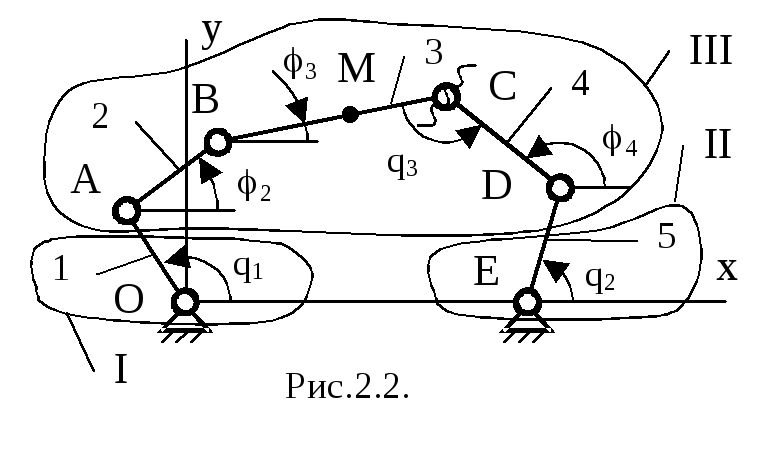 руппаI: входные координаты х0,
у0,q1, выходные
координаты хА, уА;
руппаI: входные координаты х0,
у0,q1, выходные
координаты хА, уА;
Группа II: входные координаты хЕ, уЕ,q2, выходные координатыxD,yD;
Группа III: входные координаты хА, уА, хD, yD, q3, выходные координаты хМ, уМ,3.
Произведем размыкание группы III в шарнире C и введем групповые координаты: 2,3, и4. Запишем условия замыкания: xC3=xC4, уC3=yC4. Далее составим групповые уравнения:
Группа I:![]()
Группа II:![]()
Группа III:![]() (2.5)
(2.5)
Дополнительное уравнение для углов получим из рис. 2.2:
3+q3=4. (2.6)
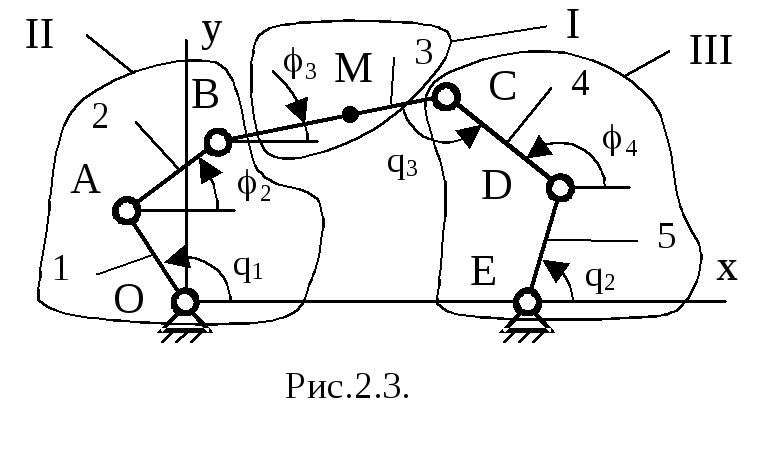
Часто в инженерной практике закон движения выходного звена уже задан в техническом задании; требуется определить закон изменения входных координат. Это вынуждает решать обратную задачугеометрического анализа: определение обобщенных входных координат в зависимости от выходных, т.е. отыскание функций:
qк=Фк(х1,…, хm), к=1,…,W. (2.7)
Если число выходных координат mравно числу степеней подвижностиW, то задача может иметь одно или несколько дискретных значений, т.е. функции Фксуществуют как однозначные или многозначные. Еслиm>W, то задача в общем случае не имеет решения; приm<Wнекоторое число координат (а именноW-m) можно задать произвольно.
Рассмотрим решение обратной задачи геометрии на примере трехподвижной платформы. Заданными являются все размеры звеньев и выходные координаты: хМ, уМ,3. Надо определить входные обобщенные координатыq1,q2,q3. Применим структурную инверсию, т.е. входными координатами будем считать хМ, уМ,3,а выходными координатами -q1,q2,q3(рис. 2.3). В этом случае, как отмечалось в лекции 2, механизм разбивается на три группы:I– однозвенная трехподвижная,IIиIII– двухзвенные группы Ассура типа ВВВ.
Составим уравнения для группы I:
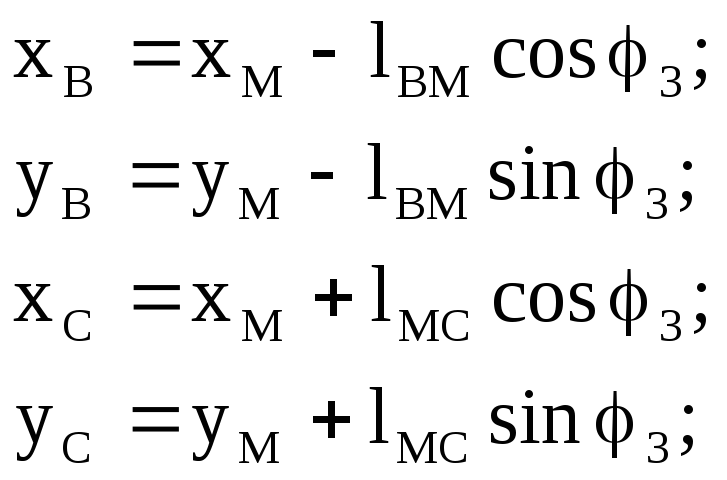 (2.8)
(2.8)
Для группы II:
![]() (2.9)
(2.9)
Для группы III:
![]() (2.10)
(2.10)
Дополнительное уравнение для углов:
3+q3=4.