

17.5. Пример расчёта статически неопределимой рамы на смещение опорных связей в обычной форме
В раме, показанной на рис. 17.9,а, горизонтальная связь левой опоры получила перемещение влево на (1)= 2 см, вертикальная связь этой же опоры – вниз на(2)= 1 см. Изгибная жёсткость поперечных сечений стержней рамы известна и равна постоянной величинеEJ. Требуется построить эпюры внутренних усилий от заданного смещения опорных связей.

В п. 17.2 эта же рама была рассчитана на температурное воздействие. Некоторыми результатами этого расчета воспользуемся в рассматриваемом примере.
1. Определение степени статической неопределимости и выбор статически определимой основной системы метода сил (см. п. 17.2, рис. 17.9,б).
2. Построение
эпюры изгибающих моментов М1и
вычисление реакций в смещаемых связях![]() в
основной системе от Х1= 1
(рис. 17.9,в).
в
основной системе от Х1= 1
(рис. 17.9,в).
3. Вычисление коэффициентов разрешающего уравнения метода сил
11Х1+1с= 0.
![]() (см. п. 17.2).
(см. п. 17.2).
Перемещение по направлению Х1от заданного смещения опорных связей определим по формуле (17.13).
![]() (рад).
(рад).
4. Решение уравнения метода сил:
![]() .
.
5. Определение изгибающих моментов в характерных сечениях рамы от заданных смещений горизонтальной и вертикальной связей левой опоры и построение эпюры Мс(рис. 17.9,г). Из первого выражения группы соотношений (17.14) следует:
Mc=M1X1, гдеX1= 7610-5EJ.
6. Кинематическая проверка эпюры Мспо формуле (17.15). В этой формуле сохраним только первый член, учитывающий изгибные деформации элементов рамы.

Результат сопряжения эпюр Мси М1совпадает с численным значением правой части разрешающего уравнения метода сил11Х1= –1с= –(-0,66710-2) = 66710-5с относительной погрешностью вычислений:
=
![]() = 2,55 %,
= 2,55 %,
что подтверждает правильность вычисления ординат эпюры Мс.
7. Построение эпюры поперечных сил Qcпо эпюре изгибающих моментов Мси эпюры продольных силNcпо эпюреQc. Читателям предлагается самостоятельно выполнить построение эпюрQc и Nc.
17.6. Пример расчёта статически неопределимой рамы на смещение опорных связей в матричной форме
В раме, показанной на рис. 17.10, возможны следующие независимые друг от друга кинематические воздействия: первое – перемещение вертикальной связи левой опоры вниз на (1)= 2 см, второе – перемещение горизонтальной связи вправо на(2)= 1,5 см и вертикальной вверх на(3)= 1 см опоры центральной стойки, третье – перемещение правой опоры вверх на(4)= 3 см. Численные значения изгибных жесткостей поперечных сечений ригеляEJpи стоекEJсрамы заданы:EJp= 2EJ,EJс= 0,5EJ(EJ– известное число). Требуется вычислить элементы матрицы изгибающих моментов Мсдля характерных сечений заданной рамы от каждого из вышеперечисленных кинематических воздействий.

Для расчёта рамы в матричной форме с учётом только изгибных деформаций её элементов используем соотношение (17.21). В этом случае L= М, В = ВМ,Sc = Mcи матричное выражение (17.21) примет вид:
![]() .
.
В дальнейшем воспользуемся некоторыми результатами расчёта этой же рамы на силовое воздействие (см. п. 16.8 шестнадцатой лекции).
1. Выбор основной системы метода сил (рис. 16.14,б, рис. 17.10), построение в ней эпюр изгибающих моментов от Х1= 1, Х2= 1 (рис. 16.14,в,г), нумерация участков и сечений (рис. 16.16), формирование матриц изгибающих моментов в основной системе от Х1= 1, Х2= 1 и внутренней упругой податливости рамы М и ВМ, вычисление элементов матрицы внешней податливости= МТВММ, обращение этой матрицы.

Примечание. Для расчёта рамы на температурное воздействие (см. п. 17.3) и в настоящем примере количество сечений на грузовых участках ригеля сохранено таким же, как и при расчёте рамы на силовое воздействие (рис. 16.16). Это обусловлено тем, что расчёт статически неопределимых систем на температурные и кинематические воздействия с помощью вычислительной техники производится вместе с расчётом на силовое воздействие. В частности, на кафедре строительной механике НГАСУ для расчёта статически неопределимых систем методом сил на все виды независимых друг от друга воздействий (силовые, температурные и кинематические) используется программа "Mefor", разработанная профессором В.Г. Себешевым.
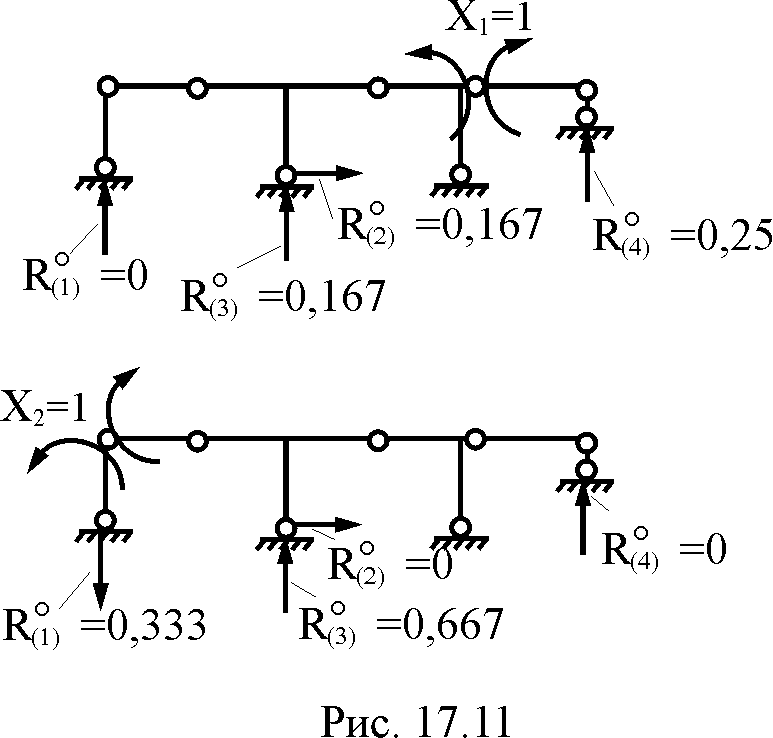
2. Формирование матрицы реакций в связях, получивших перемещение, от Х1= 1, Х2= 1 в основной системе (рис. 17.11).
 .
.
В первой строке этой матрицы сначала от Х1= 1 (первый столбец), затем от Х2= 1 (второй столбец), зафиксированы реакции вертикальной связи левой опоры, во второй – реакции горизонтальной связи опоры центральной стойки, в третьей – вертикальной связи опоры центральной стойки, в четвёртой – правой опорной связи. Напоминаем, что реакция в смещаемой связи вносится в матрицуRcсо знаком "плюс", если её направление совпадает с направлением смещения связи, и со знаком "минус", – если не совпадает.
3. Составление матрицы величин перемещений опорных связей (в м) по вариантам воздействий.

4. Вычисление матрицы перемещений по направлениям Х1и Х2от заданных кинематических возмущений в основной системе, или матрицы свободных членов системы канонических уравнений (17.16).
с=![]() =
=

![]()
5. Определение элементов матрицы неизвестных метода сил.
X = –-1c = –(MT BM M)-1 (Rc E (c)) =
![]() =
=
![]() .
.
6. Получение матрицы изгибающих моментов Мсв заданной раме по вариантам кинематических воздействий (рис. 17.10) в соответствии с принятой нумерацией участков и сечений (рис. 16.16).

Читателям предлагается (используя соотношение (17.22), самостоятельно произвести кинематическую проверку правильности вычисления элементов матрицы Мси построить для заданной рамы сначала эпюры изгибающих моментов, а затем и эпюры поперечных и продольных сил от упомянутых выше смещений опорных связей.