

4. Порядок выполнения работы.
В соответствии с полученным вариантом задания (см. таблицу 5) выполнить следующие работы.
1). Построить переходные характеристики САР с П, ПИ, ПД и ПИД регуляторами, используя операцию обратного преобразования Лапласа. Для построения использовать передаточные функции и методику п.2.
Результат расчета представить графически (см. рис.5).
2). Построить переходные характеристики САР с П, ПИ, ПД и ПИД регуляторами, используя функцию Rkadapt()Mathcad. Для построения использовать передаточные функции и методику п.3.
Результат расчета представить графически.
Сравнить результаты расчета по п.1 и 2.
3). По графикам переходных характеристик определить показатели качества процесса регулирования:
время регулирования,
величину перерегулирования,
число колебаний за время регулирования,
период колебаний.
Таблица 5 – Варианты задания коэффициентов передаточной функции САР
|
Вариант |
k1 |
T1 |
k2 |
T2 |
T3 |
|
1 |
1 |
1 |
1 |
0.1 |
1 |
|
2 |
1 |
1 |
1 |
0.2 |
1 |
|
3 |
1 |
1 |
1 |
0.3 |
1 |
|
4 |
1 |
1 |
1 |
0.4 |
1 |
|
5 |
1 |
1 |
1 |
0.5 |
1 |
|
6 |
1 |
1 |
1 |
0.6 |
1 |
|
7 |
1 |
1 |
1 |
0.7 |
1 |
|
8 |
1 |
1 |
1 |
0.8 |
1 |
|
9 |
1 |
1 |
1 |
0.9 |
1 |
|
10 |
1 |
1 |
1 |
1 |
1 |
5. Содержание отчета
1. Наименование работы.
2. Цель работы.
3. Задание на работу.
4. Вывод передаточных функций САР с П, ПИ, ПД, ПИД регуляторами для объекта регулирования – инерционного звена.
5. Порядок получения переходной характеристики САР с использованием обратного преобразования Лапласа.
6. Порядок получения переходной характеристики САР с использованием функции MathcadRkadapt().
7. Графики переходных процессов САР для полученного варианта задания.
8. Количественные оценки показателей качества процесса регулирования.
6. Контрольные вопросы
1. Свойства пропорционального звена.
2. Свойство интегрирующего звена.
3. Свойства дифференцирующего звена.
4. Свойства инерционного звена.
4. Что такое обратная связь?
5. Что такое передаточная функция?
6. Что такое переходная характеристика?
7. Понятие о прямом и обратном преобразовании Лапласа, его свойства.
8. Порядок реализации прямого и обратного преобразования Лапласа вMathcad.
9. Что такое обыкновенное дифференциальное уравнение?
10. Порядок использования функций численного решения ОДУ вMathcad.
11. Перечислите показатели качества САР.
7. Пример выполнения этапов работы для сар с пид регулятором.
Обратное преобразование Лапласа:
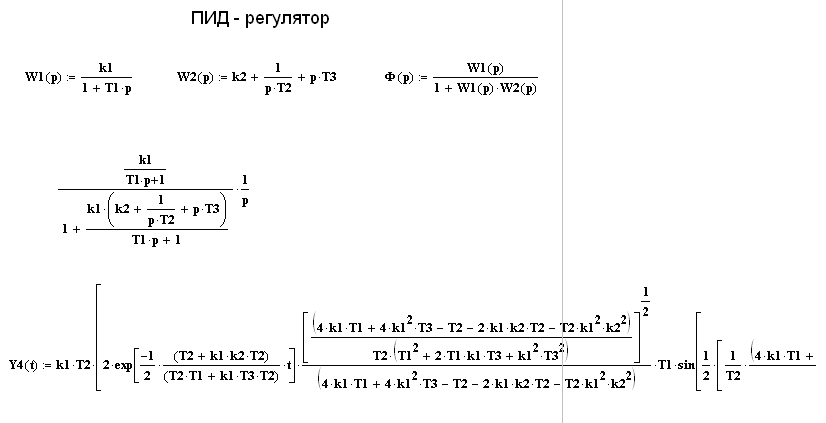
Графическое представление переходного процесса САР:

Решение системы ОДУ для разложения передаточной функции с помощью дополнительных переменных:
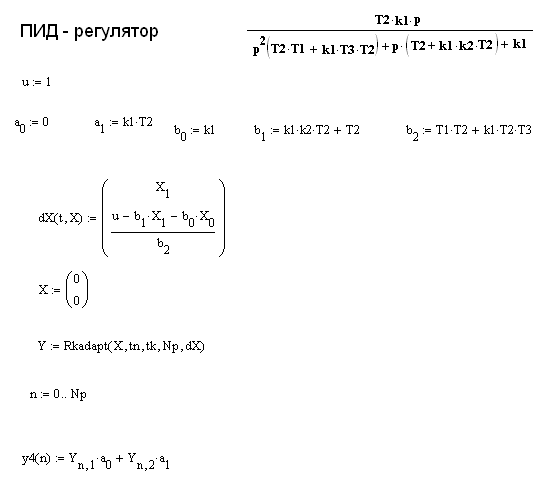
Графическое представление переходного процесса САР:

Показатели качества процесса регулирования:
время регулирования – 20с,
величина перерегулирования – 0,45,
число колебаний за время регулирования - 2,
период колебаний – 10с.
Литература.
1 Дьяконов В.П. Справочник по MathCADPLUS7.0PRO- М.: СК Пресс, 1998 - 352 с.
2 Дьяконов В.П. MATHCAD 8/2000: Специальный справочник – СПб.: Издательство «Питер», 2000 – 592 с.
3 Кудрявцев Е.М. Mathcad 8. – М.: ДМК, 2000 – 320 с.
4 Тарасик В.П. Математическое моделирование технических систем: Учебник для вузов. - Мн.: ДизайнПРО, 1997. -640 с.
5 Трофимов А.И., Егупов Н.Д., Дмитриев А.Н. Методы теории автоматического управления, ориентированные на применение ЭВМ. Линейные стационарные и нестационарные модели: Учебник для вузов. - М.: Энергоатомиздат, 1997. - 656 с.
6. www.cdo.bru.mogilev.by
Приложение
Функции численного интегрирования дифференциальных уравнений
Для решения векторной формы системы обыкновенных дифференциальных уравнений в виде векторной функции F используются функции:
rkadapt(y0,tн,tк,acc,n,F,k,s) – численное интегрирование матрицы переменных состояния на интервале времени от tн до tк с числом шагов n с максимальным числом промежуточных точек решения k и минимально допустимым интервалом между точками s с помощью адаптированного метода Рунге-Кутта с переменным шагом, погрешностью acc и начальными условиями в векторе y0;
Rkadapt(y0,tн,tк,n,F) – численное интегрирование матрицы переменных состояния на интервале времени от tн до tк с числом шагов n с помощью адаптированного метода Рунге-Кутта с переменным шагом и начальными условиями в векторе y0;
rkfixed(y0,tн,tк,n,F) – численное интегрирование матрицы переменных состояния на интервале времени от tн до tк с числом шагов n с помощью метода Рунге-Кутта с постоянным шагом и начальными условиями в векторе y0;
Bulstoer(y0,tн,tк,n,F) – численное интегрирование матрицы переменных состояния на интервале времени от tн до tк с числом шагов n с помощью метода Булирша-Штера с начальными условиями в векторе y0.
Для решения “жестких” систем дифференциальных уравнений в MathCAD используются функции:
bulstoer(y0,tн,tк,acc,n,F,k,s) – численное интегрирование матрицы переменных состояния на интервале времени от tн до tк с числом шагов n с помощью метода Булирша-Штера с переменным шагом, погрешностью acc и начальными условиями в векторе y0;
Stiffb(y0,tн,tк,n,F,J) – численное интегрирование матрицы жесткой системы уравнений на интервале времени от tн до tк с числом шагов n с помощью метода Булирша-Штера с переменным шагом и начальными условиями в векторе y0 для матрицы якобиана J.
stiffb(y0,tн,tк,acc,n,F,J,k,s) – численное интегрирование матрицы жесткой системы уравнений на интервале времени от tн до tк с числом шагов n с помощью метода Булирша-Штера с максимальным числом промежуточных точек решения k, минимально допустимым интервалом между точками s переменным шагом, точностью acc и начальными условиями в векторе y0 для матрицы якобиана J;
Stiffr(y0,tн,tк,n,F,J) – численное интегрирование матрицы жесткой системы уравнений на интервале времени от tн до tк с числом шагов n с помощью метода Розенброка с переменным шагом и начальными условиями в векторе y0 для матрицы якобиана J.
stiffr(y0,tн,tк,acc,n,F,J,k,s) – численное интегрирование матрицы жесткой системы уравнений на интервале времени от tн до tк с числом шагов n с помощью метода Розенброка с максимальным числом промежуточных точек решения k, минимально допустимым интервалом между точками s переменным шагом, точностью acc и начальными условиями в векторе y0 для матрицы якобиана J.