

ртцис
.pdf11
|
s(t) |
δ(t) |
|
0 |
t |
|
|
s(t) |
|
|
δ(t-t0) |
0 |
t0 |
t |
Рисунок 1.2 − Фильтрующее свойство δ – функции и перенос действия из начала координат в точку t0
б) |
Фильтрующее свойство δ – функции. |
|
||||
Использование δ |
– функции позволяет аналитическим путем опреде- |
|||||
лить значение сигнала в произвольной точке t0 : |
|
|||||
|
t2 |
|
|
|
|
|
|
∫s(t) δ(t)dt =s(0),t1 < 0 < t2 , |
(1.4) |
||||
|
t1 |
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
∫s(t) δ(t −t0 )dt =s(t0 ), t1 < t0 < t2 . |
(1.5) |
||||
|
t1 |
|
|
|
|
|
в) |
Дифференцирование δ – функции. |
|
||||
Применяя δ – функцию, можно оценить скорость изменения сигнала в |
||||||
точке t0 : |
′ |
≠ t0 , |
(1.6) |
|||
|
|
|||||
|
|
δ (t −t0 ) = 0, t |
||||
|
t2 |
t2 |
|
|
|
|
|
∫s(t) δ′(t −t0 )dt =− ∫s′(t) δ(t −t0 )dt =− s′(t0 ) . |
(1.7) |
||||
|
t1 |
t1 |
|
|
|
|
г) |
Интегрирование δ – функции. |
|
|
|
||
Интегрирование δ – функции приводит к возникновению функции Хе- |
||||||
висайда σ(t) : |
|
|
|
|
|
|
|
t |
1,t > 0, |
|
|||
|
|
1 |
|
|
|
|
|
∫δ(τ)dτ =σ(t) = |
2 |
,t = 0, |
(1.8) |
||
|
−∞ |
|
|
|
|
|
|
|
0,t < 0. |
|
|||
На функции Хевисайда (единичном скачке) остановимся подробнее. Единичный скачок не является функцией в смысле классического анализа.
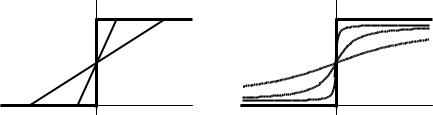
Определяют функцию Хевисайда σ(t) как предел интеграла от дельта-
образующих семейств. Два семейства, переходящие в пределе к функции Хевисайда, изображены на рисунке 1.3.

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.1. Дельта-образующие функции |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Аналитическое выражение |
Графическое представление |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
, |
|
t |
|
≤ |
τ |
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
||||||||||
δ(t) = lim τ |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
τ→0 |
|
|
|
|
t |
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
> 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
0, |
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α 2 |
|
|
|
|
|
|
|
|
|
|||||
δ (t ) = lim |
|
e |
−α |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
α → ∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ ( t ) = |
lim |
|
|
α e −αt , t ≥ 0 |
|
α |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
α → ∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ(t) = |
lim |
|
sinωt |
|
|
|
|
|
|
|
|
|
|
ω π |
|
|
|
|
|
||||||||||||||||||||
|
ω→∞ |
|
|
|
|
πt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
δ (t) = |
lim |
|
|
|
|
|
∫e jΩt dΩ |
|
|
|
|
|
|
|
|
t |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
π |
|
2ω |
||||||||||||||||||||||||||
|
ω →∞ 2π |
−ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
απ |
|
|
|
|
|
|
|
|
|
|
|
|
1απ |
|
|
|
|
|
|||||||||||
δ (ω) = lim |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
α→0 α2 +ω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
δ(ω) = lim |
sin ω t |
|
|
|
t |
π |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
π ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
t→∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
δ (ω) = lim |
|
|
|
|
∫e− jωτ dτ |
|
|
π 2 |
ω |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
t →∞ 2π |
−t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
sinωτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
σ(t) = ∫δ(τ)dτ = ωlim→∞ |
∫ |
dτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
πτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13
1 |
|
0 |
t |
1 |
|
0 |
t |
Рисунок 1.3 − Образование функций Хевисайда
Функцию Хевисайда изображают единичной ступенькой (с перебросом уровня в начале координат) и, видимо, поэтому называют функцией включения или единичным скачком.
Основные свойства функции Хевисайда: 1) аналитическая связь с δ – функцией
σ ′(t) = δ (t) , |
(1.9) |
|
2) формирование одностороннего сигнала s(t) из произвольной функции f (t)
|
f (t),t ≥ 0, |
(1.10) |
s(t) = f (t) σ(t) = |
||
|
0,t < 0, |
|
3) определение значения сигнала в произвольной точке |
|
|
∞ |
|
|
∫s(t) σ′(t − t0 )dt = s(t0 ) , |
(1.11) |
|
−∞ |
|
|
4) определение скорости изменения сигнала в точке |
|
|
∞ |
∞ |
|
∫s(t ) σ ′′(t − t0 )dt |
= ∫s(t ) δ ′(t − t0 )dt = −s′(t0 ) . |
(1.12) |
−∞ |
−∞ |
|
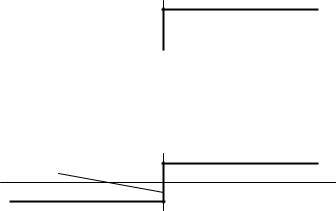
Единичный скачок можно представить суммой четной и нечетной составляющих (рисунок 1.4):
σ (t) = |
1 |
+ |
1 |
sign (t) . |
(1.13) |
|
2 |
|
2 |
|
|
В таблице 1.1 представлены различные дельта - образующие функции с единичной площадью, которые при выполнении предельного перехода приобретают свойства δ – функции. Используется δ – функция в подынтегральных выражениях для сокращения объема преобразований и обеспечения
14
ясности при дифференцировании не только непрерывных, но и разрывных функций.
1 σ(t)
0,5 |
|
0 |
t |
||
|
|||||
|
|||||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
0 |
t |
|
|
|||||
0,5sign(t) |
0,5 |
|
|
|
|
|
0 |
t |
|
-0,5 |
|
Рисунок 1.4 − Графическое представление единичного скачка
1.2Описание алгоритмов взаимодействия обобщенных функций и сигналов
Функцию Хевисайда и δ – функцию можно сдвигать, перемножать с другими функциями, интегрировать (например, по частям), дифференцировать и т.д. Соответствующий математический аппарат разработан.
Функция Хевисайда и δ – функция - это линейные операторы (или функционалы), которые работают по определенным правилам, сведенным в таблицу 1.2. Правила эти просты и удобны. Они заменяют большой объем классических математических преобразований. Физический смысл преобразований с помощью обобщенных функций будем выяснять в процессе ознакомления с дисциплиной. Единичный скачок и δ – функция – это не только функционалы, предписывающие правила преобразований, они имеют самостоятельное применение в качестве «испытательных» сигналов в теории цепей.
Рассмотрим различные преобразования, позволяющие аналитическим путем осуществить выбор момента времени и определить значения сигнала в произвольной точке:
∞ |
|
∫s(t) δ(t −t0 ) dt = s(t0 ) ; |
(1.14) |
−∞

15 |
|
∞ |
|
∫s(t)σ′(t −t0 )dt =s(t0 ) ; |
(1.15) |
−∞ |
|
∞ |
|
∫s′(t)σ(t −t0 )dt = −s(t0 ) . |
(1.16) |
−∞
Реализации преобразований в виде структурных схем содержат специализированные блоки, выполняющие следующие операции:
- умножение; - задержка во времени;
∑- сложение;
d |
- дифференцирование во времени; |
|
dt |
||
|
∫ |
- интегрирование во времени; |
A - усиление (с коэффициэнтом усиления A);
-A - усиление (с коэффициэнтом усиления A и инверсией).
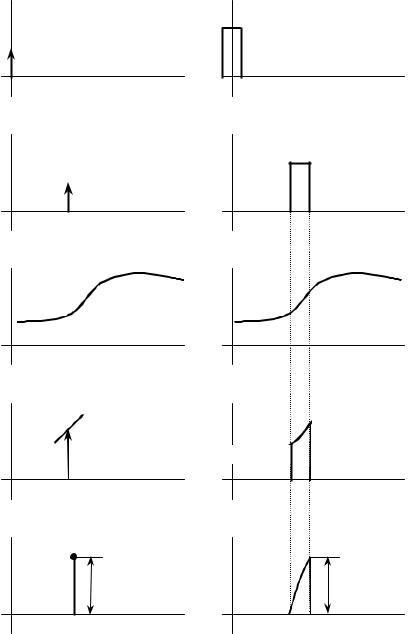
Структурная схема, соответствующая преобразованию (1.14), и временные диаграммы, поясняющие ее работу в отмеченных точках, изображены на рисунках 1.5 и 1.6.
1 |
2 |
|
t0 |
δ(t) |
δ(t-t0) |
s(t)
4 |
∫ |
5 |
δ(t-t0)s(t) |
s(t0) |
|
|
|
 3
3
Рисунок 1.5 − Реализация функционального преобразования (1.14)
|
|
|
16 |
|
|
s1(t) |
|
|
s1(t) |
|
|
|
|
|
|
rect(t) |
|
|
δ(t) |
|
|
|
|
0 |
|
t |
0 |
|
t |
s2(t) |
|
|
s2(t) |
|
|
|
δ(t-t0) |
|
|
|
rect(t-t0) |
|
|
|
|
|
|
0 |
t0 |
t |
0 |
t0 |
t |
s3(t) |
s(t) |
|
s3(t) |
|
s(t) |
|
|
|
|
||
0 |
|
t |
0 |
|
t |
s4(t) |
|
|
s4(t) |
|
s(t) rect(t-t0) |
|
|
|
|
|
|
|
s(t0) δ(t-t0) |
|
|
|
|
0 |
t0 |
t |
0 |
t0 |
t |
s5(t) |
|
|
s5(t) |
|
|
|
s(t0) |
|
|
|
s(t0), t ≥ t0+τ/2 |
0 |
t0 |
t |
0 |
t0 |
t |
а) б)
Рисунок 1.6 − Временные диаграммы (эпюры напряжений в контрольных точках схемы рис. 1.5), поясняющие аналитический выбор значения сигнала в произвольный момент времени с помощью двух «испытательных» функций: а) δ –функции и б) прямоугольного импульса конечной длительно-
сти rect(t)
Структурные схемы, реализующие два способа определения значения сигнала в произвольный момент времени (1.15) и (1.16), представлены на рисунке 1.7.

17
σ(t) |
d |
σ′(t) |
σ′(t-t0) |
|
|
t0 |
|
|
dt |
|
|
s(t0)
 ∫
∫
s(t)
σ(t) |
t0 |
σ(t-t0) |
σ (t-t0) s′(t)
∫ |
-s(t0) |
-1 |
s(t0) |
|
|
||
|
|
|
|
s′(t)
s(t) |
d |
|
dt |
Рисунок 1.7 − Модификации структурных схем, соответствующие преобразованиям (1.15) и (1.16)
Путем аналогичных операций определяется скорость изменения сигнала в произвольной точке. Возможны различные формы записи интеграла взаимодействия сигнала и δ – функции с целью определения скорости:
∞ |
|
|
∫s′(t) δ(t −t0 ) dt = s′(t0 ) ; |
(1.17) |
|
−∞ |
|
|
∞ |
∞ |
|
∫s(t)δ′(t −t0 )dt = − |
∫s′(t)δ(t −t0 )dt − s′(t0 ) . |
(1.18) |
−∞ |
−∞ |
|
Структурные схемы, формально реализующие необходимые линейные операции, изображены на рисунке 1.8
δ(t) |
d |
|
dt |
а)
δ′(t) |
t0 |
δ′(t-t0) |
δ′(t-t0) s(t) |
∫ |
-s′(t0) |
-1 |
s′(t0) |
|
|
|
|
|
|
 s(t)
s(t)
δ(t) |
t0 |
δ(t-t0) |
δ (t-t0) s′(t) |
∫ |
s′(t0) |
|
|
|
|
|
б) |
s′(t) |
s(t) |
d |
|
dt |
Рисунок 1.8 − Два способа определения скорости изменения сигнала в точке t0: а) с инверсией и б) без инверсии
Таблица 1.2 – Правила взаимодействия обобщенных функций с сигналами
№ |
Описание преобразования |
|
Математическое описание преобразования δ -функции |
|
||||||||||
п/п |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ |
|
∞, t = 0, |
|
|
|
|
|
||||
|
Определение δ – функции и |
|
(t ) = |
|
|
|
|
|
|
|
|
|||
1 |
единичного |
|
|
0, t ≠ 0. |
|
|
|
|
|
|||||
скачка |
|
|
|
t |
|
|
|
1, t |
> 0, |
|
||||
|
|
σ |
|
(t ) = ∫ δ (t )dt = |
|
|||||||||
|
|
|
|
|
|
< 0. |
|
|||||||
|
|
|
|
|
−∞ |
|
|
|
0, t |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
∞ |
|
|
|
|
|
|
|
|
|||
2 |
Нормировка δ – функции |
|
∫δ (t ) dt = 1 |
|
|
|
|
|
|
|
|
|||
|
|
|
− ∞ |
|
|
|
|
|
|
|
|
|||
3 |
Сдвиг δ – функции во времени |
|
δ |
|
0, t ≠ t0 |
|
|
|
|
|||||
|
(t −t0 ) = |
|
|
t = t0 |
|
|
|
|
||||||
|
|
|
|
|
∞, |
|
|
|
|
18 |
||||
|
|
|
|
|
|
|
1 |
|
|
|
t0 |
|
|
|
4 |
Изменение масштаба времени |
|
δ |
(at −t0 ) = |
|
|
|
δ t − |
|
|
|
|
||
|
|
a |
|
a |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||||
5 |
Умножение сигнала на δ – функцию |
s (t )δ (t ) = s (0)δ (t ) |
|
|
|
|
|
|||||||
s (t )δ (t − t 0 ) = s (t 0 )δ (t − t 0 ) |
|
|||||||||||||
|
|
|
|
|||||||||||
|
|
|
t 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫s (t )δ (t ) dt = s ( 0 ) |
|
|
|
|
|||||||
|
|
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
|
Взаимодействие сигнала s(t) и δ |
|
t |
|
|
|
|
|
|
|
|
|
|
|
6 |
– функции; |
∫2 |
s ( t )δ ( t − t 0 ) dt |
= s ( t 0 ) |
|
|||||||||
|
t1 <t < t2 |
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
δ (τ − t )δ (τ − t 0 ) d τ = δ (t − t 0 ) |
|
||||||||
|
|
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
7 |
Дифференцирование δ – функции |
δ ′(t − t0 ) = 0, t ≠ t0 |
|
|||
|
|
|
|
|
|
|
|
|
|
t 2 |
t 2 |
|
|
|
|
|
∫s(t)δ ′(t)dt |
= − ∫s′(t )δ (t)dt = − s′(0) |
|
|
|
|
|
t1 |
t1 |
|
|
8 |
Взаимодействие сигнала s(t) и производных |
t2 |
t2 |
|
||
от δ – функции; |
t1 <t < t2 |
∫s(t)δ′(t −t0 )dt = − ∫s′(t)δ(t −t0 )dt = − s′(t0 ) |
|
|||
|
t1 |
t1 |
|
|||
|
|
|
|
|||
|
|
|
t2 |
t2 |
|
|
|
|
|
∫s(t)δ(n) (t −t0 )dt =(−1)n ∫s(n) (t)δ(t −t0 )dt =(−1)n s(n) (t0 ) |
|
||
|
|
|
t1 |
t1 |
|
|
|
|
|
∞ |
∞ |
|
|
|
Взаимодействие |
сигнала s(t) и функции |
∫s (t )σ (t )dt = ∫s(t )dt |
|
||
9 |
−∞ |
0 |
19 |
|||
Хевисайда; 0 <τ < t |
∞ |
t |
||||
|
|
|||||
|
∫s(τ )σ (t −τ )dτ = ∫s(τ )dτ |
|
||||
|
|
|
|
|||
|
|
|
−∞ |
−∞ |
|
|
|
|
|
∞ |
∞ |
|
|
|
|
|
s(0) = ∫s(t )σ ′(t )dt = − ∫s ′(t )σ (t )dt |
|
||
|
|
|
−∞ |
−∞ |
|
|
|
Взаимодействие |
сигнала s(t) и производной |
∞ |
∞ |
|
|
10 |
s(t0 ) = ∫s(t )σ ′(t − t0 )dt = − ∫s ′(t )σ (t − t0 )dt |
|
||||
|
от функции Хевисайда; 0 <τ < t |
−∞ |
−∞ |
|
||
|
|
|
|
|||
|
|
|
∞ |
∞ |
|
|
|
|
|
s(t ) = ∫s(τ )σ ′(t − τ )dτ = ∫s′(τ )σ (t − τ )dτ |
|
||
|
|
|
−∞ |
−∞ |
|
|
20
1.3 Энергетические характеристики сигналов
Электрическое колебание, представляющее собой изменение напряжения, тока, заряда или другой физической величины, называют сигналом. Все физические сигналы принимают вещественные значения s(t) . Однако, в тео-
рии сигналов и в теории цепей широко используются понятие комплексного сигнала Z&(t) , реальная часть которого совпадает с физическим сигналом s(t) :
Z&(t) = s(t) + jυ(t) . |
(1.19) |
Рассмотрим энергетические характеристики как вещественных, так и комплексных сигналов.
1.3.1 Энергетические характеристики вещественных сигналов
Основными энергетическими характеристиками вещественного сигнала s(t) являются: мгновенная мощность p(t) , энергия Э и средняя мощ-
ность P .
Мгновеннаямощность, выделяемаянасопротивлениинагрузки R , равна
|
|
|
u2 (t) |
|
2 |
|
(1.20) |
||
p(t) = |
R = i |
(t)R . |
|||||||
|
|
||||||||
Энергия и средняя мощность на интервале времени (t1 ,t2 ) определяют- |
|||||||||
ся выражениями (при условии R =1 Ом): |
|
||||||||
|
|
|
t2 |
2 (t)dt ; |
|
||||
Э = ∫s |
(1.21) |
||||||||
|
|
|
t1 |
t |
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
||
P = |
|
|
∫s2 (t)dt . |
(1.22) |
|||||
t |
|
−t |
|||||||
|
|
2 |
1 t |
|
|
|
|||
|
|
|
|
|
1 |
|
|
|
|
Энергетические характеристики суммы двух сигналов s1(t) и s2 (t)
кроме энергетических характеристик каждого сигнала содержат дополнительное слагаемое, которое определяет энергию взаимодействия этих сигналов:
p |
∑ |
(t) =[s |
(t )+ s |
2 |
(t )]2 = p |
(t) + p |
2 |
(t) + 2 p (t); |
(1.23) |
|
1 |
|
1 |
|
12 |
|
|||
|
|
t2 |
[s1(t )+ s2 (t )]2dt = Э1 +Э2 +2Э12 ; |
|
|||||
|
|
Э∑ = ∫ |
(1.24) |
||||||
|
|
t1 |
|
|
|
|
|
|
|
|
|
1 |
t2 |
[s1(t )+ s2 |
(t )]2 dt = P1 + P2 + 2P12 . |
|
|
P∑ = |
|
∫ |
(1.25) |
||||
t2 |
−t1 |
||||||
|
t1 |
|
|
|
|||
|
|
|
|
|
|