

Конспект ТЭС 2 сем
.pdfU mд1 = 
 U mг2 +U m 2 + 2UmгUm cosϕ ,
U mг2 +U m 2 + 2UmгUm cosϕ ,
U mд2 = 
 U mг2 +U m 2 −2U mгU m cosϕ .
U mг2 +U m 2 −2U mгU m cosϕ .
Токи i1 и i2 образуют выходные напряжения плеч противоположной полярно-
сти:
uвых1 = KдU mд1 ,
uвых2 = KдU mд2 .
Поэтому выходное напряжение равно их разности:
uвых = uвых1 −uвых2 .
Детекторная жарактеристика рассмотренного ФД показана на рисунке 23.3 (кривая 2).
Выводы:
- наилучшую линейность характеристика имеет вблизи углов ϕ = (2n +1)900 , при работе на этих участках детектирование осуществляется практически без искажений;
-знак выходного напряжения меняется при изменении фазы;
-крутизна характеристики балансного ФД в два раза больше крутизны характеристики однотактного ФД.
24 ДЕТЕКТИРОВАНИЕ МАНИПУЛИРОВАННЫХ СИГНАЛОВ
При приеме непрерывных и дискретных первичных сигналов возникают различные задачи приема. В первом случае это задача восстановления сигналов (получение принятого первичного сигнала, наименее отличающегося от переданного), во втором - задача обнаружения сигналов (получение ответа на вопрос, имеется на входе приемника сигнал или нет) или их различения (получение ответа на вопрос, какой из образцов сигналов s1 , s2 , … или sm имеется на входе).
В приемнике (демодуляторе) дискретных сигналов производится обработка, детектирование, анализ сигналов и принятие решения о переданном сигнале.
Обработка состоит в таком преобразовании сигналов, чтобы они имели максимальное отличие от помех и друг от друга. Как правило, сводится к тем или иным методам фильтрации.
Детектирование – операция выделения информационного параметра переносчика. Для детектирования манипулированных сигналов могут быть использованы ранее рассмотренные детекторы. Допустимость искажения формы детектированных сигналов (ее восстанавливать необязательно, т.к. она известна) позволяет снизить требования к линейности детекторной характеристики. В некоторых случаях детектор может и вовсе отсутствовать.
Анализ параметров приходящих сигналов и принятие решения о переданном сигнале по их различию происходит в решающем устройстве. Для двоичных сигналов это обычно сравнивающее устройство.
Даже идеально проведенное детектирование еще не означает, что будет обеспечена хорошая демодуляция дискретных сигналов. Поэтому нецелесообразно отдельно рассматривать особенности детектирования манипулированных сигналов. Работу демодулятора нужно рассматривать в целом, что реализовано в теории помехоустойчивости приема.
25 ДЕТЕКТИРОВАНИЕ ИМПУЛЬСНО-МОДУЛИРОВАННЫХ (ИМ) И
71

ДЕКОДИРОВАНИЕ ЦИФРОВЫХ СИГНАЛОВ
25.1 Детектирование им сигналов
Особенностью ИМ сигналов является наличие в их спектре низкочастотных составляющих модулирующего сигнала, поэтому для их детектирования требуется выделить ФНЧ эти спектральные составляющие и не требуется нелинейных элементов.
Пусть модулирующий сигнал – гармоническое колебание с частотой F. Спектр АИМ содержит дискретные составляющие с частотами: 0, F, nfд, nfд+F. Амплитуда полезной составляющей спектра при АИМ:
U mААИ = mАИМU m / q ,
где U m - амплитуда импульсов дискретизации;
q =T /τ - скважность импульсов дискретизации;
mАИМ - индекс АИМ.
Если q <10 , то детектирование АИМ сигнала выполняет ФНЧ. Он выделяет
компоненту спектра с частотой F (полезную составляющую) и подавляет ближайшую к ней компоненту с частотой fд − F (мешающую).
Рисунок 25.1 – Структурная схема детектора АИМ сигнала при q <10 . Если q ≥10 , то составляющая частоты модуляции в спектре АИМ сигнала мала.
В этом случае детектирование осуществляется с помощью пикового детектора. Он позволяет получить больший по сравнению с ФНЧ уровень выходного сигнала. Пиковый детектор – АД, выходное напряжение которого пропорционально максимальному (пиковому) значению импульсов. Для работы детектора в пиковом режиме и отсутствия искажений детектируемого сигнала постоянная времени нагрузки детектора τн = RнCн должна удовлетворять неравенствам:
T <<τн <<1/ Fmax ,
где T - период следования импульсов;
Fmax - максимальная частота спектра модулирующего сигнала.
Рисунок 25.2 – Структурная схема детектора АИМ сигнала при q ≥10 .
Перед детектированием всех остальных видов импульсной модуляции для повышения их помехоустойчивости осуществляется регенерация (восстановление формы импульсов). Для этого амплитудным ограничителем (АО) производится двустороннее ограничение импульсов на уровнях, близких к половине пикового значения импульсов. Это уменьшает влияние импульсных помех, устраняет флуктуационный шум в интервале между импульсами и в середине импульсов. Остаются влияния шума на фронты импульсов (вызывают сдвиг фронтов во времени) и мощных импульсных помех (вызывают дополнительные ложные импульсы).
72
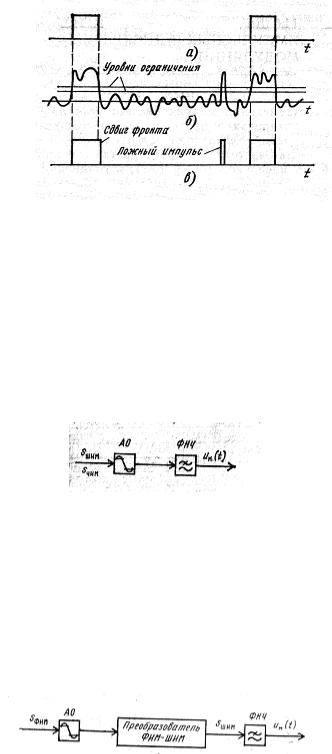
Рисунок 25.3 – Регенерация ИМ сигналов: а - ИМ сигнал без помехи; б - смесь ИМ сигнала и помехи; в - регенерированный ИМ сигнал.
Спектр при ШИМ и ЧИМ богаче, чем при АИМ и содержит дискретные составляющие с частотами: 0, F, nfд, nfд+mF. Амплитуда полезной составляющей спектра при ШИМ:
UmШШИ = mШИМU m / q ,
где mШИМ - индекс ШИМ.
Амплитуда составляющей частоты модуляции при ШИМ и ЧИМ значительно превышает амплитуды соседних по спектру мешающих составляющих, поэтому детектирование ШИМ и ЧИМ осуществляется ФНЧ.
Рисунок 25.4 – Структурная схема детектора ШИМ и ЧИМ сигналов. Спектр при ФИМ содержит дискретные составляющие с частотами: 0, F, nfд,
nfд+mF. Амплитуда полезной составляющей спектра:
U mФФИ =U m ∆τmax 2πF / q ,
где ∆τmax - максимальное смещение фронта импульса при модуляции.
Из выражения следует, что уровень полезной составляющей незначителен и зависит от частоты модуляции, поэтому детектирование ФИМ сигнала не может осуществляться ФНЧ. Сигналы ФИМ сначала преобразуются в АИМ или ШИМ сигналы, которые затем детектируются ФНЧ.
Рисунок 25.5 – Структурная схема детектора ФИМ сигналов.
25.2 Декодирование цифровых сигналов
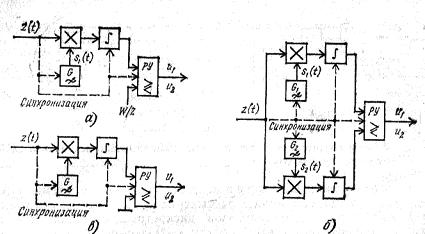
Преобразование цифрового ИКМ сигнала в непрерывный при ИКМ осуществляется декодером и ФНЧ. В состав декодера входит преобразователь последовательного кода в параллельный и сумматор с весом 2i−1 , где i - номер разряда единицы в кодовой комбинации. Амплитуда импульса на выходе сумматора определяется кодовой комбинацией на входе декодера, т.е. на его выходе появляется квантованный АИМ сигнал, детектирование которого осуществляет ФНЧ.
73
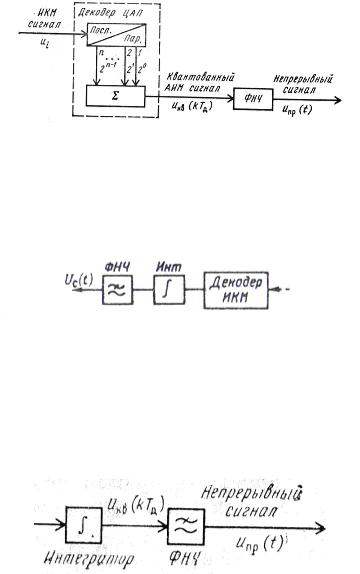
Рисунок 25.6 – Структурная схема цифро-аналогового преобразователя (ЦАП) ИКМ.
Преобразование ДИКМ сигнала в непрерывный осуществляется декодером ИКМ, интегратором и ФНЧ. На выходе декодера получают сигнал, соответствующий разности соседних отсчетов. Эти отчеты интегратор преобразует в ступенчатое напряжение, а ФНЧ сглаживает его.
Рисунок 25.7 – Структурная схема ЦАП ДИКМ и временные диаграммы его работы.
Формирование из ДМ сигнала аналогового сигнала осуществляется интегратором и ФНЧ. Интегратор имеет импульсный отклик в виде ступеньки напряжения, причем отклики на каждый из импульсов суммируются, и выходное напряжение будет иметь вид ступенчатой функции времени. Восстановление аналогового сигнала из дискретизированного и квантованного осуществляется ФНЧ.
Рисунок 25.8 – Структурная схема ЦАП ДМ и временные диаграммы его работы.
26 ПОМЕХОУСТОЙЧИВОСТЬ ПРИЕМА СИГНАЛОВ
26.1 Основные понятия
Помехоустойчивость (ПУ) является одним из основных показателей качества системы связи.
Представляет собой способность системы связи противостоять вредному действию помех на верность воспроизведения сообщений. Верность – степень соответствия принятого сообщения переданному.
ПУ зависит от вида передаваемых сообщений, уровня и характеристик помех, параметров составных частей системы.
Различают потенциальную и реальную ПУ. Первая представляет собой предельно достижимую помехоустойчивость при заданных сигналах и помехах. Эту ПУ обеспечивает специально сконструированный оптимальный (наилучший) приемник.
Реальная ПУ – это ПУ системы связи с учетом реального выполнения и настройки ее узлов. Она зависит от множества факторов и параметров отдельных звеньев системы связи. Реальная ПУ всегда меньше потенциальной.
Их сравнение позволяет дать оценку качества реального устройства и найти еще не использованные резервы повышения реальной ПУ.
26.2 Количественная мера ПУ
74

При передаче непрерывных первичных сигналов таковой являются среднеквадратическая ошибка:
|
2 |
~~~ |
1 |
Tc |
2 |
|
|
|
ε~u |
( t ) |
= tclim→∞ |
|
∫[u′(t) −u(t)] |
|
dt , |
|
T |
|
|||||
|
|
|
|
c |
0 |
|
|
и отношение сигнал-помеха на выходе демодулятора: |
|
|
|||||
|
|
|
ρвых = Рс.вых / Рп.вых , |
|
|
||
где волнистая черта – математическая операция усреднения во времени; |
|||||||
Tc - время передачи сигнала; |
|
|
|
|
|
||
u (t) −u(t) |
- отклонение принятого сигнала u (t) от переданного u(t) или помеха |
||||||
′ |
|
|
|
|
′ |
|
|
на выходе приемника; |
|
|
|
|
|
|
|
2 |
~~~ |
|
|
|
|
|
|
Рп.вых = ε~u |
( t ) - средняя мощность помехи на выходе приемника; |
||||||
Рс.вых - средняя мощность сигнала на выходе приемника.
При передаче дискретных первичных сигналов количественной мерой помехоустойчивости является вероятность ошибки:
Рош (ui ) = lim Nош ,
N →∞ N
где Nош - число ошибочно принятых первичных сигналов ui ; N - общее число переданных сигналов.
26.3Группы методов повышения ПУ систем связи
1)Повышение отношения сигнал-помеха на входе приемника. Этого можно до-
биться увеличением уровня сигнала или уменьшением уровня помех. Увеличение уровня передаваемого сигнала приводит к усложнению проблемы электромагнитной совместимости и взаимному влиянию в многоканальных системах, поэтому уровень передаваемого сигнала ограничивается. Увеличение уровня сигнала на входе приемника достигается уменьшением ослабления на пути его прохождения по направляющим системам, увеличением коэффициента усиления антенн, повышением КПД ввода в волноводы, световоды и др.
Уменьшение уровня помех производится подавлением помех в местах их возникновения и на путях проникновения ко входу приемника (экранирование, заземление, фильтрация и др.), уменьшением до допустимых норм взаимного влияния между цепями многопроводных линий (симметрирование, скрещивание, экранирование и др.), применением малошумящих усилителей и др.
2)Обработка сигналов в приемнике. Ее цель – выделить сигнал и подавить помехи. Наилучшие результаты обеспечивает оптимальная обработка. Однако все оптимальные способы технически сложны и на практике применяются квазиоптимальные.
3)выбор сигналов при заданных свойствах канала. При передаче дискретных сообщений осуществляется переход от ЧМн к ОФМн и многопозиционным сигналам, при передаче дискретных сообщений – от АМ к ОМ или ЧМ. Перспективны цифровые способы передачи непрерывных сигналов (например, ИКМ).
4)Разнесенный прием, при котором одно и то же сообщение передается по различным каналам связи с последующим автовыбором канала с лучшим отношением сигнал-помеха. Применяют разнесение по времени, частоте, фазе, поляризации, в пространстве.
75

5)Использование обратной связи (ОС). Применяется при передаче дискретных сигналов. В этом случае между источником и потребителем информации имеются как прямой, так и обратный каналы.
Различают системы с информационной (ИОС) и решающей (РОС) ОС.
При ИОС принятое сообщение по обратному каналу передается к источнику, где сравнивается с переданным сообщением. При выявлении ошибок и неточностей все сообщение передается снова.
При РОС ошибки выявляются на приеме (например, с помощью кодов, обнаруживающих ошибки). Далее формируется специальная команда, которая передается по обратному каналу. При получении этой команды источник повторяет передачи только ошибочно принятых символов сообщения.
Недостатками систем с ОС являются усложнение оборудования и увеличение времени передачи.
6)Применение корректирующих кодов. Хорошие коды являются сложными и технически трудно выполнимыми, поэтому используются в высококачественных системах связи (например, спутниковых).
27 ОПТИМАЛЬНЫЙ ПРИЕМ СИГНАЛОВ
27.1 Общие сведения
Сущность оптимального приема состоит в том, чтобы для выделения переданного сигнала использовать такие преобразования принимаемого колебания на выходе канала передачи, при которых обеспечивается наибольшая помехоустойчивость. Совокупность таких преобразований называют алгоритмом оптимального приема данного сигнала при передаче его по данному каналу.
В цифровых системах связи, как правило, применяется поэлементный прием. Поэлементный (посимвольный) прием – способ приема, при котором решение о переданном сигнале принимается отдельно для каждого сигнала, независимо от принятого ранее.
В теории приема сигналов пользуются различными критериями оптимальности. Критерий оптимальности приема – признак, на основании которого производится оценка обработки принятого сигнала как наилучшая. Его выбор зависит от условий работы.
При передаче дискретных сигналов широко используется критерий идеального наблюдателя (критерий котельникова). Согласно ему тот приемник считается оптимальным, который обеспечивает минимум полной вероятности ошибки. Записывается в виде:
min Pош .
Полная вероятность ошибки Pош вычисляется как математическое ожидание вероятности ошибки каждого из первичных сигналов Pош (ui ) :
m
Рош = М[Pош (ui )] = ∑P(ui )Pош (ui ) ,
i=1
где P(ui ) - вероятность передачи сигнала ui ;
m - общее число первичных сигналов.
На практике наиболее часто встречается случай передачи двоичных первичных сигналов сигналами, сформированными методами АМн, ЧМн и ФМн, в канале с аддитивным гауссовским шумом.
76
Аддитивная помеха – помеха, мгновенные значения которой складываются с мгновенными значениями сигнала. Гауссовский шум представляет собой стационарный эргодический случайный процесс с гауссовским (нормальным) распределением вероятности.
Таблица 27.1 – Алгоритмы оптимального приема при аддитивном гауссовском шуме.
Вид модуляции |
|
|
Алгоритм |
|
|
|||
АМн |
|
|
|
|
u1 |
|
|
|
|
|
ts |
|
|
> |
|
|
|
|
|
∫z(t)s1 (t)dt < Ws / 2 |
||||||
|
|
0 |
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
||
ЧМн |
|
|
|
u1 |
|
|
|
|
|
ts |
|
|
> |
ts |
|
|
|
|
∫ |
z(t)s |
(t)dt |
< |
∫ |
z(t)s |
2 |
(t)dt |
|
|
1 |
|
|
|
|
|
|
|
0 |
|
|
u2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
ФМн |
|
|
|
|
|
u1 |
|
|
|
|
ts |
z(t)s (t)dt > 0 |
|
||||
|
|
∫ |
|
1 |
|
< |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
|
Использованные в таблице обозначения: |
|
|
|
|
|
|
|
|
u1 ,u2 - двоичные первичные сигналы, соответствующие символам «1» и «0»;
s1 (t), s2 (t) - модулированные сигналы длительности ts с различными амплитудами (при АМн), частотами (при ЧМн) или фазами (при ФМн);
Ws = ∫0ts s12 (t)dt - энергия сигнала s1 (t) ;
z(t) = si (t) + n(t) - принятая сумма сигнала и помехи.
Приведенные алгоритмы можно реализовать двумя способами: на основе корреляторов, на основе согласованных фильтров.
Коррелятор (активный фильтр) – устройство, состоящее из трех блоков: перемножителя, генератора и интегратора - и используемое для вычисления скалярного
произведения сигналов ts∫z(t)si (t)dt . Используется в случае, когда сигналы имеют
0
сложную форму.
Поэтому приведенные на рисунке 27.1 схемы получили название оптимальных корреляционных приемников.
77
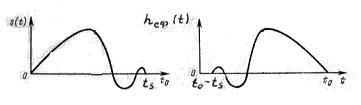
Рисунок 27.1 – Структурные схемы оптимальных когерентных приемников на корреляторах: а – АМн сигналов; б – ЧМн сигналов; в – ФМн сигналов. Используемые обозначения:
G1 ,G2 - генераторы опорных сигналов s1 (t), s2 (t) , форма которых повторяет форму
обнаруживаемых сигналов; × - перемножитель;
∫ - интегратор;
РУ - решающее устройство.
Схемы приемников сигналов с АМн и ФМн одноканальные (имеют одну ветвь обработки), с ЧМн – двухканальные (имеют две ветви обработки). В РУ результат интегрирования сравнивается с порогом, равным половине энергии сигнала s1 (t) для
АМн, и нулевым для ФМн либо результаты интегрирования сравниваются друг с другом для ЧМн. На выходе РУ формируются первичные сигналы в зависимости от знака неравенства.
Для работы генераторов, интеграторов и решающего устройства используются синхронизирующие тактовые импульсы, получаемые от специального устройства. Эти импульсы определяют начало и конец интервала интегрирования и момент вынесения решения о принятом сигнале.
Согласованный фильтр (СФ) – пассивный линейный фильтр с постоянными параметрами и импульсной характеристикой:
hСФ (t) = as(t0 −t) ,
где a - произвольный коэффициент пропорциональности;
s(t) - сигнал длительностью ts , по отношению к которому данный фильтр явля-
ется согласованным;
t0 ≥ ts - задержка в фильтре или момент отсчета.
Импульсная характеристика – реакция линейного четырехполюсника на воздействие в виде очень короткого прямоугольного импульса с достаточно большой амплитудой.
Импульсная характеристика согласованного с сигналом фильтра совпадает с зеркальным изображением этого сигнала, сдвинутым в положительном направлении по оси времени на длительность t0 .
Рисунок 27.2 – Сигнал и импульсная характеристика согласованного с ним фильтра при t0 > ts .
Форма сигнала на выходе СФ существенно отличается от формы сигнала на входе. Отношение сигнал-помеха на выходе СФ является максимально достижимым для линейных фильтров. СФ обеспечивает максимально возможное мгновенное значение сигнала на выходе в момент отсчета на сигнал, с которым он согласован. Оно численно равно энергии этого сигнала.
78
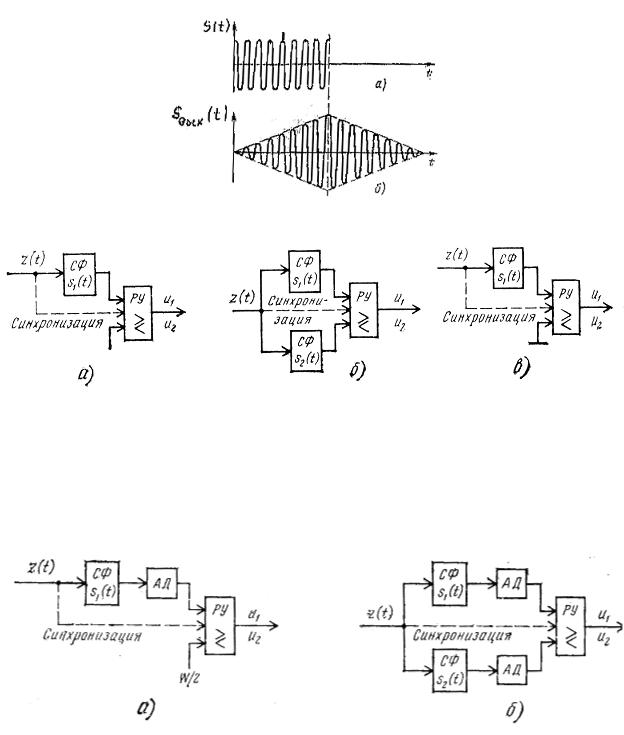
Рисунок 27.2 – Форма сигналов на входе и выходе СФ.
СФ в схемах приемников заменяют генераторы, перемножители и интеграторы.
Рисунок 27.3 – Структурные схемы оптимальных когерентных приемников на СФ: а – АМн сигналов; б - ЧМн сигналов; в – ФМн сигналов.
27.2 Некогерентный прием
Применяется в каналах с переменными параметрами (фаза меняется случайно) или при технических трудностях определения фазы с целью упрощения схем. Некогерентный прием нельзя осуществить для сигналов с ФМн, т.к. здесь передаваемая информация заложена в изменении фазы.
Рисунок 27.4 – Структурные схемы оптимальных некогерентных демодуляторов: а – АМн сигналов; б – ЧМн сигналов.
Решение в РУ о передаваемом сигнале принимается по значениям огибающей, для выделения которой в схему приемников после цепей обработки (СФ) включается амплитудный детектор АД.
27.3 Неоптимальный прием
На практике во многих случаях применяют более простые и надежные неоптимальные варианты приемного устройства ценой некоторой потери помехоустойчивости.
Структурная схема демодуляторов АМн и ЧМн сигналов в этом случае аналогична структурным схемам оптимальных некогерентных демодуляторов, но вместо СФ здесь применяют полосовые фильтры (ПФ) до детектора и манипуляционный ФНЧ после детектора.
79
ПФ додетекторной обработки ограничивает мощность помех на входе детектора. В зависимости от полярности напряжения на выходе ФНЧ в решающем устройстве РУ формируются выходные сигналы u1 или u2 .
При ФМн обязательно используется когерентный прием.
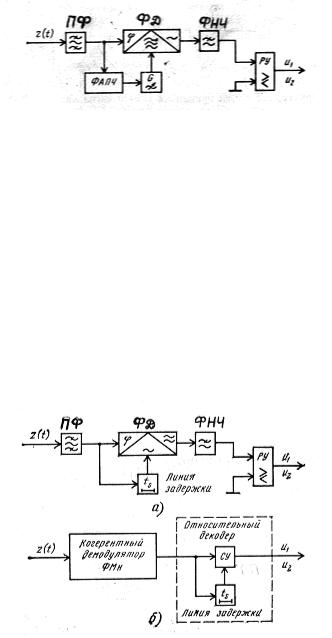
Рисунок 27.5 – Структурная схема неоптимального когерентного приемника ФМн сигналов.
ФД выполняет роль перемножителя, ФНЧ – интегратора. Опорный генератор G системой ФАПЧ подстраивается так, чтобы частота и фаза его колебаний совпадала с частотой и фазой одного из сигналов (например, s1 (t) ).
Приведенный приемник обладает существенным недостатком: использование для фазовой синхронизации принимаемого сигнала z(t) приводит к ОБРАТНОЙ
РАБОТЕ (выходной сигнал u1 заменяется на u2 и наоборот). Обратная работа воз-
никает, когда фаза колебаний генератора меняется на противоположную случайным образом в результате воздействия помех в канале.
Этот недостаток устранен в системах с ОФМн. Наибольшее распространение получили два метода приема ОФМн сигналов: метод сравнения фаз и метод сравнения полярностей (когерентный прием).
Рисунок 27.6 – Структурные схемы приемника ОФМн сигналов: а – по методу сравнения фаз; б – по методу сравнения полярностей.
Метод сравнения фаз обеспечивает когерентный прием. Система ФАПЧ и генератор G , дающие эффект обратной работы, заменены на линию задержки на время ts (ЛЗ). В ФД производится сравнение фаз принятого сигнала si (t) и опорного, в ка-
честве которого используется предыдущий принятый сигнал s j (t −ts ) . Выходные сигналы ui после ФД формируются в зависимости от полярности напряжения на вы-
ходе ФНЧ.
Метод сравнения полярностей обеспечивает когерентный прием. Принимаемый сигнал сначала обрабатывается когерентным демодулятором ФМН. На его выходе наблюдается обратная работа. Ее устраняет относительный декодер (схема сравнения полярностей), который состоит из ЛЗ и сравнивающего устройства (СУ)). В СУ
80