

2.1. Общий обзор системы.
Наиболее просто количественное рассмотрение нелинейных систем может проведено для двух типов систем, имеющих достаточно большой практический интерес: для систем, близких к консервативным (в первую очередь близких к синусоидальным), а также для систем, поддерживающих разрывные колебания. В данной работе изучается первый тип колебаний.
Мы будем рассматривать, в первую очередь, системы близкие к синусоидальным и достаточно близкие к консервативным.
![]() Уравнениегармонического
(синусоидального консервативного )
осциллятора имеет вид :
Уравнениегармонического
(синусоидального консервативного )
осциллятора имеет вид :
![]() Уравнение
системы, близкой к гармоническому
осциллятору имеет вид :
(1)
Уравнение
системы, близкой к гармоническому
осциллятору имеет вид :
(1)
где w – циклическая частота, x – зависимое переменное, - малый безразмерный параметр, который определяет близость нашей системы к консервативной линейной. Данное выражение является упрощением, суть которого заключается в том, что мы считаем функцию f , стоящую в левой части не зависящей от параметра . На практике данное обстоятельство выполняется с достаточно большой степенью точности, поэтому мы и вводим соответствующую идеализацию в нашу модель.
![]() Впрочем,
наше, неудобное для численного
интегрирования, уравнение второго
порядка может быть достаточно легко
сведено к системе из двух дифференциальных
уравнений первого порядка следующего
вида:
(2)
Впрочем,
наше, неудобное для численного
интегрирования, уравнение второго
порядка может быть достаточно легко
сведено к системе из двух дифференциальных
уравнений первого порядка следующего
вида:
(2)
![]() Здесь
- безразмерный положительный параметр,
который мы предполагаем достаточно
малым.
Будем также
считать, что f(x,y)
– полином,
а, точнее, наше уравнение имеет вид:
(3)
Здесь
- безразмерный положительный параметр,
который мы предполагаем достаточно
малым.
Будем также
считать, что f(x,y)
– полином,
а, точнее, наше уравнение имеет вид:
(3)
Очевидно, что наше уравнение Ван-дер-Поля – частный случай уравнения (1). Как видно, нелинейность нашего уравнения обуславливается наличием нелинейного множителя перед вторым слагаемым в левой части уравнения. В противном случае, наше уравнение совпадает с хорошо известным уравнением затухающих колебаний. Очевидно также, что близость системы к линейной (консервативной или неконсервативной) определяется параметрами : (величина, характеризующая диссипативные процессы в системе) и а (малый нелинейный параметр), которые мы и задаем в нашей программе как параметры.
Решение уравнения затухающих колебаний при небольших значениях хорошо известно, поэтому в процессе решения нелинейного уравнения полезно сравнивать его с соответствующим неконсервативным осциллятором. Его уравнение имеет вид : (4)
![]()
Решение данного уравнения : x(t)=A exp(-t) cos(wt+), где величины А и определяются из начальных условий. На фазовой плоскости данное решение отображается в виде семейства спиралей, имеющих асимптотическую точку в начале координат – рис1.
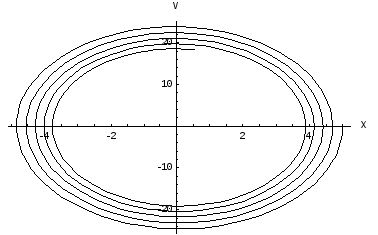
РИС 1.
X(0)=5,V(0)=0.
Однако помимо систем с нормальным положительным “трением” (0), мы можем также (хотя бы формально) рассматривать системы с отрицательным затуханием (0). Решение вновь получившегося уравнения будет иметь принципиально такой же вид, но только не с декрементом, а инкрементом затухания колебаний. Такая система, при анализе её с точки зрения линейного процесса, не будет иметь устойчивых стационарных состояний; она не может остаться в области, близкой к состоянию равновесия, - отклонения в линейной системе должны неизбежно возрастать – рис2.

РИС 2.
X(0)=5,V(0)=0.
С другой стороны, мы рассматривали нашу систему при определённых условиях на значения отклонения системы, при которых она не сильно отклоняется от положения равновесия – в противном случае, наше рассмотрение не является корректным. В то же время, наша система при любой наперед заданной ограниченной области такова, что фазовые траектории стремятся к уходу из этой области. Это значит, что линейная трактовка принципиально не может дать ответа на целый ряд вопросов о поведении системы (например, при прошествии достаточно большого количества времени). Это неизбежно приводит нас к вопросу о возможных нелинейных системах и процессах, аппроксимирующих данный линейный. Одним из таких обобщений и может быть система Ван-дер-Поля.
Метод Ван-дер-Поля.
Чтобы исследовать уравнения (3), можно воспользоваться следующим приближённым методом, часто называющимся методом Ван-дер-Поля. Суть его состоит в том, что мы рассматриваем другие, составленные особым образом уравнения. При этом мы подбираем эти уравнения таким образом, чтобы они своим решением аппроксимировали решения нелинейных уравнений (3). При этом, метод Ван-дер-Поля обладает тем важным свойством, что он учитывает специфику нелинейных систем, их характерные черты; вспомогательные уравнения также являются нелинейными, но значительно более простыми.
Пусть задана некоторая фазовая плоскость xy; возьмём на этой плоскости вращающуюся (w) по часовой стрелке прямоугольную систему координат ab. Очевидно, при =0, когда система обращается в простейший гармонический осциллятор, фазовые траектории превращаются в круги с центром в начале координат. Формулы преобразования от переменных x,y к переменным a,b будут иметь следующий вид : (5)
x = a cos t + b sin t, y = - a sin t + b cos t ;
В новых переменных уравнения (5) принимают вид : (6)
![]()
![]()
![]()
Или (7):
![]()
![]()
Развёртывая правые части в конечные ряды Фурье (считая a и b постоянными), получаем выражения для производных через коэффициенты Фурье. Ограничимся в разложении лишь первым членом, отбросив все остальные : (8)

![]() Также
как и система (3),
данная система является автономной,
то есть не
зависящей явным образом от времени, что
позволяет использовать её для решения
проблем на комплексной плоскости. Однако
она значительно проще системы Ван-дер-Поля
в её исходном виде, при этом при переходе
к полярным координатам переменные
разделяются. Обозначим: (9)
Также
как и система (3),
данная система является автономной,
то есть не
зависящей явным образом от времени, что
позволяет использовать её для решения
проблем на комплексной плоскости. Однако
она значительно проще системы Ван-дер-Поля
в её исходном виде, при этом при переходе
к полярным координатам переменные
разделяются. Обозначим: (9)
![]()
![]()
![]() В
таком случае получаем: (10)
В
таком случае получаем: (10)
![]() где
: (11)
где
: (11)
![]() В
таком виде наша система (3),
преобразованная к полярной системе
координат, представляется удобной для
исследования. Уравнения вполне можно
исследовать независимо друг от друга.
Начнём с первого из уравнений (10).
Качественная картина уравнений такого
типа полностью определяется расположением
и характером состояний равновесия на
соответствующей фазовой прямой.
В
таком виде наша система (3),
преобразованная к полярной системе
координат, представляется удобной для
исследования. Уравнения вполне можно
исследовать независимо друг от друга.
Начнём с первого из уравнений (10).
Качественная картина уравнений такого
типа полностью определяется расположением
и характером состояний равновесия на
соответствующей фазовой прямой.
Координаты этих состояний равновесия – корни уравнения :
Ф(К) = 0,
![]() Состояния
равновесия для i-го
К будет устойчивым, если:
Состояния
равновесия для i-го
К будет устойчивым, если:
![]() и неустойчивым,
если:
и неустойчивым,
если:
Остальные движения являются либо асимптотическими к состояниям равновесия как при t+, так и при t-, либо асимптотическими к состоянию равновесия для t+ и уходящими в бесконечность для t-.
Второе из уравнений (10) чаще всего ( в частности и в данном конкретном случае) встречается в модификации вида:
![]()
![]() В этом случае
второе уравнение интегрируется сразу:
В этом случае
второе уравнение интегрируется сразу:
![]()
Возвращаясь к обычной декартовой системе координат на фазовой плоскости с помощью формул преобразования координат, получим: (12)
![]()
![]()
Отсюда получаем, что рассматриваемый предельный цикл будет устойчив в своём орбитальном движении по фазовой плоскости в декартовой системе координат, если соответствующие состояния равновесия будут устойчивы, и наоборот. Остальные траектории, представляющие собой на плоскости a,b отрезки прямых, преобразуются на плоскости x,y в спирали, вообще говоря, накручивающиеся на предельные циклы либо при t+, либо при t-.
Реализация системы Ван-дер-Поля .
Важнейшим примером применения уравнения Ван-дер-Поля служит процесс автоколебаний в ламповом генераторе с колебательным контуром в цепи сетки. Под автоколебательной системой подразумевают первичный источник колебаний, работающий в режиме самовозбуждения.
Любой автогенератор представляет собой нелинейное устройство, преобразующее энергию питания в энергию колебаний. Независимо от вида и назначения, автогенератор должен иметь: источник питания, усилитель и устройство обратной связи, причём последняя должна быть положительной. Автогенератор, находящийся в стационарном режиме, представляет собой обычный нелинейный усилитель, для возбуждения которого используются колебания, вырабатываемые в самом генераторе; эти колебания берутся из колебательной системы усилителя и подаются на его вход по цепи обратной связи.
В момент запуска в колебательной системе автогенератора возникают свободные колебания, обусловленные включением источников питания, замыканием цепи, флуктуациями и некоторыми другими факторами. Благодаря обратной связи эти первоначальные колебания усиливаются, причём на первом этапе, пока амплитуды малы, усиление является практически линейным, и система может рассматриваться как линейная. Нарастание амплитуд прекращается, когда усиление снижается до уровня, при котором только компенсируется затухание колебаний в нагрузке.
![]() Рассмотрим
колебательный контур в режиме генерации
колебаний. На основании закона Кирхгофа
уравнение, определяющее силу тока в
колебательном контуре генерации, можно
записать следующим образом: (13)
Рассмотрим
колебательный контур в режиме генерации
колебаний. На основании закона Кирхгофа
уравнение, определяющее силу тока в
колебательном контуре генерации, можно
записать следующим образом: (13)
Пусть анодный ток зависит только от напряжения на сетке, а лампа имеет кубическую характеристику:
![]() Выражение
(13)
можно переписать в виде:
Выражение
(13)
можно переписать в виде:
![]() Вводя безразмерные
параметры, а также новую единицу времени
можно получить следующее выражение:
Вводя безразмерные
параметры, а также новую единицу времени
можно получить следующее выражение:
![]()
![]() Предположив,
что параметры – одного порядка малости
являются малыми по сравнению с единицей,
и вводя малый параметр,
мы (после переобозначения переменных
: =x,
d/dt=y)
приходим к следующей системе (14)
:
Предположив,
что параметры – одного порядка малости
являются малыми по сравнению с единицей,
и вводя малый параметр,
мы (после переобозначения переменных
: =x,
d/dt=y)
приходим к следующей системе (14)
:
![]() Очевидно,
что данное уравнение (считая =1,
а 3=a)
идентично нашему уравнению (3),
поскольку =0
(не только в случае симметричной нагрузки,
но и при небольших отклонениях от неё).
Очевидно,
что данное уравнение (считая =1,
а 3=a)
идентично нашему уравнению (3),
поскольку =0
(не только в случае симметричной нагрузки,
но и при небольших отклонениях от неё).
![]() Радиусы
предельных
циклов (в
нулевом приближении) на фазовой плоскости
даются уравнением: (15)
Радиусы
предельных
циклов (в
нулевом приближении) на фазовой плоскости
даются уравнением: (15)
![]() В
нашем случае первый из безразмерных
параметров равен 1, а это значит, что
уравнение имеет два принципиально
важных корня:
(16)
В
нашем случае первый из безразмерных
параметров равен 1, а это значит, что
уравнение имеет два принципиально
важных корня:
(16)
![]()
![]() Первый корень соответствует
неустойчивой особой точке, так как:
Первый корень соответствует
неустойчивой особой точке, так как:
Остальные траектории разбиваются на два типа: траектории, наматывающиеся снаружи на предельный цикл при t и уходящие в бесконечность при t, и на траектории, наматывающиеся изнутри на предельный цикл при t+, и стремящиеся к особой точке при t. Это – картина, характерная для простейшей автоколебательной системы, работающей в мягком режиме.
( В данной реализации рассматривался только «мягкий» режим работы автогенератора).
РЕАЛИЗАЦИЯ ЗАДАЧИ. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ.