

Моделирование систем / lec1
.pdfДля системы первичным является признак целостности, т. е. она рассматривается как единое целое, состоящее из взаимодействующих частей, часто разнокачественных, но одновременно совместимых
Эмерджентность. Эмерджентность предполагает наличие таких качеств (свойств), которые присущи системе в целом, но не свойственны ни одному из ее элементов в отдельности.
Наличие интегрированных качеств показывает, что свойства системы хотя и зависят от свойств элементов, но не определяются ими полностью. Отсюда можно сделать выводы:
1) система не сводится к простой совокупности элемен-
тов;
2) расчленяя систему на отдельные части, изучая каждую из них отдельности, нельзя познать все свойства системы в целом.
11
Классификация систем.
Существуют различные варианты классификации, отражающие различные аспекты их рассмотрения.
Часто одноуровневой классификации недостаточно, необходимо произвести разграничение внутри одного класса, что приводит к иерархическим классификациям.
12
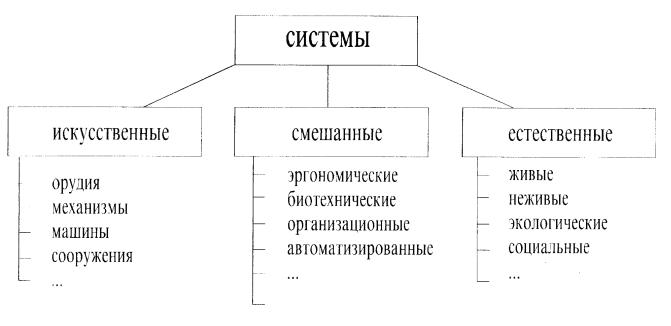
Классификация по происхождению
примеры подклассов:
эргономические (машина и человек - оператор);
организационные (коллективы людей);
биотехнические (живые организмы и технические устройства);
13
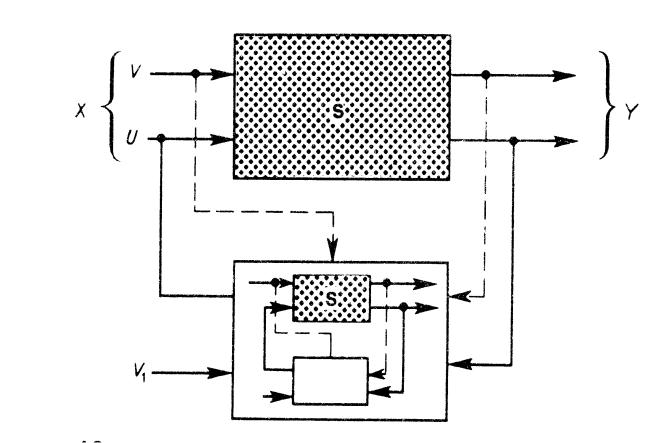
Варианты классификации в рамках общей схемы функционирования управляемой системы:
S - система подлежащая управлению .
Управляющая система вырабатывает управление U, для чего ей требуется модель всей ситуации (изображено в виде уменьшенной копии всей схемы внутри управляющей системы).
14
Возможные классификации по:
∙типу управления;
∙описанию входных и выходных процессов (переменных);
∙свойствам оператора системы;
∙обеспеченности управления ресурсами.
15

Типы способов управления.
16
Первый уровень классификации по признаку:
∙управляющий блок внутри системы
∙управляющий блок вне системы
∙управление, разделено: вне и внутри).
17
Второй уровень классификации
программное управление – траектория y*(t), ведущая систему к цели Y, известна точно
регулирование – по значениям y(t) - y*(t) определяется дополнительное к программному управление, которое возвращает систему на нужную траекторию.
параметрическая адаптация –прогнозируется поведение текущей траектории и подстраиваются параметры системы так, чтобы траектория попала в целевую область Y
структурная адаптация – управление траекторией для попадания в целевую область за счет изменения структуры системы
Если какая-то цель недостижима и при структурной адаптации, тогда необходим отказ от старой цели и задание новой - управление (адаптация) по целям.
18
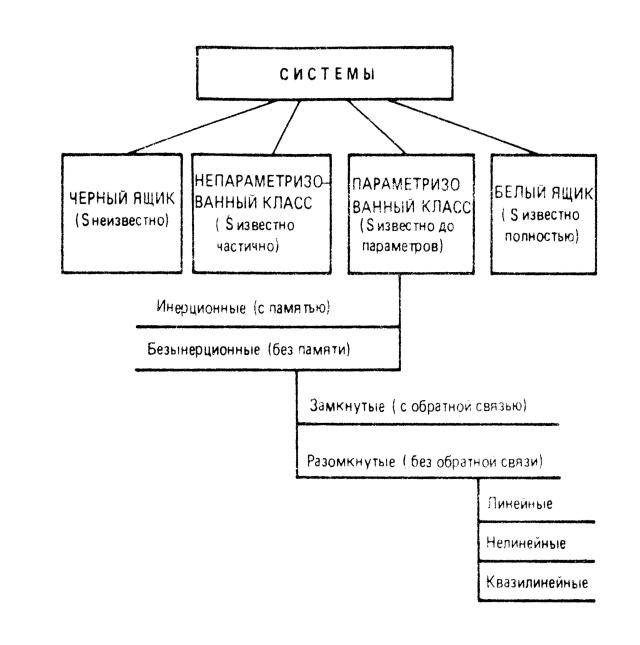
Типы операторов системы.
Оператор системы - это отображение, которое осуществляет система между входными и выходными переменными.
19
Первый уровень по степени известности оператора.
Непараметризованный класс,
об S известны только некие общие свойства (непрерывность, монотонность, симметричность, ...).
Параметризованный класс
известен вид S с точностью до параметров - коэффициентов.
20