

5.1598 Нм
Выбранный электродвигатель должен удовлетворять условиям:
Мэ < Мдн (14)
5.1598<8.12следовательно, условие (14) выполняется.
и
Мmax/Мдн<kм, (15)
где Мmax– максимальный момент сопротивления нагрузки, приведенный к валу двигателя
Мmax =J∑iεmax+ Мс max+ Мтр= 0.0215*174.5*0.5+4.1734+0.812=6.87(16)
kм- коэффициент перегрузки двигателя по пусковому моменту, который определяется из технических данных двигателя
kм=Мmaxдв/Mдндв. (17)
Значение kмприведено в табл. 1.kм=2
Мmax/Мдн= 0,85следовательно, условие (15) выполняется.
0,85следовательно, условие (15) выполняется.
0,85<2
В следящем электроприводе при выборе двигателя необходимо проверять его соответствие оптимальному передаточному числу редуктора, определяемому из условия минимума эквивалентного момента dMэ /di= 0:

(18)
 =
36,18
=
36,18
Поскольку фактическое
передаточное число редуктора, определяемое
по (5) i=174,5 , отличается
от оптимального числа =36,18более чем на 30%, то необходимо выбрать
другой двигатель такой же мощности, но
с иной номинальной угловой скоростью.
=36,18более чем на 30%, то необходимо выбрать
другой двигатель такой же мощности, но
с иной номинальной угловой скоростью.
В данном (учебном) проекте мы только констатируем факт необходимости выбора другого двигателя, дальнейшие же расчеты продолжим с выбранным двигателем.
Активное сопротивление якорной цепи двигателя необходимо принимать в нагретом состоянии
Rд =Rд 20оС (1 + αдΔtо)=0.234*(1+0.004*70)=0,299 Ом(19)
где αд =0.004 Ом/град - температурный коэффициент обмоток двигателя;
Δtо =tро-20о= 900-200=700С (tро- расчетная температура нагрева обмоток двигателя).
Индуктивность якорной (роторной) обмотки двигателя можно определить на основе его паспортных данных
Lд =TдRд (20)
или приближенно по формуле Линвиля – Уманского

(21)
где IЯН– номинальный ток якорной обмотки;
pn- число пар полюсов;
kК- коэффициент компенсации (при наличии компенсационной обмоткиkК= 0.25…0.3)
По формуле (21) при
kК= 0.25 получим: =0.0061 Гн
=0.0061 Гн
Выбор преобразователя
Выбор преобразователя производится из условий:
![]() (22)
(22)
и
![]() (23)
(23)
Из условий (22) и (23) получаем, что
110 И 14.2 а
Данные тиристорных преобразователей в таблице 2.

По условиям (22) и (23) из таблицы 2 выбираем тиристорный преобразователь ТПЕ-25/25-115.
Поскольку преобразователь не питается от 3-х фазной сети, соответствующей напряжению питания преобразователя, то применяем понижающий трансформатор.
Выбор трансформатора
При выборе трансформатора необходимо учитывать, что линейное напряжение вторичной обмотки его должно отвечать условию:
U2л≥Uвн (24)
(24)
где Uвн – номинальное выпрямленное напряжение ТП
Требуемая мощность
трансформатора для трехфазной мостовой
схемы:
(25)
По формуле (25)
получим: Ртр= =1660
Вт
=1660
Вт
Технические данные некоторых трансформаторов приведены в Таблице 3.
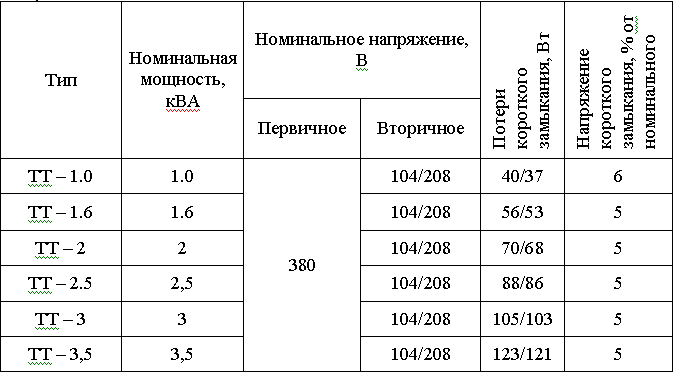
Из таблицы 3 выбираем по параметру РтртрансформаторТТ-2.
Определим
сопротивление фазы трансформатора.
Активную составляющую Rтрфпо потерям короткого замыкания ΔРк.
(26)
где I2н– номинальный фазный ток вторичной обмотки
I2н=Ртр/(3U2ф)= =5.8
А(27)
=5.8
А(27)
По формуле (26)
получим:
 =0.67 Ом
=0.67 Ом
Полное сопротивление
фазы можно определить из соотношения:
(28)
где ек– напряжение короткого замыкания трансформатора.
При расчетах с достаточной степенью точности можно принять U2ф=E2ф.
По формуле (28)
получим:
 =1,14 Ом
=1,14 Ом
Тогда реактивная
составляющая может быть определена из
соотношения:
(29)
По формуле (29)
получим:
 =0,92
Ом
=0,92
Ом
Индуктивность фазы трансформатора, приведенная ко вторичной обмотке

(30)
где f=50 Гц – частота питающей сети
По формуле (30)
получим:
 =0,0029
Гн
=0,0029
Гн
Далее определим индуктивность Lуп
Lуп=Lтр=2Lтр ф=2*0.0029=0,006 Гн(31)
и активное сопротивление Rупсиловой цепи преобразователя.
Rуп=Rтр+Rдт+Rк, = 1.34+0.024+0.2=1.564 Ом(32)
где Rтр=2Rтр ф=2*0.67=1.34 Ом(33)
Rдт – динамическое сопротивление тиристора;
Rк – коммутационное сопротивление выпрямительной схемы ТП.
Rдт=(0.2…0,3)Uтq/Iт= =0,024 Ом(34)
=0,024 Ом(34)
где Uт=(0,5…1) – падение напряжения на тиристоре;
Iт=Idн/3=25/3=8,33 А (35)– среднее значение тока тиристора;
Idн – номинальное значение среднего выпрямленного тока;
q – число одновременно проводящих тиристоров ( принятьq=2) .
Rк= тfLa =2*50*0.0029=0.3 Ом(36) – коммутационное сопротивление выпрямительной схемы,
где m=2– число пульсаций выпрямленного напряжения за период питающей сети;
La=Lтр ф=0.0029 Гн