

РГР / khazov
.doc
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ ТАТАРСТАН
АЛЬМЕТЬЕВСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ ИНСТИТУТ
Кафедра прикладной механики
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА № 1
по дисциплине: «Прикладная механика»
тема: «Кинематический и силовой анализ плоского механизма»
вариант 3-7
Выполнил: студент группы 32-61
Хазов Е.А
Проверил: Доцент каф.ПМ
Миндиярова Н.И.
Альметьевск, 2013
1. Структурный анализ механизмов
 1.1.
Определение
числа степеней свободы механизмов.
1.1.
Определение
числа степеней свободы механизмов.
Разделение механизма на структурные группы
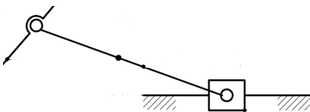
Задача 1
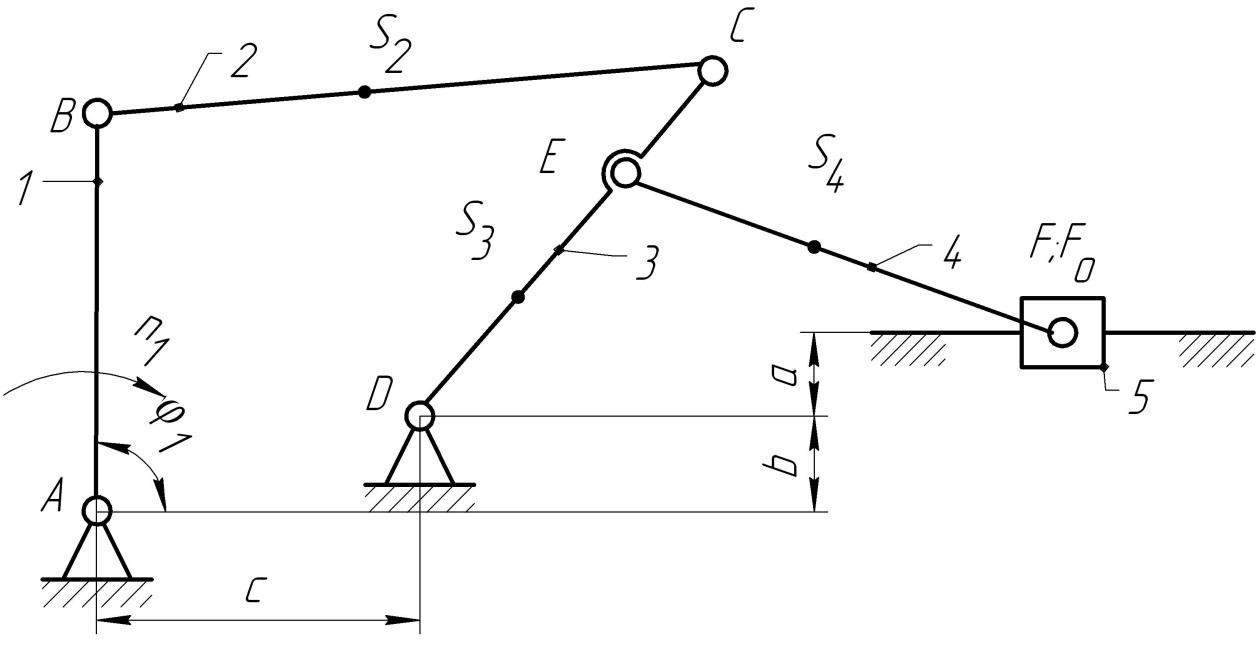
Произвести структурный анализ механизма.
Решение
Механизм имеет пять подвижных звеньев. Названия звеньев: 1 — кривошип; 2 —шатун; 3 — коромысло; 4 — шатун; 5 — ползун. Стойка принята за нулевое звено. Звенья соединены между собой семью кинематическими парами V класса (на схеме они обозначены буквами латинского алфавита).
Определяем подвижность механизма по формуле:
W = 3× n - 2 × p5 - p4 ,
где п = 5 — число подвижных звеньев; р5 = 7 — число кинематических пар V класса; р4 = 0— число кинематических пар IV класса. Тогда:
W 35 2 7 1.
Это значит, что в данном механизме должно быть одно входное звено. В качестве входного звена принято звено 1— кривошип.
Раскладываем механизм на структурные группы. Прежде всего, отсоединяем группу Ассура, состоящую из звеньев 4 и 5. Степень подвижности этой группы после присоединения к стойке:
W 3 n 2 p5 3 2 2 3 0.
Группа 4—5 является группой II класса II порядка.
Затем отсоединяем группу, состоящую из звеньев 2 и 3. Степень подвижности этой группы после присоединения к стойке:
W = 3 n - 2 p5 = 3 2 - 2 3 = 0.
Это группа II класса II порядка.
 После
отсоединения указанных групп остался
первичный механизм, состоящий из
кривошипа 1
и обладающий степенью подвижности :
После
отсоединения указанных групп остался
первичный механизм, состоящий из
кривошипа 1
и обладающий степенью подвижности :
W = 3× n - 2 × p5 = 3×1- 2 ×1 = 1.
В целом рассматриваемый механизм является механизмом II класса.
Формула строения механизма имеет вид:
ПМ (0;1)→ II (2;3) →II (4;5)

А Б В
Рис. 1 Разложение на группы Ассура
А) звено 1
Б) звенья 2 и 3
В) звенья 4 и 5
2. Кинематический анализ механизмов
 2.1.
Построение
планов положений,
скоростей
и ускорений
2.1.
Построение
планов положений,
скоростей
и ускорений
плоских механизмов
Задача 1
Построить план
положения механизма для заданного угла
поворота
![]() кривошипа при
кривошипа при
![]() =
0,45 м;
=
0,45 м;
![]() =
1,6 м;
=
1,6 м;
![]() = 1,3 м;
lED=0,9
м;
= 1,3 м;
lED=0,9
м;
![]() =
1,8 м;
a=
0,1 м;
b
= 0,2 м;
c=
1,2 м; угол
=
1,8 м;
a=
0,1 м;
b
= 0,2 м;
c=
1,2 м; угол
![]() =
240°.
=
240°.
Решение:
Для построения
плана принимаем, что длину кривошипа
![]() на схеме будет изображать отрезок AB,
длина которого равна 45 мм.
Тогда масштаб длин плана
на схеме будет изображать отрезок AB,
длина которого равна 45 мм.
Тогда масштаб длин плана
![]() м/мм
м/мм
Затем вычисляем длины остальных отрезков, которые будем откладывать на чертеже:
1)![]() мм;
мм;
2)![]() мм;
мм;
3)![]() мм;
мм;
4)![]() мм;
мм;
5)![]() мм;
мм;
6)![]() мм;
мм;
7)![]() мм
мм
Дополнительно заданы положения центров тяжести:
![]() м;
м;
![]() м;
м;
![]() м;
м;
Используя масштаб
длин
![]() , на
плане положений отмечаем центры тяжести:
, на
плане положений отмечаем центры тяжести:
1)![]() мм; 2)
мм; 2)![]() мм; 3)
мм; 3)![]() мм;
мм;
Задача 2
Определить
абсолютные и относительные скорости
точек звеньев и угловые скорости звеньев
механизма
методом планов
скоростей для положения его,
указанного в
задаче 1 (![]() =
240°). Кривошип
AB
имеет частоту
вращения n1
= 180
об/мин
в направлении
по часовой стрелке.
Размеры
звеньев— те
же.
=
240°). Кривошип
AB
имеет частоту
вращения n1
= 180
об/мин
в направлении
по часовой стрелке.
Размеры
звеньев— те
же.
Решение:
Определяем угловую скорость кривошипа AB по формуле:
![]() 1/с.
1/с.
Из теоретической механики известно, что скорость какой-либо точки звена может быть представлена в виде векторной суммы переносной и относительной скоростей. Тогда абсолютная скорость точки B кривошипа AB будет определяться:
![]()
где
![]() -переносная
скорость точки A;
-переносная
скорость точки A;
![]() - относительная скорость точки B во
вращении вокруг точки C.
- относительная скорость точки B во
вращении вокруг точки C.
Т. о., абсолютная скорость совпадает с относительной, поэтому скорость точки B находим по формуле:
![]() м/с.
м/с.
Вектор
![]() направлен перпендикулярно к оси звена
AB в сторону его вращения. Задаемся
длиной отрезка рb,
который будет изображать на плане
скорость
направлен перпендикулярно к оси звена
AB в сторону его вращения. Задаемся
длиной отрезка рb,
который будет изображать на плане
скорость
![]() , точки B; рb = 140 мм. Масштаб плана скоростей:
, точки B; рb = 140 мм. Масштаб плана скоростей:
![]()
![]() .
.
От произвольной точки р, принятой за полюс плана скоростей, откладываем перпендикулярно к звену AB отрезок рb.
Скорости неподвижных точек A и D равны нулю, поэтому векторы pa и pd также равны нулю и, следовательно, точки a и d на плане скоростей совпадают с полюсом р.
Для определения скорости точки C воспользуемся векторными уравнениями:
![]() ,
(1)
,
(1)
![]() (2)
(2)
где
![]() —
скорость точки B
в переносном
движении;
—
скорость точки B
в переносном
движении;
![]() — относительная
скорость точки C
во вращении
вокруг точки B;
— относительная
скорость точки C
во вращении
вокруг точки B;
![]() — скорость
точки D;
— скорость
точки D;
![]() —
относительная скорость точки C
во вращении
вокруг точки D.
—
относительная скорость точки C
во вращении
вокруг точки D.
В этих уравнениях
скорость
![]() известна
по величине и направлению, скорость
известна
по величине и направлению, скорость
![]() = 0.
Относительные скорости
= 0.
Относительные скорости
![]() и
и
![]() известны
лишь по линии действия:
известны
лишь по линии действия:
![]() перпендикулярна
к звену BC,
перпендикулярна
к звену BC,
![]() перпендикулярна
к звену DC.
Поэтому для
определения скорости
перпендикулярна
к звену DC.
Поэтому для
определения скорости
![]() точки C
через точку
b
(конец вектора скорости
точки C
через точку
b
(конец вектора скорости
![]() ) проводим
перпендикулярно звену BC
линию
действия скорости
) проводим
перпендикулярно звену BC
линию
действия скорости
![]() ,
а через
точку d,
совпадающую с полюсом р
плана
скоростей, проводим перпендикулярно
звену DC
линию
действия скорости
,
а через
точку d,
совпадающую с полюсом р
плана
скоростей, проводим перпендикулярно
звену DC
линию
действия скорости
![]() . На
пересечении этих двух линий действия
получим точку c
— конец
вектора скорости
. На
пересечении этих двух линий действия
получим точку c
— конец
вектора скорости
![]() точки C:
точки C:
![]() м/c
м/c
Направление
скорости
![]() определяется
направлением вектора.
определяется
направлением вектора.
Согласно уравнению
(1) вектор bc
изображает
относительную скорость
![]() точки C
во вращении
вокруг точки B:
точки C
во вращении
вокруг точки B:
![]() м/с.
м/с.
Согласно уравнению
(2) вектор dc
(pc)
изображает
относительную скорость
![]() точки C
во вращении
вокруг точки D:
точки C
во вращении
вокруг точки D:
![]() м/с
м/с
 Положение
точки e
определяем
на плане скоростей по теореме подобия
(третье свойство планов скоростей).
Определяем
длину отрезка be
из
пропорции:
Положение
точки e
определяем
на плане скоростей по теореме подобия
(третье свойство планов скоростей).
Определяем
длину отрезка be
из
пропорции:
![]()
Следовательно,
![]() мм.
мм.
Соединяем полюс
плана скоростей р
с точкой e
и определяем
величину скорости
![]() точки E:
точки E:
![]() м/с.
м/с.
Скорость точки F шатуна EF представляем в виде векторной суммы переносной и относительной скоростей. Для ее определения воспользуемся векторными уравнениями:
![]() ,
(3)
,
(3)
![]() (4)
(4)
где
![]() — скорость
точки E
в переносном
движении;
— скорость
точки E
в переносном
движении;
![]() — относительная
скорость точки F
во вращении
вокруг точки E;
— относительная
скорость точки F
во вращении
вокруг точки E;
![]() —
скорость точки F0,
принадлежащей стойке и совпадающей в
данный момент с точкой F
ползуна;
—
скорость точки F0,
принадлежащей стойке и совпадающей в
данный момент с точкой F
ползуна;
![]() —
скорость точки F
в поступательном
движении относительно точки F0.
—
скорость точки F
в поступательном
движении относительно точки F0.
В этих
уравнениях скорость
![]() известна
по величине и направлению, скорость
известна
по величине и направлению, скорость
![]() =
0. Относительные скорости
=
0. Относительные скорости
![]() и
и
![]() известны
лишь по линиям действия:
известны
лишь по линиям действия:
![]() перпендикулярна
к звену EF,
перпендикулярна
к звену EF,
![]() параллельна
оси направляющих ползуна. Для определения
скорости точки F
через
точку e
плана
скоростей проводим перпендикулярно
звену EF
линию
действия скорости
параллельна
оси направляющих ползуна. Для определения
скорости точки F
через
точку e
плана
скоростей проводим перпендикулярно
звену EF
линию
действия скорости
![]() ,
а
через точку f0,
совпадающую
с полюсом плана р
параллельно оси направляющих ползуна—
линию действия скорости
,
а
через точку f0,
совпадающую
с полюсом плана р
параллельно оси направляющих ползуна—
линию действия скорости
![]() .
Точка
f
пересечения
этих линий действия определяет конец
вектора скорости
.
Точка
f
пересечения
этих линий действия определяет конец
вектора скорости
![]() точки
F.
Величина
скорости:
точки
F.
Величина
скорости:
![]() м/с
м/с
Вектор ef определяет величину и направление скорости:
![]() м/с.
м/с.
Исходя из теоремы
подобия (третье свойство планов
скоростей) находим на плане точки s2,
s3,
s4,
соответствующие центрам тяжести звеньев
S2,
S3 и
S4.
Из полюса р
в эти точки
проводим векторы. Определяем величины
скоростей центров тяжести:
![]() м/с,
м/с,
![]() м/с,
м/с,
![]() м/с.
м/с.
Переходим к
определению угловых скоростей звеньев.
Угловая скорость ω1
ведущего
звена известна по величине и направлению
ω1
=
![]() 1/с и
это звено
вращается
по часовой стрелке).
1/с и
это звено
вращается
по часовой стрелке).
Чтобы определить угловую скорость ω2 звена BC, рассмотрим вращение точки C вокруг точки В.
 Направление
скорости
Направление
скорости
![]()
![]() точки C
во вращении
вокруг точки B
определяется
направлением вектора
точки C
во вращении
вокруг точки B
определяется
направлением вектора
![]() .
Мысленно
переносим этот вектор в точку C
механизма
и считаем точку B
как бы
неподвижной. Точка C
в направлении
вектора
.
Мысленно
переносим этот вектор в точку C
механизма
и считаем точку B
как бы
неподвижной. Точка C
в направлении
вектора
![]() вращается
относительно точки B
против
часовой стрелки, что и определяет
направление вращения звена BC.
Находим
величину угловой скорости второго
звена по формуле:
вращается
относительно точки B
против
часовой стрелки, что и определяет
направление вращения звена BC.
Находим
величину угловой скорости второго
звена по формуле:![]()
![]() 1/с.
1/с.
При определении
направления угловой скорости ω3
поступаем
аналогично. Перенесенный в точку C
звена DC
вектор
![]() показывает,
что точка C
вращается
относительно точки D
по часовой
стрелке. Это определяет направление
угловой скорости третьего звена:
показывает,
что точка C
вращается
относительно точки D
по часовой
стрелке. Это определяет направление
угловой скорости третьего звена:
![]() 1/с.
1/с.
Угловая скорость ползуна, совершающего прямолинейное поступательное движение, равна нулю.