

Древс Системы реалного времени технические и программные средства 2010
.pdfиндуктивностей: увеличение δ1 ведет к уменьшению L1, а уменьшение δ1 – к увеличению L2. Изменение индуктивностей плеч датчика
приводит к дисбалансу токов I1 и I2 , в результате чего через со-
противление нагрузки потечет ток Iн = Iвых, и появится выходное напряжение.
Если изменяется направление перемещения якоря, то фаза выходного напряжения сдвигается на 180° относительно напряжения питания, являющегося опорным.
Примерные технические параметры датчиков с дифференциальным включением индуктивностей: диапазон измерения – от 0,1 до 200 мм; чувствительность – от 10 до 100 мВ/мм; отклонение от линейности – от 0,5 до 2 % диапазона измерения.
Для получения реверсивной статической характеристики используют и мостовую схему включения индуктивных датчиков
(рис. 2.14).
Индуктивные датчики с переменным воздушным зазором применяются для измерения перемещений в диапазоне 0,1…1,0 мм. При больших перемещениях статическая характеристика датчика становится нелинейной. Для измерения больших перемещений (до 50 мм) применяют индуктивные датчики в виде катушки с подвижным внутренним сердеч-
ником. Если сердечник полностью введен внутрь катушки, на которую намотана обмотка, то ее индуктивное сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника из катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Индуктивные датчики в виде катушки с перемещающимся внутри нее сердечником получили название плунжерных датчиков.
41
2.8.3. Трансформаторные датчики
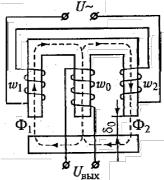
Схема трансформаторного датчика приведена на рис. 2.15. Обмотки цепи питания w1 и w2 одинаковы и включены таким образом, что, когда по ним протекает рабочий ток, создаваемые ими магнитные потоки Ф1 и Ф2 направлены встречно в центральном стержне, на котором расположена выходная обмот-
ка w0 [2].
|
В этом случае выходное напряже- |
|
ние |
|
Uвых = 4,44f w0 (Ф2 – Ф1), |
|
где f – частота питающего напряжения. |
|
Если считать ток в цепи питания |
|
постоянным, то магнитные потоки |
|
пропорциональны индуктивностям об- |
Рис. 2.15 |
моток w1 и w2: |
|
Ф1 = IL1/ w1, Ф2 = IL2/ w2. |
|
Так как в рассматриваемой конструкции преобразователя зазор остается постоянным, а якорь перемещается вдоль зазора, то значение индуктивности зависит от сечения магнитного сердечника, определяемого площадью перекрытия S стержней, которая изменяется при перемещении якоря [2].
В нейтральном положении при X = 0 площади перекрытия стержней равны: S1 = S2 = S0, что приводит к равенству потоков
Ф1 = Ф2 и, следовательно, Uвых = 0.
При перемещении якоря влево на расстояние X площадь перекрытия правого крайнего стержня изменится на S, и для потоков в крайних стержнях можно записать:
Ф1 = Iµ0w1S0/δ0,
Ф2 = Iµ0w2(S0 – S)/δ0.
Выходное напряжение датчика можно описать линейной зависимостью
Uвых = K S = K1 X,
так как площади перекрытия стержней пропорциональны перемещению якоря.
42
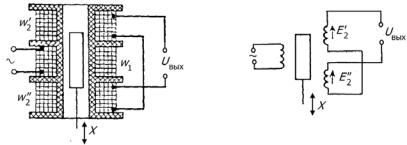
Модификацией рассмотренной схемы является дифференци- ально-трансформаторный датчик плунжерного типа, показанный на рис. 2.16, а. Это электромеханическое устройство, состоящее из первичной и двух совершенно одинаковых вторичных обмоток, расположенных симметрично относительно первичной на цилиндрическом каркасе [1]. Первичную обмотку питает синусоидальное напряжение. Свободно движущийся внутри обмоток магнитный сердечник в форме стержня обеспечивает связь этих обмоток через магнитный поток, а его перемещение х связано с измеряемым объектом.
а |
б |
Рис. 2.16
Схема включения обмоток показана на рис. 2.16, б. При возбуждении первичной обмотки с помощью внешнего источника напряжения U1 переменного тока (обычно с частотой от 50 до 25000 Гц) в двух вторичных обмотках наводятся ЭДС, определяемые взаимной индуктивностью контуров. Вторичные обмотки включены последовательно навстречу друг другу, так что индуцируемые в них напряжения для выходной цепи являются разнополярными. Поэтому результирующий выходной сигнал U0 равен нулю, когда сердечник находится в центральной позиции. При перемещении X максимальный сигнал формируется на той выходной обмотке, вблизи которой находится сердечник, и где, следовательно, выше взаимная индуктивность. Выходной сигнал дифференци- ально-трансформаторного датчика плунжерного типа – гармоническое колебание, амплитуда которого модулируется низкочастотным перемещением сердечника.
43
Порядок величин параметров дифференциального трансформатора следующий: линейные перемещения – от 1 до 500 мм; чувствительность – от 1 до 500 мВ/мм; отклонение от линейности – от 0,05 до 1% диапазона измерения; порог чувствительности – от 0,002 до 0,05% диапазона чувствительности, частоты возбуждения
– от 50 Гц до 30 кГц.
Похожий принцип используется в резольверах. Резольвер измеряет угловые перемещения и работает по принципу измерения взаимоиндукции между двумя обмотками. Ротор резольвера соединен с вращающимся объектом, и на его обмотку подается переменное напряжение U. Статор имеет две обмотки, повернутые на 90° друг относительно друга, с которых снимается выходное напряжение соответственно
U1 = KUsinφ,
U2 = kUcosφ,
где φ – угловое положение ротора.
Выход резольвера есть тригонометрическая функция угла. Эта нелинейность не всегда является недостатком: например, при управлении вращающими моментами робота требуются именно такие функции угла.
Резольвер дает хорошее разрешение и высокую точность, имеет высокий уровень сигнала и низкий выходной импеданс. Проблемы могут возникать только из-за щеток ротора (износ, дополнительные шумы и механические нагрузки).
К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести достаточно высокую выходную мощность; высокие чувствительность и разрешающую способность; сравнительную простоту конструкции; высокую надежность; малые массу и размеры при расчете на напряжение повышенной частоты; невысокую стоимость.
Недостатками рассмотренных измерительных преобразователей являются трудность регулировки и компенсации начального напряжения на их выходе; необходимость экранирования для уменьшения уровня помех; возможность работы только на переменном токе; ограниченность диапазона линейной статической характеристики.
44
2.8.4. Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Это датчики генераторного типа [1].
Принцип их действия основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием индукционных датчиков от индуктивных является то, что в них используется постоянное магнитное поле, а не переменное. Постоянное магнитное поле создается двумя способами: постоянными магнитами или катушкой, обтекаемой постоянным током.
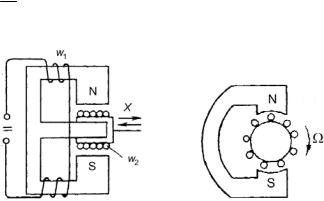
На рис. 2.17, а показана схема датчика с обмоткой w2, размещенной в воздушном зазоре, в котором постоянный магнитный поток Ф создается катушкой w1, включенной на постоянное напряжение U=. При перемещении катушки в магнитном поле в ней индуцируется ЭДС, пропорциональная скорости перемещения:
E = k Ф dxdt , где k – коэффициент пропорциональности, зависящий от числа витков w2 и конструктивных параметров датчика.
а |
б |
Рис. 2.17
45
На рис. 2.17, б показан датчик, в котором постоянный магнитный поток создается с помощью постоянного магнита с полюсными наконечниками. ЭДС, индуцируемая во вращающейся катушке, пропорциональна скорости вращения Ω: E = kФΩ.
В обоих этих датчиках катушки подвижны, поэтому для отвода от них выходного сигнала (ЭДС) необходимы гибкие токоподводы или контактные кольца.
2.8.5. Магнитоупругие датчики
Принцип действия магнитоупругих датчиков основан на магнитоупругом эффекте – физическом явлении, проявляющемся в виде изменения магнитной проницаемости ферромагнитного материала в зависимости от механических напряжений в нем. Магнитоупругие датчики используются для измерения силовых параметров: усилий, давлений, крутящих и изгибающих моментов, механических напряжений и т.п.
Конструктивно магнитоупругие датчики представляют магнитопровод с одной или несколькими обмотками. Магнитное сопротивление сердечника Rм = l/(sµ), где l и s – длина и площадь сечения сердечника. Если к сердечнику приложено механическое усилие F, то магнитная проницаемость µ изменится. Следовательно, изменятся и магнитное сопротивление сердечника, и индуктивность обмотки на сердечнике.
Зависимость магнитной проницаемости от механических напряжений имеет нелинейный характер. Однако при определенных значениях напряженности магнитного поля Н в сердечнике можно получить близкую к линейной зависимость изменения магнитной проницаемости µ сердечника от относительной деформации l/l или нормального механического напряжения σ в зоне линейных деформаций. Наиболее заметен магнитоупругий эффект в пермаллоевых (железокобальтовых и железоникелевых) сплавах.
К достоинствам магнитоупругих датчиков следует отнести высокую чувствительность и возможность измерения больших усилий (до нескольких тысяч тонн). В то же время магнитоупругие датчики имеют и серьезные недостатки: 1) наличие температурной
46

погрешности; 2) наличие погрешности, вызванной влиянием гистерезиса (как магнитного, так и механического, связанного с остаточной деформацией); 3) наличие погрешности, вызванной колебаниями напряжения питания.
2.9. Емкостные датчики
Принцип действия емкостных измерительных преобразователей основан на изменении емкости конденсатора под воздействием входной преобразуемой величины.
Емкостной датчик представляет собой плоский или цилиндрический конденсатор, одна из обкладок которого испытывает подвергаемое контролю перемещение, вызывая изменение емкости. Емкость С связана с толщиной диэлектрика d и его площадью S зависимостью C = εε0S/d, где ε – относительная диэлектрическая проницаемость; ε0 – диэлектрическая проницаемость вакуума. Из приведенного соотношения видно, что на емкость конденсатора можно влиять изменением площади перекрытия пластин S (рис. 2.18, а), расстояния между ними d (рис. 2.18, б), диэлектрической проницаемости ε вещества, находящегося в зазоре между обкладками конденсатора (рис. 2.18, в). Выбор того или иного измеряемого параметра зависит от характера измеряемой величины.
а |
б |
в |
Рис. 2.18
47
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми электродами, с диэлектриком между пластинами и без него.
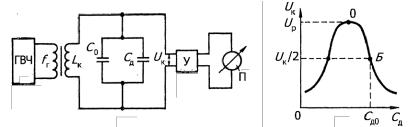
Для повышения чувствительности и линейности характеристик используют дифференциальные преобразователи, у которых изменение состояния контролируемой величины приводит к изменению емкости одновременно двух чувствительных элементов, включаемых в разные плечи мостовой измерительной схемы [1]. Более высокую чувствительность позволяет получить резонансная схема (рис. 2.19, а). Высокочастотный генератор ГВЧ имеет частоту напряжения fг и питает индуктивно связанный с ним контур, состоящий из индуктивности Lк, подстроечного конденсатора C0 и емкостного датчика Сд. Напряжение Uк, снимаемое с контура, усиливается усилителем У и измеряется прибором П, шкала которого может быть проградуирована в единицах измеряемой величины.
а |
б |
Рис. 2.19
При помощи подстроечного конденсатора контур настраивается на частоту f0, близкую (но не равную) к частоте генератора. Настройка производится при средней емкости датчика в диапазоне возможных изменений измеряемой величины (рис. 2.19, б)
Сд0 = (Смакс + Смин)/2,
в результате чего выходное напряжение примерно в два раза меньше напряжения при резонансе (точка А). Малейшее перемещение пластины конденсатора приводит к изменению Сд и, следовательно, к резкому изменению выходного напряжения.
48

Резонансная частота контура определяется из условия резонанса (равенства емкостного и индуктивного сопротивлений):
2πfL = 1/2πfC, |
fр = |
|
1 |
|
|
|
. |
|
2π L |
(С |
+С |
д |
) |
||||
|
|
|
||||||
|
|
к |
0 |
|
|
|
Емкостные датчики просты, прочны и надежны по конструкции. Диэлектриком обычно служит воздух, так что параметры конденсатора зависят только от геометрических характеристик и не зависят от свойств используемых материалов, если они правильно подобраны. Необходимо защищать датчик от тех факторов окружающей среды, которые могут ухудшить изоляцию между обкладками: от пыли, коррозии, влажности, ионизирующих излучений.
Датчики с изменяющимся зазором обладают большой чувствительностью, поэтому их используют для контроля очень малых перемещений (от 0 до 1 мм). Датчики с изменяющейся площадью электродов применяют для измерения перемещений, больших 1 мм. Емкостные датчики с изменяющейся диэлектрической проницаемостью применяют для контроля уровня, состава и концентрации жидких, а также толщины и влажности твердых диэлектриков и т.д.
К достоинствам емкостных измерительных преобразователей можно отнести простоту конструкцией, малые размеры и массу, высокую чувствительность, большую разрешающую способность при малом уровне входного сигнала, отсутствие подвижных токосъемных контактов, высокое быстродействие, возможность получения необходимого закона преобразования за счет выбора соответствующих конструктивных параметров, отсутствие влияния выходной цепи на измерительную.
Недостатки емкостных измерительных преобразователей состоят в относительно низком уровне выходной мощности сигналов, нестабильности характеристик при изменении параметров окружающей среды, влиянии паразитных емкостей.
2.10. Пьезоэлектрические датчики
Эти преобразователи используют явление пьезоэффекта, когда приложенная сила генерирует электрический заряд. Пьезоэффект обусловлен тем, что при деформации несимметричной кристалли-
49
ческой решетки происходит перераспределение зарядов, при котором положительные и отрицательные заряды смещаются к противоположным поверхностям кристалла. Плотность зарядов пропорциональна создаваемому механическому напряжению.
К классу пьезоэлектриков относятся как природные кристаллы (кварц, сегнетова соль), так и искусственные (титанат бария, твердые растворы цирконата-титаната свинца).
Свойства различных пьезоэлектрических материалов определяются относительно трехмерной системы координат. Вектор электрической поляризации (т.е. величина и знак пьезоэффекта) зависит от формы и ориентации кристалла преобразователя по отношению к полярной оси кристалла и расположения электродов, а также от знака деформации.
Связь между деформацией твердого тела и силой устанавливается (в определенных пределах упругой деформации) законом Гука, который для продольного растяжения (сжатия) имеет вид
l = Fl/ES, |
(2.1) |
где l – первоначальная длина, l – изменение длины при нагрузке F, E – модуль Юнга, S – площадь сечения. Перемещение преобразуется в силу упругим чувствительным элементом.
Соотношение (2.1) показывает, что пьезоэлектрический преобразователь удобно использовать для измерения силы и давления. Конструктивно пьезодатчик представляет упругий элемент, воздействующий на пластину пьезоэлектрика, помещенную между двумя металлическими обкладками. Поскольку пьезоэлектрический преобразователь по существу является диэлектриком с высоким сопротивлением утечки, в качестве его модели удобно рассматривать плоский конденсатор. Полный заряд, индуцированный в нем, прямо пропорционален приложенной силе F: q = dF, где d – пьезоэлектрический коэффициент, измеряемый в Кл/Н. Типичная амплитудно-частотная характеристика пьезоэлектрического преобразователя показана на рис. 2.20, где по оси абсцисс отложена частота внешнего воздействия (ωрез – резонансная частота), а по оси ординат – отношение выходного напряжения Uвых к деформирующей силе F.
50