

[ Филиппов ] Теория упругости (лекции)
.pdf11
где Eэф =1−Eν2 - эффективный модуль Юнга. Как будет показано ниже, эта
постоянная возникает при решении задачи о распространении волн в тонких пластинах. При запрещенных смещениях всех четырех боковых граней ( εy = 0 ; εz = 0 ), система уравнений для продольных и поперечных
деформаций примет вид:
εx = E1 σx − Eν σy − Eν σz ;
εy = E1 σy − Eν σx − Eν σz = 0;
εz = E1 σz − Eν σx − Eν σy = 0 ,
откуда следует σy + σz =12−ννσx и
|
|
|
ε |
x |
= |
1 |
σ |
x |
, |
|
|
|
|
′ |
|||||||
|
|
|
|
|
|
|
|
|||
|
|
|
E(1−ν) |
|
|
|
Eэф |
|
|
|
где величина |
′ |
|
также называется эффективным модулем |
|||||||
|
+ ν)(1− 2ν) |
|||||||||
Eэф = (1 |
||||||||||
Юнга. Как будет показано ниже, эта постоянная возникает при решении задачи о распространении волн в упругих непрерывных средах.
3.3. Деформация сдвига
Деформации сдвига возникают под действием касательных сил - сил, |
||
направленных вдоль поверхности упругого тела (рис. 3.3). |
|
|
Рассмотрим квадратный в сечении брусок, к боковым |
|
|
граням которого приложены касательные силы G, |
G |
|
равномерно распределенные по поверхностям граней. |
||
|
||
Сечение ABCD такого бруска и направления действия |
|
|
поверхностных сил представлены на рисунке 3.4. |
|
|
Чтобы брусок находился в равновесии, внешние воздействия на него должны удовлетворять следующим двум условиям:
1.Сумма сил, действующих на брусок, равна нулю.
2.Сумма моментов сил, действующих на брусок, равна нулю.
Рис. 3.3

12
Найдем изменения длин диагоналей AC и BD при сдвиговых деформациях бруска под действием приложенных касательных сил. Для этого используем уже изученные закономерности деформаций сжатия и растяжения тел.
Представим себе, что брусок с сечением ABCD является внутренней областью бруска квадратного сечения PQRT (рис. 3.5). Приложим к граням бруска PQRT силы
A
G
D
B
G
C
F =  2 G так, как это показано на рисунке 3.5.
2 G так, как это показано на рисунке 3.5.
При этом, длина бруска L, как легко показать,
останется неизменной, а на гранях внутреннего бруска возникнут касательные силы величиной G. Докажем это последнее утверждение.
Q
|
|
|
|
|
|
|
Q |
|
2 G |
G |
|
2 G |
2 |
G |
2 |
G |
|
|
2 |
|
2 |
|||||
|
|
|
|
|
|
|
G' |
|
|
A |
B |
|
|
A |
B |
|
|
P |
G |
G |
R |
|
|
|
Рис. 3.6 |
|
|
|
|
|
|
||||
|
D |
C |
|
|
|
|
|
|
2 G |
G |
|
2 G |
|
|
2 G |
2 G |
|
|
|
|
|
|
|
2 |
2 |
|
|
T |
|
|
|
|
|
G' |
|
|
Рис. 3.5 |
|
|
|
|
|
Рис. 3.7 |
|
13
Глядя на рисунок 3.5, мысленно выделим брусок треугольного сечения AQB и рассмотрим силы, действующие на его грани (рис. 3.6). Так как этот брусок находится в равновесии, векторная сумма действующих на него сил
должна быть равна нулю. Отсюда, учитывая условие AQB = π |
2 |
, из |
|
|
треугольника сил, изображенного на рисунке 3.7, находим:
|
′ |
|
2 |
|
|
2 |
|
2 |
|
|
2 |
12 |
|
G |
|
G |
+ |
G |
|
|
=G , |
||||||
|
= |
|
|
|
|
|
|
||||||
|
|
|
2 |
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.е. на грань AB треугольного бруска действует поверхностная сила, по абсолютной величине равная G . Очевидно, что на прилегающую грань AB бруска квадратного сечения ABCD должна действовать противоположно направленная поверхностная сила, по абсолютной величине также равная G , как и показано на рисунке 3.5.
Из рисунка 3.5 видно, что изменение длин отрезков AC и BD под действием сил, приложенных к боковым граням бруска PQRT, можно найти с использованием закона Гука и закона Пуассона. Обозначив S площадь боковой грани бруска с сечением ABCD, легко показать, что
площадь боковой грани бруска с сечением PQRT будет составлять  2 S . Отсюда следует:
2 S . Отсюда следует:
δ(AC)= − |
1 2G − |
ν 2G = − |
(1+ ν)G |
|||||||
E |
S |
|
||||||||
AC |
|
E |
2S |
E |
2S |
|
||||
|
|
|
|
|
|
|
|
(3.1) |
||
δ(BD) |
= |
1 2G |
+ |
ν 2G |
= |
(1+ ν)G |
||||
BD |
|
E 2S |
E 2S |
|
E |
S |
||||
Таким образом, деформация сдвига может быть представлена как деформация сжатия-растяжения, и это обстоятельство позволяет связать степень сдвиговых деформаций с величиной коэффициента Пуассона и модуля Юнга.
Рассмотрим сдвиговую деформацию бруска, показанного на рисунке 3.4, закрепив неподвижно его нижнюю грань
A B
θθ
D C
Рис. 3.8

|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
(рис. 3.8). Зная из уравнений (3.1), |
|
как |
|
|
|
|
|||||||||
меняются |
диагонали |
четырехугольника |
|
|
|
|
|||||||||
ABCD при сдвиговой деформации, найдем |
|
|
d' |
|
|||||||||||
величину угла θ, характеризующего |
|
|
|
||||||||||||
|
|
θ |
|
||||||||||||
отклонение боковых граней от вертикали. |
|
|
l |
||||||||||||
Обозначим l длину сторон ромба ABCD |
|
|
π/2 |
|
|||||||||||
|
|
|
|
||||||||||||
на рисунке 3.8: AB=BC=CD=DA=l, |
d |
- |
|
|
|
|
|||||||||
длину диагонали BD до деформации, и d' - |
|
|
l |
|
|||||||||||
длину |
этой |
же |
диагонали |
|
|
в |
|
|
|
|
|||||
деформированном бруске. До деформации |
|
|
Рис. 3.9 |
|
|||||||||||
сечение |
бруска |
представляло |
|
собой |
|
|
|
|
|||||||
квадрат, поэтому |
d 2 = 2l2 . |
Величину |
|
|
d′ |
|
|
|
|
||||||
можно найти из рисунка 3.9 с помощью теоремы косинуса: |
|
||||||||||||||
|
|
|
′ 2 |
|
2 |
|
2 |
|
|
2 |
π |
|
|
|
|
|
|
|
(d ) |
=l |
|
+l |
|
−2l |
|
cos |
2 |
+ θ |
. |
|
|
Преобразуем входящий в это выражение косинус с учетом малости угла θ:
|
cos π + θ =sin(−θ) |
≈ −θ, |
|
|
||||||
|
2 |
|
|
|
|
|
|
|||
откуда следует |
|
|
|
|
|
|
|
|
|
|
|
θ = |
(d′)2 − d 2 |
. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
d 2 |
|
|
|
|
|
|||
Обозначив δd = δ(BD), получаем d′ = d +δd , |
|
|
|
|
|
|||||
θ = |
(d′− d )(d′+ d ) |
≈ |
2d δd |
= 2 |
|
δd |
, |
|||
|
|
|
d |
|||||||
|
d 2 |
|
|
d 2 |
|
|
|
|
||
и с учетом (3.1) находим
θ = 21+Eν SG .
По аналогии с величиной σ - напряжением растяжения-сжатия, введем величину напряжения сдвига
15
g = GS ,
что позволяет записать формулу для угла θ в окончательном виде:
|
|
|
|
|
|
θ = |
1 |
g , |
|
|
|
|
|
|
µ |
||
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
где µ = |
|
- модуль сдвига. |
|
|
|
|||
2(1+ ν) |
|
|
|
|||||
Из условия 0 < ν < |
1 |
следует: |
E |
<µ < |
E . |
|||
|
|
|
2 |
|
3 |
|
2 |
|
Оценим изменения сечения, длины и объема бруска при сдвиговых деформациях. Как было отмечено выше, длина бруска L при сдвиговых деформациях остается постоянной, а изменение площади сечения есть величина второго порядка малости относительно изменения длины диагонали ромба ABCD:
δS = S′− S = 12 [(d + δd )(d −δd )− d 2 ]= 12 (δd )2 ≈ 0 .
Следовательно, изменение объема тела |
A |
B |
|
при сдвиговых деформациях является |
|
|
|
пренебрежимо малым: |
|
|
|
δV = LS′− LS ≈ 0 . |
|
|
|
Отметим в заключение, что сдвиговая |
|
|
|
деформация действительно является |
D |
C |
|
однородной: угол наклона боковых |
|||
|
|
||
граней относительно нижней у любого |
|
Рис. 3.8 |
|
внутреннего элемента бруска одинаков |
|
||
|
|
||
(рис. 3.10) и составляет θ. |
|
|
4. НЕОДНОРОДНЫЕ ДЕФОРМАЦИИ
Неоднородными называются такие деформации, при которых величина
ε = ∂∂ux не является постоянной по всему телу. Рассмотрим несколько примеров неоднородных деформаций.
16
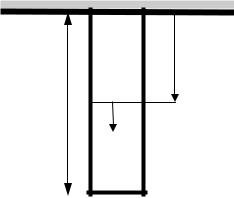
4.1.Деформация под действием массовых сил
Рассмотрим стержень длиной l, сечением S, модулем Юнга E и с однородной плотностью ρ. Стержень закреплен верхним концом (рис. 4.1). Найдем распределение напряжений в стержне и его полное удлинение. На расстоянии x от точки подвеса на площади сечения S действует сила F, равная весу нижней части стержня длиной (l-x):
Fx |
= M x |
g =ρVx |
g =ρS(l − x)g , |
(4.1) |
|
|
||
где |
M x |
и Vx - |
масса и объем нижней |
|
|
|||
части стержня. |
|
|
|
|
x |
|||
Пренебрегая |
малым |
изменением |
l |
|||||
|
||||||||
|
|
|||||||
сечения S, возникающим в соответствие |
|
F |
||||||
с формулой Пуассона, из (4.1) находим |
|
|||||||
напряжение на расстоянии x от точки |
|
|
||||||
подвеса: |
|
|
|
|
|
|
||
|
|
|
F =ρg(l − x) |
|
|
Рис. 4.1 |
||
|
|
σx = |
|
|
|
|||
|
|
|
S |
|
|
|
|
|
Удлинение стержня можно найти, используя дифференциальную форму закона Гука. Деформация равна относительному удлинению малого участка dx:
dudx = σEx = ρEg (l − x),
или
du = ρg (l − x)dx . |
(4.2) |
E |
|
Очевидно, что деформация неоднородная. |
|
Удлинение стержня δl равно величине u(x) при |
x =l , значение u(x) |
находим из (4.2) интегрированием с учетом граничного условия u(0) = 0:
x |
|
|
|
x |
ρg |
|
|
u(x) = ∫ρg |
(l − x)dx = |
ρg ∫(l − x)dx = |
(2xl − x2 ) , |
||||
2E |
|||||||
0 |
E |
|
E |
0 |
|
||
|
|
|
|
|
|||

17
откуда следует
δl =u(l) = ρgl2 . 2E
Полное относительное удлинение стержня:
ε = δll = 2ρEg l l .
Что будет происходить при увеличении длины стержня? Сила притяжения Земли (массовая сила) будет приводить к увеличению неоднородной
деформации подвешенного стержня. На участках, где деформация dudx
выше (вблизи точки подвеса) процессы разрушения начнутся в первую очередь. Можно ли так изменить форму, чтобы деформация стала
однородной? Чтобы выполнялось условие dudx = const , нужно, чтобы
напряжение было однородным по всей длине образца: σx = σ = const . Но сила меняется с изменением x, значит должно меняться и сечение стержня.
Найдем S(x), считая S(0) = S0. Сила в сечении S(x) определяется весом нижней части стержня:
Fx =ρVx g ,
где
Vx = ∫l S(x)dx .
x
Величина напряжения описывается выражением
|
F |
|
ρg |
l |
|
σ = |
x |
= |
|
∫S(x)dx , |
|
S(x) |
S(x) |
||||
|
|
x |
откуда следует
σS(x) =ρg∫l S(x)dx .
x
Дифференцируя обе части этого уравнения по x, находим:
18
S′(x) = −ρσg S(x).
Решением данного уравнения является экспоненциальная функция. С учетом начального условия S(0)=S0 получаем:
S(x) = S0 exp(−ρσg x) .
Для получения однородной деформации тело должно экспоненциально
сужаться в направлении вниз от закрепленного конца. Поскольку
напряжение не зависит от x, полная деформация будет описываться выражением δll = Eσ , как и в случае растяжения однородного стержня.
Лекция 3
4.2.Деформация кручения
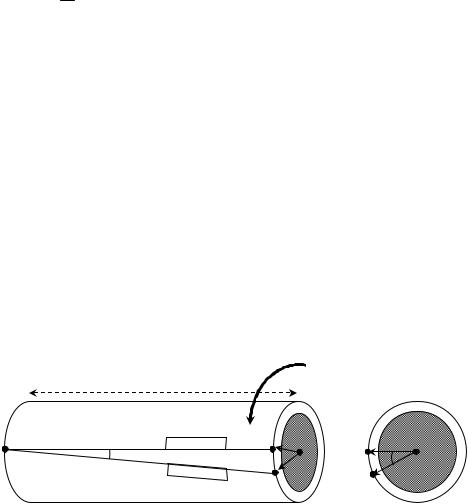
4.2.1. Кручение тонкостенного цилиндра
Рассмотрим тонкостенный цилиндр длиной L, радиуса r и толщиной dr. Закрепим один из его концов, а к другому приложим крутящий момент M, как показано на рисунке 4.5. Сдвиговое напряжение g, создающее
крутильный момент и приложенное к свободному торцу цилиндра, будем
считать постоянным. Образующая AB цилиндра после деформации кручения отклонится на малый угол ϑ, а радиус-вектор, направленный от оси цилиндра в точку B, повернется на угол ϕ (см. рис 4.5).
|
L |
M |
|
|
|
|
|
|
|
ϑ |
K |
B r |
B |
r |
|
||||
A |
|
|
ϕ |
|
|
K' |
B' |
B' |
|
|
|
Рис. 4.5
Угол ϑ можно выразить через длину дуги BB' и длину цилиндра L:
19 |
|
|
|
||
ϑ= |
BB′ |
, |
|
||
|
L |
|
|||
|
|
|
|
||
где |
|
|
|||
BB′ = rϕ, |
|
||||
откуда |
|
|
|||
ϑ= |
r |
ϕ. |
(4.3) |
||
|
|||||
|
|
L |
|
|
|
Найдем связь между крутильным моментом M, углом поворота ϕ цилиндра и упругими свойствами материала. Выделим на поверхности цилиндра малый элемент K, имеющий форму параллелепипеда (рис. 4.5). В результате деформации кручения выбранный нами элемент сместится и испытает перекос (рис. 4.6), который можно рассматривать как
деформацию сдвига. Применяя формулы, полученные для описания
деформации сдвига, находим:
ϑ= µg .
Учитывая соотношение (4.3), получаем |
|
До деформации кручения |
||||||
|
|
|
||||||
|
g |
|
r |
|
|
|
K |
|
|
|
|
|
|
||||
|
|
= |
|
ϕ, |
|
|
|
|
µ |
L |
|
|
|
ϑ |
|||
|
|
|
|
|
||||
откуда следует |
|
|
|
|
|
|
||
|
|
µr |
|
|
|
|
||
|
|
|
|
|
|
|
K' |
|
|
|
g = L ϕ. |
(4.4) |
|
|
|||
|
|
После деформации кручения |
||||||
Эту зависимость мы нашли, используя |
|
Рис. 4.6 |
||||||
формулы для деформации однородного |
|
|
|
|||||
сдвига.
Свяжем величину поверхностного напряжения g c крутильным моментом
M. Из рисунка 4.7 находим
dM = dG r ,
где dG = gdl dr , откуда получаем
dM = grdl dr . |
dl |
r |
dr |
|
|||
Интегрируя по длине окружности радиуса r, |
dG |
|
|
приходим к соотношению |
|
|
|
|
|
Рис. 4.7 |
|

20
2πr
M = grdr ∫dl = 2πr2 gdr .
0
Используя формулу (4.4), находим
M = 2πr3µϕdr .
L
Это выражение позволяет вычислить зависимость M от ϕ для
толстостенной трубки и для сплошного цилиндра.
4.2.2. Толстостенная трубка
Рассмотрим толстостенную трубку с внутренним радиусом r1 и внешним радиусом r2. Представим, что эта трубка является набором тонкостенных трубок толщиной dx, тогда момент сил находится интегрированием:
r |
2πµϕ |
|
|
|
2πµϕ |
r |
|
|||
M = ∫2 |
r3dr = |
∫2 |
r3dr . |
|||||||
|
|
|||||||||
r |
|
L |
|
|
|
L |
r |
|
||
1 |
|
|
|
|
|
|
|
1 |
|
|
Поскольку |
r2 |
|
|
|
|
|
|
|
|
|
|
r3dr |
|
1(r4 |
− r4 ), |
|
|
||||
|
∫ |
= |
|
|
||||||
|
|
|
4 |
2 |
1 |
|
|
|
||
|
r1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
для момента сил получаем
M = fϕ,
где f = πµ2L (r24 − r14 ) - крутильная жесткость трубки.
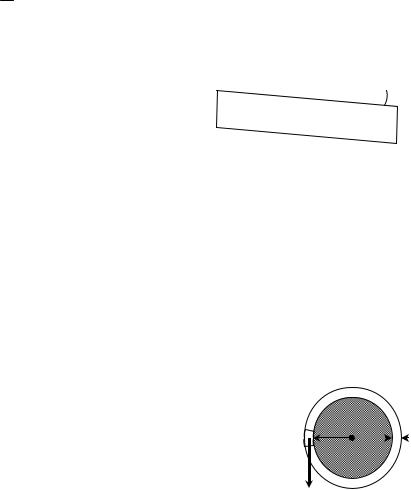
4.2.3. Сплошной цилиндр
Сплошной цилиндр радиуса R можно рассматривать как частный случай толстостенной трубки при r1 = 0 и r2 = R, откуда следует
M = fϕ; f = |
πµR4 |
. |
|
2L |
|||
|
|
Отметим, что жесткость стержня пропорциональна µR4 и обратно пропорциональна его длине L.
4.2.4. Кручение как неоднородная деформация
Мысленно выделим в стержне две тонкие трубки радиусами r1 < r2 . Поскольку для соответствующих углов справедливы соотношения