

Березкин Основы теории информации и кодирования Лабораторный практикум 2009
.pdf12. Какими показателями можно оценивать качество корректирующих кодов?
Лабораторная работа 8
ПОСТРОЕНИЕ КОДИРУЮЩИХ И ДЕКОДИРУЮЩИХ УСТРОЙСТВ ЦИКЛИЧЕСКОГО КОДА ХЭММИНГА
Цель: изучение и исследование принципов построения структур многоканальных кодеров и декодеров циклического кода Хэмминга, исправляющего однократные ошибки.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Для кодирования и декодирования циклических кодов применяются многотактные линейные схемы, называемые часто фильтрами или сдвигающими регистрами с обратными связями. Основными компонентами этих схем являются элемент задержки на один такт и сумматор по модулю 2.
Структура фильтра описывается матрицей связей между его элементами
M = 
 m ij
m ij 
 , i , j = 1, r ,
, i , j = 1, r ,
где r – количество элементов задержки в фильтре, а m ij = 1 , если выход j -го элемента задержки связан со входом i -го элемента задержки, в противном случае mij = 0 .
Вектор-столбцам матрицы M поставим в соответствие полиномы
r
μj (x) = ∑mij xi−1 , j =1, r .
i=1
Тогда матрицу M можно записать в виде
M = μ1 (x),μ2 (x),...,μr (x) .
Полиномы μ j (x) выберем таким образом, чтобы
71
μ1 ( x) ≡ g1 + g 2 x + ... + g r x r −1 |
≡ x −1 , |
|
|
|
|
|||||||||||||
μ2 ( x) ≡ xμ1 ( x) ≡ 1 , |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
μ3 ( x) ≡ x 2μ1 ( x) ≡ x , |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
mod g ( x) , |
||||||||||||||
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μr ( x) ≡ x |
r −1 |
μ1 ( x) |
≡ x |
r −2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
где g(x) =1+ g1 x + g2 x2 +...+ gr xr – |
порождающий многочлен. |
|||||||||||||||||
Тогда схема, описываемая матрицей связей |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
g 1 |
|
1 |
0 ... |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
g 2 |
|
0 |
1 ... |
0 |
|
|
M = |
|
x −1 ,1, x ,..., x r − 2 |
|
= |
|
|
|
... |
|
|
, |
|||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
g r −1 |
0 |
0 ... |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g r |
|
0 |
0 ... |
0 |
|
|
позволяет выполнять деление на полином g(x) . |
|
|
|
|
||||||||||||||
Действительно, |
|
если |
исходному |
состоянию |
фильтра |
|||||||||||||
Ω(0) = (ω , ω |
2 |
,..., ω |
r |
) |
поставить |
в |
соответствие |
полином |
||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ω( 0) ( x) = ω1 + ω2 x + ... + ωr x r −1 , то состояние фильтра в следующем такте (на вход схемы информация не поступает) равно
Ω(1) ( x) ≡ Ω( 0 ) M t = ω1 x −1 + ω2 + ω3 x + ... + ωr x r −2 ≡
≡ (ω1 + ω2 x + ... + ωr x r −1 ) x −1 = Ω( 0 ) ( x) x −1 mod g ( x),
где M t – транспонированная матрица связей.
Входную цепь фильтра построим таким образом, чтобы
Ω( i ) ( x ) ≡ [Ω( i −1) ( x ) + si −1 ]x −1 mod g ( x ) ,
т.е. последующее состояние вычисляется прибавлением входного символа к содержимому фильтра и однократным сдвигом его содержимого.
Если начальное состояние Ω(0) (x) = 0 и на вход фильтра поступает последовательность символов s0 , s1 ,..., sn −1 , а эта по-
72
следовательность соответствует коэффициентам произвольного полинома степени n −1: S(x) = s0 + s1 x +... + sn−1 xn−1 , то фильтр будет последовательно принимать состояния
Ω(1) (x) ≡ s0 x−1, |
|
|
|
|
|
|
|
|
|
|||||
Ω(2) (x) |
≡ (s x−1 |
+ s )x−1 = s x−2 + s x−1 |
|
|
|
|||||||||
, |
|
|
||||||||||||
|
|
|
|
0 |
1 |
|
0 |
|
|
1 |
mod g(x) . |
|
||
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
Ω(n) (x) |
≡ s |
0 |
x−n |
+ s x−(n−1) |
+...+ s |
n−1 |
xn−1 |
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
Следовательно, Ω( n) (x) ≡ s |
0 |
+ s x + ... + s |
n−1 |
x n−1 mod g(x) |
, |
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
так как xn |
≡1mod g(x) . |
|
|
|
|
|
|
|
|
|
||||
После |
поступления последнего |
символа |
|
sn−1 содержимое |
||||||||||
фильтра будет равно остатку от деления полинома S(x) на g(x) . |
|
|||||||||||||
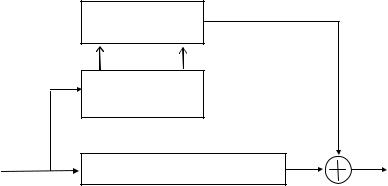
Структура рассмотренного фильтра, описываемого матрицей связи, приведена на рис. 8.1, которая может быть использована для вычисления контрольных разрядов разделимого циклического кода.
Кодер работает следующим образом. Сначала ключ находится в 1-м положении, и информационные разряды поступают на вход фильтра, который вначале находится в нулевом состоянии, и непосредственно в линию связи. Затем ключ переключается во 2-е положение. В этом случае обратная связь в фильтре размыкается и контрольные разряды последовательно "выдвигаются" в линию. Таким образом, к концу передачи кодового слова фильтр оказывается в нулевом состоянии.
Формально работа кодера описывается следующим образом. После поступления k информационных символов содержимое фильтра равно
Ω(k ) (x) ≡ s |
0 |
x−k + s x−k +1 +... + s |
k −1 |
x−1 ≡ |
||||
|
|
|
1 |
|
|
|
||
≡ x−k (s |
0 |
+ s x +... + s |
k −1 |
xk −1 ) ≡ x−k |
S(x) ≡ xn−k S(x) mod g(x), |
|||
|
|
1 |
|
|
|
|||
которое совпадает с контрольным вектором.
73
Рассмотренные одноканальные кодеры применяются в системах последовательного действия, где передача символов осуществляется последовательно во времени. В ряде устройств современных управляющих систем используется параллельно-последовательный принцип передачи информации. При параллельнопоследовательной передаче информационное слово разбивается на части длиной ν разрядов, эти ν -разрядные части передаются
последовательно. В этом случае необходимо уметь строить линейные фильтры (кодеры), содержащие ν входов и ν выходов.
Последовательные состояния и значения выхода рассмотренных одноканальных линейных фильтров описываются матричными уравнениями
Ω(i) = Ω(i−1) Mt +si F ,
yi = Ω( i−1) B + si Ψ ,
где Ω( i ) = (ω1(i ) ,..., ω(ri ) ) – вектор состояния фильтра в момент времени (i) ; Mt – транспонированная матрица связей; si ( yi ) – значение входного (выходного) символа в момент времени (i) ; F – матрица связей (1×r) между входом и элементами задержки фильтра; B – матрица связей (r ×1) между элементами задержки и выходом фильтра; Ψ – матрица связей (1×1) между входом и выходом фильтра.
Если известны Mt , F, B и Ψ , то соответствующие уравнения
для ν -канального аналога фильтра, содержащего ν входов и ν выходов, имеют следующий вид (известный результат из математического аппарата линейных последовательностных машин):
Ω( i) = Ω(i−1) Mtν + S(i) F ,
Y(i) = Ω(i−1) B + S(i) Ψ ,
где S (i) = (s1(i) ,..., sν(i) ) – входной вектор в момент времени (i) ; Y (i) = ( y1(i) ,..., yν(i) ) – выходной вектор в момент времени (i) ;
74
B = |
B |
Mt B |
... Mtν −1 B |
|
– матрица связей |
( r × ν ) |
между |
|||||
элементами задержки и ν выходами фильтра; |
|
|
||||||||||
|
|
|
F Mtν−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F = |
|
F M ν−2 |
– матрица связей ( ν×r ) между входами фильтра |
|||||||||
|
|
t |
||||||||||
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
и элементами задержки; |
|
|
|
|
|
|
|
|||||
|
|
Ψ |
F B |
F Mt B ... |
F Mtν−2 B |
|
|
|
|
|||
|
|
|
|
|
||||||||
|
0 |
Ψ |
F B ... |
F Mtν−3 B |
|
– |
матрица |
связей |
||||
Ψ = |
|
|
|
|
... |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
0 |
0 |
... |
Ψ |
|
|
|
|
||
(ν × ν) между входами фильтра и его выходами. |
|
|
||||||||||
В |
качестве |
примера |
рассмотрим построение |
одноканального |
||||||||
(ν =1) и двухканального кодера (ν = 2) для разделимого цикличе-
ского кода (7,4), порождаемого многочленом g(x) =1 + x2 + x3 . Структура одноканального кодера задается матрицами
M = |
0 |
1 |
0 |
, Mt = |
0 |
1 |
1 |
|
1 |
0 |
1 |
1 |
0 |
0 |
, |
||
|
1 |
0 |
0 |
|
0 |
1 |
0 |
|
|
1 |
|
|
|
|
|
||||||||
F = |
|
g1 g2 ... gr |
|
= |
|
0 1 1 |
|
, B = |
0 |
, Ψ = |
|
1 |
|
. |
|
|
|
|
|
|
|||||||||
|
0 |
|
|
|
|
|
||||||||
и имеет вид, представленный на рис. 8.1. |
|
|
|
|
|
|||||||||
При известных схемотехнических решениях матрицы B(B ) и Ψ(Ψ* ) , в принципе, можно и не строить. В большей степени они
приводятся лишь для того, чтобы сохранить общую полноту картины построения ν-канального аналога одноканальной линейной последовательностной машины.
75


 D1
D1 
 D2
D2 

 D3
D3
Выход 2

 Вход
Вход
1
Рис. 8.1. Структура одноканального кодера
Матричное описание двухканального аналога имеет вид
Mt2 = |
0 |
|
1 |
|
1 |
|
|
0 |
1 |
1 |
= |
1 |
1 |
0 |
|
, F = |
|
F Mt |
|
= |
|
1 1 0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
1 |
0 |
0 |
|
|
1 0 0 |
0 |
1 |
1 |
|
|
|
|
, |
||||||||||||||||||||||
|
0 |
|
1 |
|
0 |
|
|
0 |
1 |
0 |
|
1 |
0 |
0 |
|
|
|
|
|
|
F |
|
|
|
0 1 1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
M 2 = |
|
1 |
0 |
1 |
|
, F Mt = |
|
|
|
|
|
0 |
1 |
1 |
|
= |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
1 1 0 |
|
|
0 |
1 1 |
|
|
|
1 |
0 |
0 |
|
|
1 1 0 |
|
, |
|
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
||||||
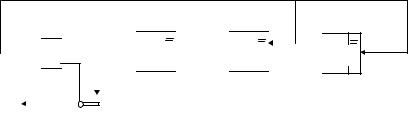
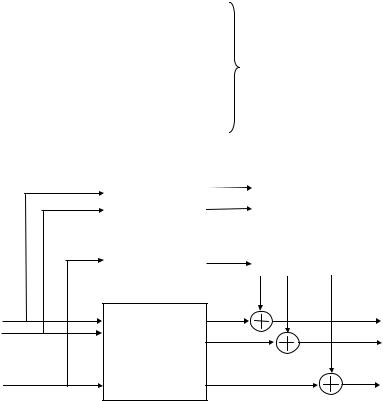
аего структура представлена на рис. 8.2.
Врассмотренном примере количество информационных разря-
дов k кратно ν. В общем случае это условие не выполняется и
|
k |
|
||
после выполнения |
z = |
|
|
тактов (квадратные скобки означают |
|
||||
|
|
ν |
|
|
ближайшее целое большее число), содержимое ν-канального кодера будет равно: R (x) = R(x) x−(zν−k ) mod g(x) , где R(x) соответствует контрольному коду. Поэтому требуется коррекция содержимого фильтра, если (z ν − k) ≠ 0 . Однако коррекции мож-
но избежать, если полином S ( x) , соответствующий информаци-
онным разрядам, умножить на x( zν−k ) . |
В этом |
случае |
R (x) ≡ R(x) x−( z ν−k ) x( z ν−k ) ≡ R(x) mod g(x) . |
Известно, |
что ум- |
ножение равносильно операции сдвига. Реализация сдвига заключается в том, что перед младшим информационным разрядом s0
76
приписывается (z ν −k) фиктивных нулей. При этом разряд |
s0 |
|||||||||||||||||||||
поступает на |
(z ν−k) +1 вход (канал) |
кодера, разряд s1 – |
на |
|||||||||||||||||||
[(z ν−k) +2]-й канал и т.д. |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D3 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выход 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Вход 1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 =
=  D2
D2
Выход 2
 Вход 2
Вход 2
Рис. 8.2. Структура двухканального кодера
Блок-схема одноканального декодирующего устройства представлена на рис. 8.3.
Коэффициенты s0 , s1 ,..., sn−1 полинома S(x) последовательно
поступают на вход буферного ЗУ и одновременно на вход многотактного фильтра, с помощью которого S(x) делится на g(x) . Если
ошибка отсутствует, то после поступления sn−1 содержимое фильтра будет равно нулю. Получение ненулевого результата свидетельствует о наличии обнаруживаемой ошибки E(x) = xie(x) .
Если продолжить работу декодирующего устройства (синхронно производить сдвиги БЗУ и блока деления в автономном режиме), то последовательные состояния фильтра будут равны
77
|
C |
0 |
|
i |
e(x) , |
|
|
|
(x) ≡ x |
|
|||
C1 (x) ≡ xi−1e(x) , |
|
|||||
|
|
|
... |
|
mod g(x) , |
|
|
|
|
|
|
||
i |
|
|
i |
|
|
|
C |
(x) ≡ x |
e(x) = e(x) |
||||
т. е. вычет вида ошибки будет воспроизведен точно через i тактов. В простейшем случае, когда возникла одиночная ошибка E ( x) = x i , т.е. e(x) =1, то на i -м такте Ci (x) ≡1 или
C i = 00...01. При появлении такой комбинации на выходе логической схемы должен появиться сигнал, который инвертирует ошибочный символ.
ЛС
…
ФИЛЬТР
Вход |
Выход |
|
БЗУ
Рис. 8.3. Структура декодирующего устройства
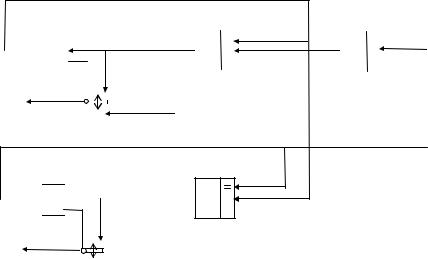
Блок-схема ν-канального декодирующего устройства представлена на рис. 8.4.
Принцип построения ЛС заключается в следующем. Для приема
|
n |
n |
|
||
всего слова длиной |
разрядов требуется z′ = |
|
|
тактов. Поэто- |
|
|
|||||
|
|
|
ν |
|
|
му при наличии ошибки вида xi состояние фильтра после приема кодового слова будет равно
78
C 0 (x) = xi−( z′ ν−n) mod g(x) ,
а последующие состояния при автономной работе будут равны:
C 1 ( x) = x i −( z′ ν−n )−ν , |
|
|
|
|||||||
C 2 |
|
|
′ |
ν−n )−2 ν , |
|
|
|
|||
( x) = xi−( z |
|
|
|
|||||||
|
. . . |
|
|
|
|
mod g(x) . |
||||
C j |
|
|
′ |
|
|
|
|
|
|
|
(x) ≡ xi−( z ν−n)− j ν , |
|
|
|
|
||||||
|
. . . |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ФИЛЬТР |
|
|
|
|
|
|
|
... |
|
|
|
|
… |
|
ЛС |
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
n-k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
2 |
БЗУ |
2 |
... |
... |
|
ν |
|
ν |
Рис. 8.4. Структура декодирующего устройства
Пусть i = j ν +β на в такте j . Тогда
(β < ν) , т.е. ошибка должна быть исправлена j -м такте автономной работы состояние
фильтра равно C j (x) ≡ x j ν+β−( z′ ν−n)− j ν ≡ xβ−( z′ ν−n) , т. е. логическая схема должна распознавать следующие вычеты:
79

при |
β=0 |
′ |
ν − n ) |
x − ( z |
|||
при |
β =1 |
′ |
|
x1−( z ν−n ) |
|||
...
, |
|
, |
mod g(x) . |
xν−1−( z′ ν−n)
при β = ν −1
Таким образом, ЛС в ν -канальном декодере содержит ν выходов. Например, пусть n = 7 , ν = 2 , g(x) =1+ x2 + x3 , тогда
z′ = 4 и логическая схема будет представлять собой две схемы совпадения на следующие коды:
при β=0 x−1 ≡ x7−1 ≡ x6 ≡ x + x2 , то есть 0 1 1;
при β=1 |
x1−1 ≡ x0 ≡1 , то есть 1 0 0 . |
ПОДГОТОВКА К ВЫПОЛНЕНИЮ РАБОТЫ
1.Изучить теоретический материал.
2.Построить одноканальное кодирующее устройство цикличе-
ского кода Хэмминга (7,4) с порождающим многочленом g(x) =1+ x + x3 .
3. Построить трехканальное кодирующее устройство циклического кода Хэмминга (7,4) с порождающим многочленом g(x) =1+ x + x3 .
4.Продемонстрировать процесс формирования проверочных разрядов.
5.Построить структуру трехканального декодирующего устройства циклического кода Хэмминга (7,4) с порождающим много-
членом g(x) =1+ x + x3 .
6.Продемонстрировать процесс исправления произвольной однократной ошибки.
7.Продумать действия, когда количество информационных
разрядов k или длина кода n не кратны канальности ν. 8. Отразить подготовку в лабораторном отчете.
80