

В.В. Зиновьев Компьютерная имитация и анимация программа, методические указания и контрольные задания для студентов заочной формы обучения специальности 210200
.pdf30
*******************************************************************************
* Моделирование работы робокара
*******************************************************************************
ROB |
QUEUE |
HUK |
Ожидание освобождения робокара |
|
SEIZE |
CAR |
Занятие робокара |
|
DEPART |
HUK |
Конец ожидания |
|
ADVANCE |
RVNORM(1,&POG,&POGR) |
Загрузка робокара |
Г- Вывод результатов моделирования на экран |
|
||
BPUTPIC |
FILE=ATF,LINES=6,AC1,N(BOX),FT(CAR),_ |
||
|
|
FR(CAR)/10,QA(HUK),QT(HUK) |
|
time *.* |
Текущее время |
|
|
write b * |
Количество обслуженных заявок |
|
|
write ft *.** |
Ср. время обслуживания заявки |
|
|
write fr *.** |
Загрузка робокара |
|
|
write qa *.** |
Ср. размер очереди на обслуживание |
||
write qt *.** |
Ср. время ожидания заявки в очереди |
||
DES |
TERMINATE |
|
Заявка выполнена |
Этап 3. Отображение динамики технологического процесса при помощи языка компьютерной анимации Proof Animation.
Динамику работы робокара отобразим на компьютерной мнемосхеме технологического процесса при помощи языка компьютерной анимации Proof Animation. Анимация состоит из статических элементов и динамических объектов, которые накладываются на статический фон. В нашем случае статическими элементами являются траектории движения робокара, склад и надписи, а динамическим объектом – робокар.
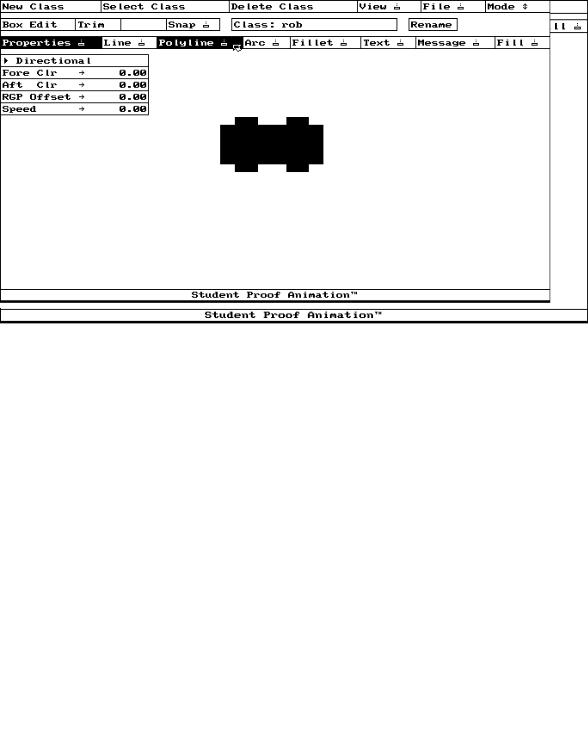
Для рисования статических элементов используем меню Mode и ре-
жим Draw Mode (рис. 3.3).
31
Рис. 3.3. Статичекие элементы анимации
Рисование динамического объекта осуществляем в режиме Class Mode (рис. 3.4).
Рис. 3.4. Динамический объект анимации
Команды управления динамическими элементами для Proof Animation: TIME, CREATE, PLACE АТ, SET COLOR, WRITE и др. заранее вве-
32
дены в программу на языке GPSS/Н (см. выше). В совокупности эти команды при работе программы GPSS/H образуют файл управления анимацией (.atf-файл).
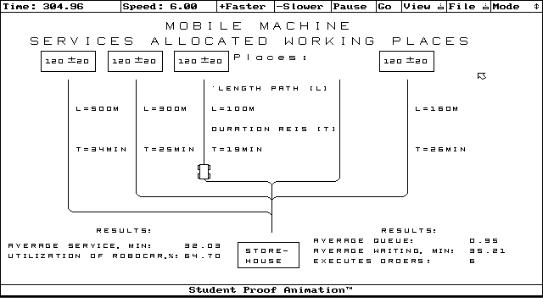
Один из кадров анимации процесса обслуживания рабочих мест робокаром, полученный после имитационного моделирования, показан на рис. 3.5.
Рис. 3.5. Кадр анимации процесса обслуживания рабчих мест робокаром
При подаче заявки соответствующее рабочее место изменяет цвет, а после обслуживания возвращается к первоначальному цвету. Перемещение робокара в пространстве отображается движением его графического аналога на мнемосхеме с соответствующей скоростью. Занятость робокара также отображается сменой цвета. На экран выводятся: количество обслуженных заявок; средняя продолжительность обслуживания заявки; загрузка робокара и другие параметры.
В верхней строке экрана указываются: текущее время имитации (Time), скорость анимации (Speed), ускорение (Faster) или замедление (Slоwer) анимации, остановка изображения (Pause), пуск движущегося изображения (Go), выбор размера, расположения и участка изображения (View), выбор файлов анимации процесса (File), выбор режимов анимации
(Mode).
33
Этап 4. Оценка характеристик технологического процесса на разработанных моделях компьютерной имитации и анимации.
Вимитационных экспериментах вводим исходные данные в файлменю, запускаем GPSS/H-модель и анализируем результаты по сформированной анимации процесса.
Врезультате проведения имитационных экспериментов установлено, что за 8-часовой рабочий день обслужено 10 заявок. При этом средняя продолжительность обслуживания заявки составляла 33,93 мин, загрузка робокара – 76,40%. Средний размер очереди заявок на обслуживание из всех рабочих мест равнялся 2,78. При этом среднее время ожидания заявки в очереди было 82,30 мин.
Для исследования изменения загрузки робокара при изменении числа рабочих мест изменяли число источников заявок (от 1 до 5) и оценивали степень использования робокара для каждого эксперимента.
Подобным образом оценивалось изменение среднего размера очередизаявок на обслуживание от числа рабочих мест при различной скорости движения робокара.
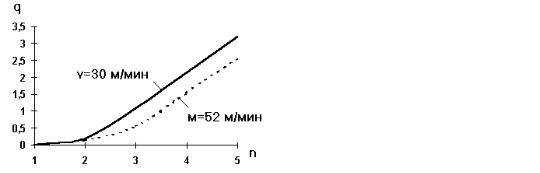
По результатам имитационных экспериментов, выведенным на экран, были построены зависимости степени использования робокара от числа рабочих мест и зависимость среднего размера очередизаявок на обслуживание от числа рабочих мест и скорости робокара (рис. 3.6, 3.7).
Рис. 3.6. Зависимость степени исполь- |
Рис. 3.7. Зависимость среднего разме- |
зования робокара k от числа рабочих |
ра очередизаявок на обслуживание q |
мест n |
от числа рабочих мест n и скорости |
|
движения робокара v (____v=30м/мин; --- |
|
---- |
|
v=52м/мин) |
34
Установлено, что увеличение числа забоев от 1 до 2 приводит к повышению степени использования робокара на 36%. Увеличении числа забоев от 2 до 5 несущественно влияет на загрузку робокара. Изменение составляет 2%.
Средний размер очереди заявок на обслуживание практически не изменяется при числе рабочих мест 1-2. При этом изменение скорости робокара не оказывает никакого влияния на средний размер очереди заявок на обслуживание. При числе рабочих мест от 2 до 5 увеличение скорости робокара уменьшает средний размер очереди в среднем на 26%.
4. ТЕХНИЧЕСКОЕ И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Для выполнения контрольной работы требуется IBM – совместимый персональный компьютер класса 486 и выше, имеющий не менее 2МБ свободной постоянной и 4КБ оперативной памяти, видеопамяти не менее
512КБ.
В качестве программного обеспечения используется лицензионный комплекс компьютерной имитации и анимации, созданный фирмой
Wolverine Software Corporation (США) в 1996 г. Комплекс имеет студенческую (Student GPSS/H – Student Proof Animation) и профессиональную (GPSS/H Professional – Proof Professional) версии. Студенческая версия от-
личается ограничениями на время моделирования (2 мин) и объемом файлов (до 1250 байт).
Программный комплекс может работать в операционной среде DOS 5.0
и выше, Windows 3.1 и выше, Windows NT и Windows 95 и выше или OS/2.
5.УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ ПО ДИСЦИПЛИНЕ
5.1.Основная литература
1.Советов Б.Я. Моделирование систем: Учеб. для вузов. / Б.Я. Советов, С.А. Яковлев. – 3-е изд., перераб. и доп. – М.: Высш. шк., 2001. – 343 с.
35
2.Шеннон Р. Имитационное моделирование систем – искусство и наука. – М.: Мир, 1978. – 420 с.
3.Кузин Л.Т. Основы кибернетики: Учеб. пособие для студентов ву-
зов. – М.: Энергия, 1979. – 584 с.
4.Разработка САПР: Методические указания по лабораторной работе «Имитационное моделирование систем массового обслуживания» / Сост.: И.П. Норенков, Е.В. Федорук. – М.: МГТУ им. Бау-
мана, 1994. – 67 с.
5.Компьютерная имитация и анимация: Методические указания по выполнению курсовой работы / Сост.: В.В. Зиновьев. – Кемерово,
КузГТУ, 2001. – 12 с.
6.Шрайбер Т.Д. Моделирование на GPSS. – М.: Машиностроение, 1980. – 593 с.
7.Основы моделирования на GPSS/PC: Методические указания для слушателей ФПКП по моделированию систем и сетей связи на GPSS/PC / Сост.: Л.А. Воробейчиков, Г.К. Сосновиков. – Москва:
МТУСиИ, 1993. – 58 с.
8.Построение анимационных моделей в Proof Animation: Методические указания к лабораторной работе / Сост.: А.В. Протодьяконов, А.А. Будников, В.В. Зиновьев. – Кемерово: КузГТУ, 2001. – 16 с.
5.2.Дополнительная литература
1.Banks J., Carson J., Ngo Sy J. Getting Started with GPSS/H. – Wolverine Software Corporation, USA, 1995. – 290 c.
2.Конюх В.Л. Компьютерная автоматизация производства: Учеб. пособие: В 2 ч. Ч. 2; ГУ Кузбас. гос. техн. ун-т. – Кемерово, 2002. – 186 с.
3.Henriksen J., Earle N., Lopacki J., Tucker E. Using Proof Animation. – Wolverine Software Corporation, USA, 1994. – 270 с.
4.Теория больших систем управления: Учеб. пособие для вузов / А.А. Денисов, Д.Н. Колесников. – Л.: Энергоиздат, 1982. – 288 с.
36
ПРИЛОЖЕНИЕ 1
Файл-меню модели процесса обслуживания рабочих мест робокаром
******************************************************************
* Исходные данные для модели процесса обслуживания рабочих мест робокаром
******************************************************************
*Значен * Тип данных
******************************************************************
1 |
*Рабочее место 1 (включено 1; выключено 0) |
1 |
*Рабочее место 2 (включено 1; выключено 0) |
1 |
*Рабочее место 3 (включено 1; выключено 0) |
1 |
*Рабочее место 4 (включено 1; выключено 0) |
1 |
*Рабочее место 5 (включено 1; выключено 0) |
7 |
*Среднее время поступления заявки с рабочего места 1 |
0 |
*Отклонение от среднего времени |
120 |
*Среднее время поступления заявки с рабочего места 2 |
20 |
*Отклонение от среднего времени |
120 |
*Среднее время поступления заявки с рабочего места 3 |
20 |
*Отклонение от среднего времени |
120 |
*Среднее время поступления заявки с рабочего места 4 |
20 |
*Отклонение от среднего времени |
120 |
*Среднее время поступления заявки с рабочего места 5 |
20 |
*Отклонение от среднего времени |
500 |
*Расстояние до рабочего места 1 |
300 |
*Расстояние до рабочего места 2 |
100 |
*Расстояние до рабочего места 3 |
200 |
*Расстояние до рабочего места 4 |
160 |
*Расстояние до рабочего места 5 |
30 |
*Скорость робокара, м/мин |
8 |
*Средняя продолжительность загрузки робокара, мин |
2 |
*Отклонение от среднего времени, мин |
8 |
*Продолжительность разгрузки робокара, мин |
2 |
*Отклонение от среднего времени, мин |
480 |
*Продолжительность моделирования, мин |
**************************************************************
ПРИЛОЖЕНИЕ 2
Распечатка GHSS/H-программы с вводом команд управления анимацией
*******************************************************************************
* Модель процесса обслуживания рабочих мест робокаром
*******************************************************************************
* Создание .atf-файла и определение переменных
*******************************************************************************
SIMULATE |
|
Начало моделирования |
ATF FILEDEF |
'robo1.atf' |
Создание .atf файла |
INTEGER |
&M1,&M2,&M3,&M4,&M5,&SHIFT |
Целые переменные |
REAL |
&SA1,&SAS1,&SA2,&SAS2 |
Действительные переменные |
REAL |
&SA3,&SAS3,&SA4,&SAS4,&SA5,&SAS5 |
|
REAL |
&RES1,&RES2,&RES3,&RES4,&RES5 |
|
REAL |
&SCOR,&POG,&POGR,&RASG,&RASGR |
|
|
37 |
|
|
|
Продолжение прил. 2 |
******************************************************************************* |
||
* |
Ввод исходных данных из файла-меню |
|
******************************************************************************* |
||
GETLIST |
FILE=ROBO1,(&M1) |
Выключатель рабочего места 1 |
GETLIST |
FILE=ROBO1,(&M2) |
Выключатель рабочего места 2 |
GETLIST |
FILE=ROBO1,(&M3) |
Выключатель рабочего места 3 |
GETLIST |
FILE=ROBO1,(&M4) |
Выключатель рабочего места 4 |
GETLIST |
FILE=ROBO1,(&M5) |
Выключатель рабочего места 5 |
GETLIST |
FILE=ROBO1,(&SA1) |
Ср. вр. поступления заявки с рабочего места 1 |
GETLIST |
FILE=ROBO1,(&SAS1) |
Отклонение от ср. вр. |
GETLIST |
FILE=ROBO1,(&SA2) |
Ср. вр. поступления заявки с рабочего места 2 |
GETLIST |
FILE=ROBO1,(&SAS2) |
Отклонение от ср. вр. |
GETLIST |
FILE=ROBO1,(&SA3) |
Ср. вр. поступления заявки с рабочего места 3 |
GETLIST |
FILE=ROBO1,(&SAS3) |
Отклонение от ср. вр. |
GETLIST |
FILE=ROBO1,(&SA4) |
Ср. вр. поступления заявки с рабочего места 4 |
GETLIST |
FILE=ROBO1,(&SAS4) |
Отклонение от ср. вр. |
GETLIST |
FILE=ROBO1,(&SA5) |
Ср. вр. поступления заявки с рабочего места 5 |
GETLIST |
FILE=ROBO1,(&SAS5) |
Отклонение от ср. вр. |
GETLIST |
FILE=ROBO1,(&RES1) |
Расстояние от склада до рабочего места 1 |
GETLIST |
FILE=ROBO1,(&RES2) |
Расстояние от склада до рабочего места 2 |
GETLIST |
FILE=ROBO1,(&RES3) |
Расстояние от склада до рабочего места 3 |
GETLIST |
FILE=ROBO1,(&RES4) |
Расстояние от склада до рабочего места 4 |
GETLIST |
FILE=ROBO1,(&RES5) |
Расстояние от склада до рабочего места 5 |
GETLIST |
FILE=ROBO1,(&SCOR) |
Скорость движения робокара |
GETLIST |
FILE=ROBO1,(&POG) |
Ср. продолжительность загрузки робокара |
GETLIST |
FILE=ROBO1,(&POGR) |
Отклонение от среднего времени |
GETLIST |
FILE=ROBO1,(&RASG) |
Ср. продолжительность разгрузки робокара |
GETLIST |
FILE=ROBO1,(&RASGR) |
Отклонение от среднего времени |
GETLIST |
FILE=ROBO1,(&SHIFT) |
Продолжительность моделирования |
PUTPIC |
FILE=ATF,LINES=8,AC1 |
|
time *.* |
|
|
create m m1 create m m2 create m m3 create m m4 create m m5 create rob rob place rob 0 6
*******************************************************************************
* |
Рабочее место 1 |
|
******************************************************************************* |
||
GENERATE |
&SA1,&SAS1,,,,1PL,1PH |
Поступление заявки с рабочего места 1 |
TEST NE |
&M1,0,DES |
Проверка включения рабочего места 1 |
ASSIGN |
1,&RES1/&SCOR,PL |
Время движения до рабочего места 1 |
ASSIGN |
1,1,PH |
Принадлежность заявки 1-му рабочему месту |
BPUTPIC |
FILE=ATF,LINES=6,AC1,&SA1,&SAS1,&RES1,PL1 |
|
TIME *.* |
|
|
set m1 color red |
|
|
place m1 -30 38 |
|
|
write z1 * * |
|
|
write r1 L=*m |
|
|
write re1 t=*min |
|
|
TRANSFER |
,ROB |
Переход к робокару |
|
|
38 |
|
|
Продолжение прил. 2 |
******************************************************************************* |
||
* |
Рабочее место 2 |
|
******************************************************************************* |
||
GENERATE |
&SA2,&SAS2,,,,1PL,1PH |
Поступление заявки с рабочего места 2 |
TEST NE |
&M2,0,DES |
Проверка включения рабочего места 2 |
ASSIGN |
1,&RES2/&SCOR,PL |
Время движения до рабочего места 2 |
ASSIGN |
1,2,PH |
Принадлежность заявки 2-му рабочему месту |
BPUTPIC |
FILE=ATF,LINES=6,AC1,&SA2,&SAS2,&RES2,PL1 |
|
time *.* |
|
|
set m2 color red |
|
|
place m2 -20 38 |
|
|
write z2 * * |
|
|
write r2 L=*m |
|
|
write re2 t=*min |
|
|
TRANSFER |
,ROB |
Переход к робокару |
****************************************************************************** |
||
* |
Рабочее место 3 |
|
****************************************************************************** |
||
GENERATE |
&SA3,&SAS3,,,,1PL,1PH |
Поступление заявки с рабочего места 3 |
TEST NE |
&M3,0,DES |
Проверка включения рабочего места 3 |
ASSIGN |
1,&RES3/&SCOR,PL |
Время движения до рабочего места 3 |
ASSIGN |
1,3,PH |
Принадлежность заявки рабочему месту 3 |
BPUTPIC |
FILE=ATF,LINES=6,AC1,&SA3,&SAS3,&RES3,PL1 |
|
TIME *.* |
|
|
set m3 color red |
|
|
place m3 -10 38 |
|
|
write z3 * * |
|
|
write r3 L=*m |
|
|
write re3 t=*min |
|
|
TRANSFER |
,ROB |
Переход к робокару |
******************************************************************************* |
||
* |
Рабочее место 4 |
|
******************************************************************************* |
||
GENERATE |
&SA4,&SAS4,,,,1PL,1PH |
Поступление заявки с рабочего места 4 |
TEST NE |
&M4,0,DES |
Проверка включения рабочего места 4 |
ASSIGN |
1,&RES4/&SCOR,PL |
Время движения до рабочего места 4 |
ASSIGN |
1,4,PH |
Принадлежность заявки рабочему месту 4 |
BPUTPIC |
FILE=ATF,LINES=6,AC1,&SA4,&SAS4,&RES4,PL1 |
|
TIME *.* |
|
|
set m4 color red |
|
|
place m4 10 38 |
|
|
write z4 * * |
|
|
write r4 L=*m |
|
|
write re4 t=*min |
|
|
TRANSFER |
,ROB |
Переход к робокару |
******************************************************************************* |
||
* |
Рабочее место 5 |
|
******************************************************************************* |
||
GENERATE |
&SA5,&SAS5,,,,1PL,1PH |
Поступление заявки с рабочего места 5 |
TEST NE |
&M5,0,DES |
Проверка включения рабочего места 5 |
ASSIGN |
1,&RES5/&SCOR,PL |
Время движения до рабочего места 5 |
ASSIGN |
1,5,PH |
Принадлежность заявки рабочему месту 5 |
BPUTPIC |
FILE=ATF,LINES=6,AC1,&SA5,&SAS5,&RES5,PL1 |
|
TIME *.* |
|
|
set m5 color red |
|
|
39
Продолжение прил. 2
place m5 20 38 write z5 * * write r5 L=*m write re5 t=*min
*******************************************************************************
* Моделирование работы робокара
*******************************************************************************
ROB |
QUEUE |
HUK |
Ожидание робокара |
|
SEIZE |
CAR |
Занятие робокара |
|
DEPART |
HUK |
Конец ожидания |
|
ADVANCE |
RVNORM(1,&POG,&POGR) |
Загрузка робокара |
time *.* |
BPUTPIC |
FILE=ATF,LINES=4,AC1,PH1,PL1/2,PH1 |
|
|
|
|
|
set rob color red |
|
|
|
set path p* travel *.* |
|
|
|
place rob on p* |
|
|
|
|
ADVANCE |
PL1 |
Движение робокара к рабочему месту |
|
ADVANCE |
RVNORM(1,&RASG,&RASGR) |
Разгрузка робокара |
time *.* |
BPUTPIC |
FILE=ATF,LINES=5,AC1,PH1,PH1,PL1/2,PH1 |
|
|
|
|
|
set rob color green |
|
|
|
set m* color green |
|
|
|
set path p1* travel *.* |
|
|
|
place rob on p1* |
|
|
|
|
ADVANCE |
PL1 |
Движение робокара к складу |
BOX |
RELEASE |
CAR |
Освобождение робокара |
|
BPUTPIC |
FILE=ATF,LINES=6,AC1,N(BOX),FT(CAR),_ |
|
time *.* |
|
FR(CAR)/10,QA(HUK),QT(HUK) |
|
|
|
|
|
write b * |
|
|
|
write ft *.** |
|
|
|
write fr *.** |
|
|
|
write qa *.** |
|
|
|
write qt *.** |
|
|
|
DES |
TERMINATE |
|
Заявка выполнена |
*******************************************************************************
* Продолжительность моделирования
*******************************************************************************
GENERATE |
&SHIFT |
Появление транзакта-таймера |
TERMINATE |
1 |
Удаление транзакта-таймера |
START |
1 |
|
PUTPIC |
FILE=ATF,LINES=2,AC1 |
|
time *.* |
|
|
END |
|
|
END |
|
|