

Теоретическая механика_ Ч_1_()
.pdf1 mB (Q ) Q1 3a Q2 4 a
Q 0,719 3a Q 0,695 0,25a 1,983Q a
Пример 2.3.Равновесие произвольной плоской системы сил
На конструкцию, представленную на рис.2.8, действуют сосредоточенные силы Fс и FE . Сила Fс приложена к точке
C , а сила FE приложена к точке E и наклонена к линии горизонта на угол . Заданная конструкция в точке A жестко заделана в вертикальной стене. Определить реакции связи XA,
YA и реактивный момент ma , если Fc 50H , FE 100H , угол
наклона 300, AB BC 2м, BD DE 4м.
Решение
Заменим схему, представленную на рис.2.8 расчетной схемой (рис.2.11). При этом, пользуясь принципом освобождения от связей, заменим стенку реакциями связи XA,
YA и реактивным моментом ma .
Рис.2.11. Расчетная схема
31

Введем систему координат x,A, y и определим проекции заданных сил на оси координат Ax и Ay .
Fcx Fc 50Н Fcy 0
FEx FE cos(30o) 100 0.86 86Н
FEy FE sin(30o) 100 0.5 50Н
Необходимые и достаточные условия равновесия произвольной плоской системы сил определяются равенствами нулю главного вектора и главного момента. В проекциях на оси координат эти условия запишутся в виде
Fkx 0,
k
Fky 0 ,
k
mo(Fk ) 0 .
k
В данном случае, пользуясь теоремой Вариньона и правилом знаков для вычисления алгебраического момента силы, получим следующую запись уравнений равновесия
(1) Fkx XA Fcx FEx 0
k
(2) Fky YA FEy 0 k
(3) mo(Fk ) ma Fc BC FEx DE Fy AD 0
k
Из уравнения (1) следует
32

XA 50 86 136H
YA 50H ma 144Н м
Отрицательное значение реакции XA означает, что направление реакции, указанное на рис.2.11, угадано не
правильно. |
В |
действительности |
направление |
реакции XA |
||
является |
противоположным |
указанному |
на |
рис.2.11. |
||
Положительное значение реакции YA |
и реактивного момента |
|||||
ma означает, |
что эти направления |
указанные на |
рис.2.11, |
|||
угаданы правильно. |
|
|
|
|
||
Глава 3.Решение задач, в которых рассматривается равновесие сочлененных тел
Необходимые и достаточные условия равновесия произвольной плоской системы сил определяются равенствами нулю главного вектора и главного момента
R 0, M 0.
Поскольку вектор R равен нулю, то равны нулю и его проекции на оси координат и величина M0 0, где M0 -
алгебраический момент, а точка О – произвольная точка в плоскости действия сил.
В этом случае основная форма условий равновесия
запишется в виде
Fkx 0,
k
Fky 0 ,
k
33

mo(Fk ) 0 .
k
Кроме основной формы условий равновесия, существуют еще две формы условий равновесия, обычно используемые для проверки правильности решения задачи.
Вторая форма условий равновесия
Fkx 0,
k
mA(Fk ) 0,
k
mB(Fk ) 0.
k
Третья форма условий равновесия
mA(Fk ) 0,
k
mB(Fk ) 0,
k
mC (Fk ) 0.
k
При решении задач, в которых в равновесии находятся два взаимодействующих между собой тела (так называемые сочлененные тела), надо рассматривать равновесие каждого тела в отдельности.
При этом необходимо учитывать, что силы, с которыми действуют друг на друга два тела, всегда равны по модулю и направлены по одной прямой в противоположные стороны.
Пример 3.1.
Стержень АВ в точке А заделан в стену. В точке В шарниром к ней присоединен второй стержень DE. Стержень
34
DE свободно опирается на гладкую поверхность в точке Е. Стержни АВ и DE образуют сочлененные тела (рис.3.1).
Рис.3.1. Сочленение двух стержней
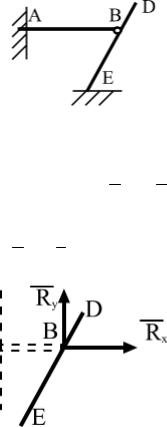
Предположим, что сила действия шарнира В на стержень DE имеет составляющие Rx и Ry , направленные как
указано на рис. 3.2.
Тогда сила действия этого же шарнира В на балку АВ имеет составляющие XB и YB (рис.3.3).
Рис.3.2. Влияние стержня АВ на стержень CD
35
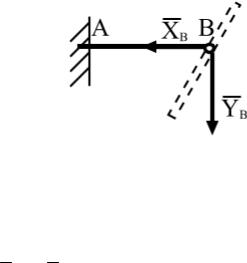
Рис.3.3 Влияние стержня CD на стержень АВ
Причем, в соответствии с аксиомой статики о равенстве сил действия и противодействия, соответствующие силы равны по модулю и противоположны по направлению
|
XB Rx , |
XB Rx , |
|
|
|
|
||||
|
|
|
|
|
YB Ry . |
|
|
|
|
|
YB Ry , |
|
|
|
|
||||||
Пример 3.2. |
|
P1 и |
|
|
|
|||||
Две |
однородные |
балки АВ и DE весом |
|
P2 |
||||||
соединены шарниром В так, как указано на рис. 3.4. |
|
|
|
, |
||||||
На |
балку DЕ |
в точке D действует |
сила |
|
|
|||||
F |
||||||||||
направленная горизонтально.
Определить реакцию опоры в точке Е, усилие в шарнире В и реакцию опоры А.
Составим таблицу данных.
Таблица 3.1
Исходные данные
Величина |
P1 |
P2 |
АВ |
DE |
BD |
F |
Размерность |
н |
н |
м |
м |
м |
н |
Значение |
100 |
160 |
8 |
6 |
2 |
200 |
36
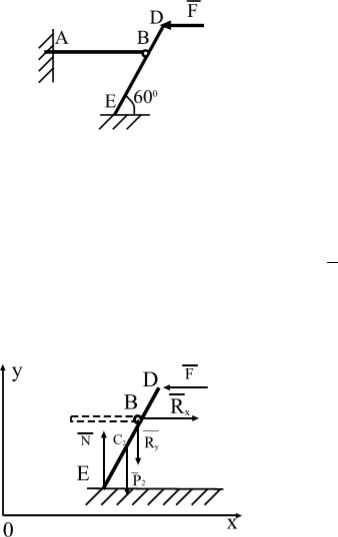
Конструкция представляет собой шарнирное соединение в точке B двух стержней.
Рис.3.4 Исходная постановка задачи
Решение задачи.
Рассмотрим равновесие каждого стержня в отдельности. Для стержня DE нарисуем схему, с указанием всей
действующих на стержень сил (рис.3.5).
На стержень DE действуют: активная сила F , приложенная в точке D и сила P2 , приложенная в точке С2.
Связями для балки являются гладкая горизонтальная поверхность в точке E и неподвижный шарнир в точке B.
Рис.3.5. Схема равновесия стержня DE
37
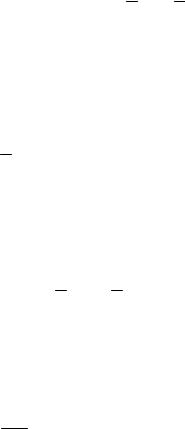
Указываем реакции связей.
Реакцию гладкой поверхности в точке E проводим по нормали к поверхности. Реакция неподвижного шарнира
показана двумя составляющими: Rx и Rу .
Рисуем оси координат.
На балку действует произвольная плоская система сил. Для равновесия такой системы необходимо и достаточно, чтобы выполнялись три условия равновесия:
Fkx 0;
Fky 0;
m0(Fk ) 0.
Моменты всех действующих на стержень DE сил можно вычислять относительной любой произвольно выбранной точки. Однако удобнее в нашем примере в качестве такой точки выбрать точку B. Это связано с тем, что через точку B проходят линии действия двух, пока неизвестных и подлежащих
определению реакций Rx и Rу .В этом случае, моменты этих
сил относительно точки B равны нулю, поскольку линии действия этих сил проходят через точку B.
Проведем вспомогательные вычисления
BE 6 2 4( м);
DE
C2B DB 3 2 1( м). 2
Теперь решение можно оформить в виде следующей таблицы.
38
Значение реакций
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.2 |
||
|
|
|
|
|
|
|
|
|
|
Fkx |
Fky |
m0( |
|
|
|
|
|
Fх |
Fx ) |
||||||||||
|
|
|
|
|
|
|
|
|
F |
0 |
F DB sin600 |
|||
F |
||||||||||||||
|
|
P2 |
0 |
P2 |
P2 C2B sin300 |
|||||||||
|
|
|
|
|
|
|
|
|
0 |
N |
N EB sin300 |
|||
N |
||||||||||||||
|
|
|
|
|
|
x |
Rx |
0 |
0 |
|
||||
R |
|
|||||||||||||
|
|
|
|
|
|
|
y |
0 |
Ry |
0 |
|
|||
|
R |
|
||||||||||||
Составляем уравнение равновесия
1.Fkx F Rx 0;
2.Fky P2 N Ry 0;
3.m0(Fx ) F DB sin600 P2 C2B sin300
N EB sin300 0;
Решаем эти уравнения относительно неизвестных сил
Rx и Rу .и N .
Из уравнения (3) получим:
200 2 
 3 160 1 1 N 4 1 0; 2 2 2
3 160 1 1 N 4 1 0; 2 2 2
откуда
N 213,5(H).
Из уравнения (1) следует, что
Rx F 200(H).
39

Из уравнения (2) определими реакцию Ry
Ry N P2 213,5 160 53,5(H).
Итак:
N 213,5H;
Rx 200H;
Ry 53,5H.
Поскольку все величины получены положительными, значит все искомые силы на чертеже указаны правильно.
Теперь рассмотрим равновесие стержня АВ. Выполняем новый чертеж (рис.3.6) и проводим оси
координат.
На балку действует активная сила P1 , приложенная в
точке С1.
Связями для балки служат шарнир В и заделка в стене,
связанная с точкой А. |
Пользуясь принципом освобождаемости |
|||||||||||
от связей, заменим связи их реакциями. |
|
|
|
|
|
|
||||||
Составляющие реакции шарнира В на балку АВ |
||||||||||||
обозначены |
|
B , |
|
|
|
|
XB Rx |
200 Н, |
||||
X |
YB |
причем |
||||||||||
YB Ry 53,5 H. |
|
|
|
|
|
|
|
|
|
|
|
|
ОБРАТИТЬ |
ВНИМАНИЕ! Составляющие |
|
|
|
|
|
||||||
X |
B , YB |
|||||||||||
направлены противоположно составляющим Rx , Ry ,
соответственно.
40