

Теоретическая механика_ Ч_1_()
.pdfРис.3.6. Равновесие стержня АВ
Реакция заделки имеет три неизвестные
величины: XA , YA , M .
На балку действует плоская система сил. Для равновесия такой системы необходимо и достаточно, чтобы
выполнились три условия равновесия:
Fkx 0;
Fky 0;
m0(Fk ) 0.
Моменты всех действующих на стержень АВ сил можно вычислять относительной любой произвольно выбранной точки. Однако удобнее в качестве такой точки на, нашем примере, выбрать точку А. Это связано с тем, что через точку А проходят линии действия двух, пока неизвестных и подлежащих
41
определению реакций |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
X |
A , YA . |
В этом случае, |
моменты этих |
|||||||||||||||||||||
сил относительно точки А равны нулю. |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
Решение может быть оформлено в виде таблицы 3.3. |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Нагрузка |
Проекция |
Проекция |
Момент |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
на ось Oх |
на ось Oу |
|
|
силы |
|
||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
- |
|
|
|
|
|
|
1 |
|
|
|||
|
P1 |
|
|
P1 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
2 |
AB |
|
||||
|
|
|
|
|
|
|
|
|
0 |
|
|
YB |
|
|
|
|
|
|
|
|
||||
|
YB |
|
|
YB AB |
|
|||||||||||||||||||
|
|
|
|
|
B |
- XB |
0 |
|
0 |
|
|
|||||||||||||
|
X |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
YA |
0 |
|
|
|||||||||
|
YA |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
A |
|
XA |
0 |
|
0 |
|
|
||||||||||||
|
X |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
M |
|
||||||
|
M |
|
|
|
|
|
|
|
||||||||||||||||
Составим уравнения равновесия:
4.Fkx XB XA 0.
5.Fky P1 YB YA 0.
6. mA( |
|
|
) P1 |
|
AB |
YB AB M 0; |
|
Fk |
|||||||
|
|||||||
|
|
|
|
2 |
|
||
Решаем эти уравнения.
Из уравнения (4) следует, что
XA XB 200( H ).
Из уравнения (5) можно подсчитать
YA P1 YB 100 53,5 46,5(H ).
42

Неизвестный момент определится из уравнения (6)
M 100 4 53,5 8 400 428 28(H м).
Усилие в шарнире В равно
RB 
 XB2 YB2
XB2 YB2 
 2002 63,52
2002 63,52

 400 2850
400 2850 
 42850 208(H ).
42850 208(H ).
N 213,5 H;
RB 208 H;
XA 200 H;
YA 46,5 H;
M 28H м.
Таким образом, получены все искомые реакции опор, следовательно, задача статики является решенной.
Для лучшего понимания решения задачи статики для сочлененных тел, приведем решение еще одной задачи с другими типами опор.
Пример 3.3. Определение реакций опор составной конструкции.
Найти реакции опор и давление в промежуточном шарнире составной конструкции. Схема конструкции представлена на рис. 3.7 (размеры – в м), нагрузка указана в таблице 3.4.
43
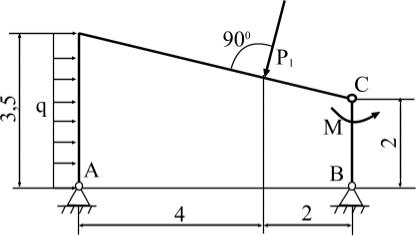
Рис. 3.7. Исходная постановка задачи
|
|
Таблица 1 |
|
P1, кН |
М, кН м |
q, кН/м |
|
|
|
|
|
6,0 |
25,0 |
0,8 |
|
|
|
|
|
Заменим опоры в точках A и B реакциями связи, а распределенную нагрузку сосредоточенной. В этом случае укажем все силы и моменты сил, приложенные ко всей конструкции (рис. 3.8).
Из рис.3.8 следует, что на конструкцию действует следующая система сил: реакции опор RAx , RAy, RBx , RBy ,
сосредоточенная сила P1 , сосредоточенная сила Q и изгибающий момент M .
44
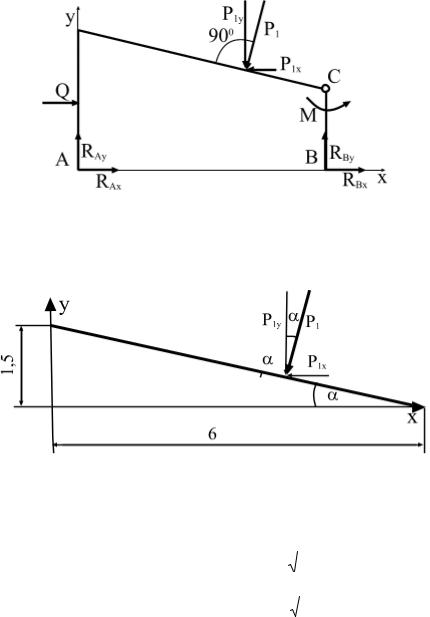
Рис. 3.8. Силы и моменты приложенные ко всей конструкции
Разложим силу P1 на составляющие P1x и P1y .
Рис. 3.9 Определение проекций на оси координат
Вычислим проекции силы P1 на оси координат
P1x P1 |
sin( ) |
sin( ) |
|
|
1.5 |
|
|
0,24 |
||
|
|
|
|
|||||||
62 1,52 |
||||||||||
|
|
|
|
|
|
|
|
|||
P1y P1 |
cos( ) |
cos( ) |
|
6 |
|
|
0,97 |
|||
|
|
|
|
|
||||||
|
62 1,52 |
|
||||||||
|
|
|
|
|
|
|
|
|
||
45
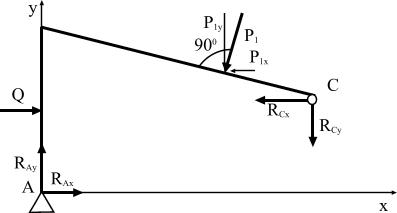
P1x P1 sin( )=1,44 (кН)
P1y P1 cos( )=5,82 (кН)
Q 3.5 q 2.8 (кН)
Разъединим конструкцию на две части и рассмотрим равновесие каждой части в отдельности
Рассмотрим систему уравновешивающихся сил, приложенных к левой части конструкции (рис.3.10):
Рис. 3.10. Силы, приложенные к левой части конструкции
Запишем уравнения равновесия:
1)Fxi 0; RСx RAx Q P1x 0,
2)Fyi 0; RСy RAy P1y 0,
Моменты сил, действующих на левую выделенную часть конструкции будем вычислять относительно точки C.
46
3) MiC |
0; |
|
|
3,5 |
|
2 |
|
|
|
RAx |
2 Q (2 |
2 |
) P1 cos( ) |
RAy 6 0. |
|||||
|
|
||||||||
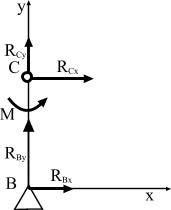
Теперь рассмотрим систему уравновешивающихся сил, приложенных к правой части конструкции (рис.3.11):
Рис.3.11. Силы, приложенные к левой части конструкции
Запишем уравнения равновесия:
4) |
Fxi |
0; |
|
|
R |
R |
|
0, |
|
|||
|
|
|
|
|
|
Сx |
|
Bx |
|
|
|
|
5) |
Fyi |
0; |
|
|
R |
R |
|
0, |
|
|||
|
|
|
|
|
|
Сy |
|
By |
|
|
|
|
6) |
MiC 0; |
|
RBx 2 M 0, |
|
||||||||
|
Таким образом, имеем систему 6 уравнений с 6 |
|||||||||||
неизвестными R |
Ax |
, R |
Ay |
, R |
Bx |
, R |
By |
, R |
, R . |
|||
|
|
|
|
|
|
Cx |
Cy |
|||||
Из уравнения (6)
47

RBx M 25 12,5 kH. 2 2
Из уравнения (4)
RСx RBx 12,5кН
Из уравнения (1) следует
RAx Q P1x RСx 2,8 1,44 12,5 11,14 kH.
Из уравнения (3)
|
|
|
R |
Ax |
2 Q (2 |
3 ,5 |
) P |
1 |
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
R Ay |
|
|
|
|
|
2 |
|
|
|
|
cos( ) |
|
|
|||||||
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
11 ,14 |
2 |
|
2 ,8 (2 |
|
3,5 |
) |
6 |
|
|
2 |
|
|
|
|
|
|||||
|
0,97 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
5,89 kH . |
|||||||
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из уравнений (2) и (5)следует
RСy RAy P1y 5,89 5,82 0,07 kH.
RBy RCy 0,07 kH.
Отрицательные значения реакций говорят о том, что действительное направление RBx и RBy противоположно указанному на рис.3.11.
48
Раздел 2. Пространственная система сил
Глава 4. Равновесие пространственной системы сил
Пространственная система сходящихся сил, подобно плоской системе сил, также приводится к равнодействующей
n
R Fi
i 1
Проекции равнодействующей силы R на оси декартовых координат x, y, z равны суммам проекций слагаемых сил на соответствующие оси, т. е.
n |
n |
n |
Rx Fkx |
Ry Fky |
Rz Fkz |
i 1 |
i 1 |
i 1 |
Для равновесия твердого тела, к которому приложена пространственная система сходящихся сил, необходимо и достаточно, чтобы равнодействующая сил равнялась нулю, т.е.
n
R Fi 0 i 1
или
n |
n |
n |
Rx Fkx 0 |
Ry Fky 0 |
Rz Fkz 0 |
i 1 |
i 1 |
i 1 |
При решение задачи рекомендуется придерживаться следующего порядка:
1)выделить тело или конструкцию, равновесие которой надо рассмотреть;
2)указать все действующие на выделенный объект силы – активные силы и реакции связей;
49

3)в соответствие с принципом освобождения от связей, рассмотреть выделенный объект исследования как свободное тело находящееся под действием активных сил и реакций связей;
4)выбрать систему декартовых координат x, y, z ;
5)составить уравнения равновесия в проекциях на оси координат;
6)решить полученную систему и провести анализ результатов решения задачи.
Начало осей декартовых координат рекомендуется выбрать в точке пересечения линий действия сил.
Для определения проекции силы на ось можно воспользоваться способом двойного проектирования: сначала спроектировать силу на плоскость, содержащую нужную ось, а затем эту проекцию спроектировать на ось.
Пример 4.1
К одной из вершин параллелепипеда (рис.4.1) приложена сила F1 . Определить проекции силы на оси координат.
Углы, |
составленные силой F с осями Ox и Oy |
|||||||
неизвестны, поэтому для вычисления проекций силы |
|
на оси |
||||||
F |
||||||||
Ox и Oy |
воспользуемся способом двойного проектирования: |
|||||||
сначала спроектируем силу |
|
на плоскость Oxy . |
||||||
F |
||||||||
Как известно, проекция силы на плоскость есть вектор |
|
|
||||||
F1 , |
||||||||
равный по модулю: |
|
|
|
|
|
|||
|
|
|
|
|||||
|
|
F F cos300. |
||||||
|
1 |
|
|
|
|
|
||
Теперь вектор F1, лежащий в плоскости xoy, нужно спроецировать на координатные оси ox и oy.
50