

термех кинематика.asp
.pdf9. |
|
|
|
10. |
|
|
|
|
|
М |
х |
|
|
А |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
В |
х |
|
|
|
О |
|
|
|
|
|
|
|
||
|
А |
|
|
|
|
М |
|
S |
|
|
|
|
|
|
|
|
|
|
|
φ |
ℓ |
|
|
|
|
В |
|
|
|
|
|
|
|
||
|
у |
|
|
|
|
|
|
|
|
|
О |
|
|
|
|
|
у |
11. |
|
|
|
12. |
|
|
|
|
|
у |
|
|
у |
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
А |
М |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
А |
М |
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
В |
|
О |
|
|
|
х |
|
|
|
|
|
|
13. |
|
|
|
14. |
|
|
|
х |
С |
|
О у |
|
|
|
|
|
В |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
А |
|
О |
А |
х |
|
|
|
|
|||
|
В |
М |
|
у |
|
|
|
|
|
|
|
|
|
15. |
|
|
S |
16. |
у |
|
х |
|
В |
О |
|
М |
|
|
|
|
А |
|
||
|
|
М |
|
|
|
|
А |
|
|
О |
|
х |
у |
S |
В |
|
31
17. |
|
|
|
М |
18. |
|
|
|
|
|
|
|
|
|
х |
|
О |
О |
φ |
|
|
у |
|
|
|
φ |
|
|
|
|
|
|
|||
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
М |
А |
х |
|
В |
|
|
|
|
|
у |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
19. |
|
у |
|
М |
20. |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
S |
|
|
|
С |
|
|
|
|
|
у |
|
В |
|
|
|
|
О |
|
В |
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
А |
|
|
|
|
φ |
О |
х |
|
|
|
|
|
|
|
М |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
х |
|
|
21. |
|
|
22. |
|
|
23. |
|
|
|
|
|
|
|
S |
M |
|
|
у |
|
|
х |
|
|
А |
|
|
В |
|
|
|
|
О |
|||
|
|
|
|
|
х |
|
||
|
|
|
|
О |
|
|
||
|
|
|
|
В |
|
|
||
|
М |
|
|
|
|
S |
||
|
|
|
|
|
|
|
||
φ |
|
|
|
|
М |
|
|
|
|
|
|
|
|
А |
|
В |
|
О |
|
х |
|
|
|
|
||
А |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
у |
|
|
|
|
|
|
|
|
|
24. |
|
|
|
|
25. |
|
|
|
у |
|
А |
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
О |
φ |
|
|
|
|
φ |
|
А |
|
|
|
х |
О |
|
|
||
|
|
|
|
|
|
х |
||
|
|
|
В |
|
|
|
||
|
ℓ |
|
|
|
|
|
||
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
32
2 ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА |
||||
ОТНОСИТЕЛЬНО НЕПОДВИЖНОЙ ОСИ |
||||
Вращательным движением твердого тела вокруг неподвижной |
||||
оси называется такое движение, при котором хотя бы две точки, принадле- |
||||
жащие телу, остаются неподвижными во время движения тела. Прямая АВ, |
||||
проходящая через эти неподвижные точки называется осью вращения тела. |
||||
Точки тела, расположенные на оси вращения |
неподвижны. Все ос- |
|||
тальные точки тела описывают окружности, плоскости которых перпендику- |
||||
лярны оси вращения, а центры лежат на этой оси. |
|
|||
В |
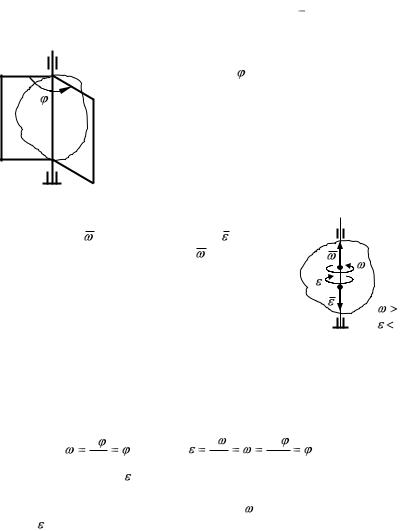
Положение вращающегося тела (рисунок 2.1) |
|||
определяется углом |
(углом поворота тела) между |
|||
|
||||
I |
двумя полуплоскостями I и II, проведенными через ось |
|||
|
вращения. Полуплоскость I – неподвижная, полуплос- |
|||
|
кость II скреплена с вращающимся телом. |
|||
|
Зависимость угла поворота от времени выра- |
|||
|
жает закон вращательного движения тела вокруг не- |
|||
II |
подвижной оси (уравнение движения): |
|||
А |
|
φ = φ (t). |
|
|
Основными кинематическими характеристика- |
||||
Рисунок 2.1 |
||||
|
|
|
||
ми вращательного движения тела являются его уг- |
|
||||||
ловая скорость |
и угловое ускорение . |
|
|
|
|||
|
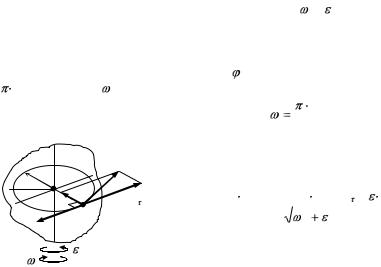
Вектор |
угловой скорости |
совпадает |
с |
|
||
осью вращения и направлен в ту сторону, откуда |
|
||||||
вращение тела видно происходящим против хода |
|
||||||
часовой стрелки (рисунок 2.2). |
|
|
|
0, |
|||
|
Вектор |
углового ускорения |
совпадает по |
||||
|
0. |
||||||
направлению с вектором угловой скорости при ус- |
|||||||
|
|||||||
коренном вращении, и противоположен при замед- |
Рисунок 2.2 |
||||||
ленном вращении. |
|
|
|
||||
|
|
|
|
||||
|
Алгебраическое значение угловой скорости определяется как первая |
||||||
производная по времени от угла поворота тела. Алгебраическое значение |
|||||||
углового ускорения равно первой производной по времени от угловой скоро- |
|||||||
сти или второй производной от угла поворота тела |
|
|
|||||
|
|
d |
d |
d 2 |
|
рад/с2. |
|
|
|
рад/с, |
|
|
2 |
||
|
|
dt |
dt |
dt |
|
||
|
Если знаки ω и совпадают, то вращение будет ускоренным, если не |
||||||
совпадают – замедленным. |
|
|
|
|
|||
|
Алгебраическую угловую скорость |
и алгебраическое угловое ус- |
|||||
корение |
на рисунках изображают дуговыми стрелками вокруг оси враще- |
||||||
ния. Дуговая стрелка для угловой скорости указывает направление вращения |
|||||||
33
тела. При ускоренном вращении дуговые стрелки для и |
имеют одинако- |
вое направление, для замедленного – противоположное (рисунок 2.2). |
|
В технике скорость вращения (частоту вращения) |
задают числом |
оборотов в минуту – n об/мин, а угол поворота тела – числом оборотов N за какое-то время. Зависимость между N об и рад определяется выражением 
= 2 N, а n об/мин и |
рад/с: |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
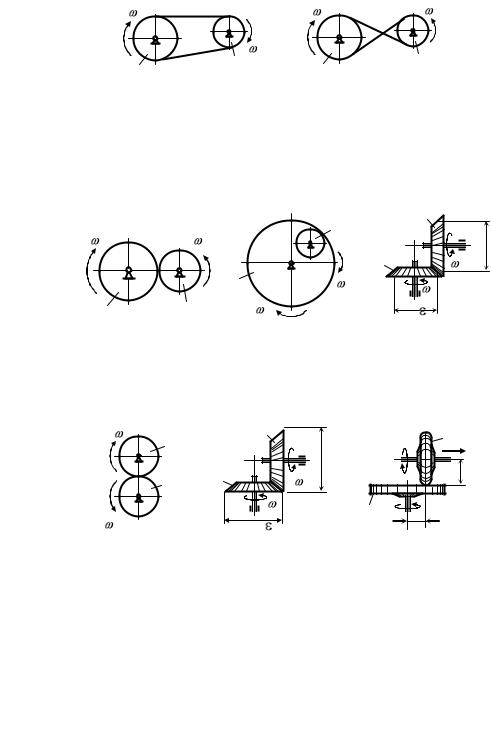
Скорости и ускорения точек вращающе- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
гося тела (рисунок 2.3) определяются по вы- |
||||||
|
|
R |
|
|
|
|
|
a |
|
|
|
ражениям: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
О |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
V = ω R, |
an = ω2 R, |
|
|
a = R, |
|||
|
|
|
|
|
|
|
|
a |
|
|
|||||||||
|
|
|
|
|
a |
n |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
R 4 |
2 |
|
|
|||||||
|
|
|
|
|
|
|
М |
|
|
|
|
a = |
|
, |
|||||
V |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где R – кратчайшее расстояние от точки до |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
оси вращения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Преобразование простейших движений |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Рисунок 2.3 |
|
|
|
|
||||||||||||||
|
|
|
|
|
твѐрдого тела |
|
|||||||||||||
Под преобразованием простейших движений следует понимать:
а) преобразование вращательного движения одного тела в поступательное другого (и обратное преобразование); б) преобразование вращения одного тела вокруг неподвижной оси во враще-
ние другого тела вокруг своей неподвижной оси.
При решении задач о движении механизмов, преобразующих простейшие движения, следует пользоваться совместно формулами кинематики точки и формулами кинематики твѐрдого тела, вращающегося вокруг неподвижной оси.
Передача вращательного движения от одной машины к другой или внутри машины от одного еѐ вала к другому осуществляется разнообразными механизмами, носящими название передач.
Передачи могут быть разделены на передачи с гибкой связью (ременную, канатную, цепную) и передачи, осуществляемые путем непосредственного соприкосновения тел (фрикционную, зубчатую).
Валы и закреплѐнные на них шкивы и колѐса называются ведущими, если они передают движение, и ведомыми, когда они его воспринимают.
1. Ременные передачи. Ременная передача передаѐт вращение одного тела другому, когда их оси вращения параллельны. Подразделяется на открытую (рисунок 2.4) и перекрестную (рисунок 2.5).
34
1 |
|
1 |
2 |
|
|
||
|
|
2 |
|
1 |
2 |
1 |
2 |
|
|
||
|
Рисунок 2.4 |
|
Рисунок 2.5 |
2. Зубчатые передачи. Они являются одним из самых распространенных видов передаточных механизмов, в которых передача вращения осуществляется с помощью пары зубчатых колѐс. Зубчатые пары бывают с внешним зацеплением (рисунок 2.6) и внутренним (рисунок 2.7). Передача движения может осуществляться между параллельными осями с цилиндрическими колѐсами и пересекающимися осями с коническими колѐсами (ри-
сунок 2.8).
1
2
1 2
|
|
|
2 |
|
|
|
1 |
|
|
1 |
2 |
|
|
|
|
|
|
|
2 |
1 |
2 |
|
d2 |
1 |
|
||
|
|
|
|
|
Рисунок 2.6 |
Рисунок 2.7 |
Рисунок 2.8 |
d1
3. Фрикционные передачи. Фрикционная пара представляет собой два прижатых друг к другу колеса (шкива, вала). Вращение одного колеса передаѐтся другому за счѐт сил трения между поверхностями колѐс (рисунок
2.9).
а) |
1 |
b) |
1 |
|
c) |
2 |
|
|
|
||||
1 |
1 |
|
|
|||
|
|
|
d |
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
R |
|
|
2 |
|
1 |
|
|
|
|
|
d2 |
2 |
1 |
|
x |
|
|
|
|
|||
|
|
|
|
|
2
Рисунок 2.9
На рисунке 2.9, а) изображена фрикционная передача с параллельными осями и цилиндрическими колѐсами, на рисунке 2.9, b) – передача с пересекающимися осями, осуществляемая коническими колѐсами.
Во всех колѐсных парах (рисунки 2.6 − 2.9) контактные точки (точки сцепления) имеют общую скорость и общее касательное ускорение, следовательно, справедливы равенства:
35
1 R1 = 2 R2, |
1 |
|
R2 |
, |
1 R1 = 2 R2, |
1 |
|
R2 |
. |
|
|
|
|||||||
|
|
R |
|
|
|||||
2 |
|
|
|
2 |
|
R |
|||
1 |
|
|
1 |
|
|||||
Отношение угловой скорости ведущего колеса к угловой скорости ведомого колеса называется передаточным отношением (передаточным числом) механизма:
k12 = |
1 |
|
R2 |
|
d 2 |
. |
|
|
|
R |
|
||||
2 |
|
|
d |
1 |
|
||
1 |
|
|
|
||||
Принято считать, что если не учитывать проскальзывание, то при ременной передаче (рисунки 2.4 и 2.5) точки бесконечного ремня и поверхностей шкивов также имеют одинаковые скорости и касательные ускорения, следовательно, справедливы те же соотношения.
Для лобовой передачи (вариатора), позволяющей путем поступательного перемещения колеса 2 вдоль диаметра колеса 1 получить переменное передаточное отношение между ведущим и ведомым валами (рисунок 2.9, c), будем иметь:
|
|
k12 = |
1 |
R2 . |
|
|
|
|
|
|
|
|
|
2 |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
M |
|
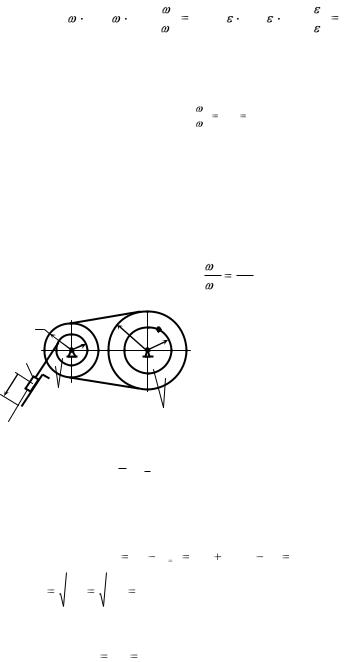
Пример. |
Груз 1 на нерастяжи- |
|||||
R3 |
мой |
нити, намотанной на |
барабан |
2, |
||||||
|
r2 |
r3 |
||||||||
|
опускается по закону х = х (t) по непод- |
|||||||||
1 |
|
|
||||||||
|
|
вижной плоскости. Определить скорость |
||||||||
|
|
|
||||||||
S |
|
|
и ускорение точки М, расположенной на |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
ободе шкива 3, в момент времени, когда |
|||||||
|
|
3 |
груз |
пройдѐт |
расстояние |
S |
(рисунок |
|||
|
|
2.10). |
|
|
|
|
|
|
|
|
х |
Рисунок 2.10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
70t2 |
|
||
|
|
|
|
Дано: |
х |
= |
20 |
+ |
см, |
|
R2 = 50 cм, r2 = 30 см, R3 = 60 см, r3 = 40 см, S = 0,4 м. |
|
|
|
|
|
|||||
Определить: VM , aM .
Решение.
1. Найдем момент времени t1, когда расстояние S, пройденное грузом 1,
равно 40 см:
|
|
|
|
|
|
S x |
t |
x |
t |
0 |
( 20 70t 2 |
) 20 70t 2 |
, |
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда |
t1 |
S |
40 |
|
|
0,76 c. |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
70 |
|
|
70 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. Определяем скорость груза: |
|
|
|
||||||||||||||
|
|
|
|
|
V1 |
|
dx |
|
140t, |
при t1 = 0,76 с, V1 = 106,4 см/с. |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
36
3. Определяем угловую скорость и угловое ускорение барабана 2:
|
V1 |
140t |
4,67t , при t1 = 0,76 с, ω2 = 3,55 рад/с, |
||||||
2 |
|
r2 |
|
r2 |
|||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
d 2 |
|
d( 4,67t ) |
4,67 |
2 |
|
|
|
2 |
|
|
|
рад/с . |
||
|
|
|
dt |
|
dt |
||||
|
|
|
|
|
|
|
|
||
Так как ε2 не зависит от t, то вращение тела 2 является равноускорен-
ным.
4. Определяем угловую скорость и угловое ускорение шкива 3, т.к.:
|
|
|
|
2 |
|
|
R3 |
|
, то |
|
|
R2 |
|
|
|
50 |
|
4,67t |
|
3,89t . |
|
||||||||||||
|
|
|
|
|
|
|
R2 |
3 |
|
R3 |
2 |
60 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
3 |
|
|
|
|
d( 3,89t ) |
|
2 |
|||||
При t1 = 0,76 c имеем ω3 = 2,94 рад/с, |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3,89 |
рад/с . |
|||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
dt |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5. Определяем скорость и ускорения точки М: |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
VM = |
|
3∙r3 = 117,6 см/с, |
|
aM = 3 |
r3 = 155,6 см/с2, |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||
|
|
n |
= |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
2 |
|
|
|
|
|||||||
|
|
aM |
3 |
r3 = 345,7 см/с , aМ = r3 |
|
|
|
3 |
3 |
|
= 379,1 см/с . |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VM |
|
|
|
|
|
a M |
|
|
3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
2 |
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
|
|
|
a |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Рисунок 2.11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
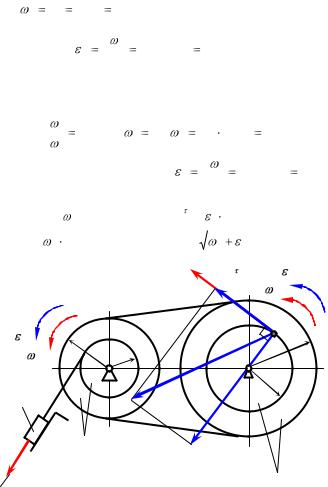
Все найденные кинематические характеристики показаны на рисунке
2.11.
37
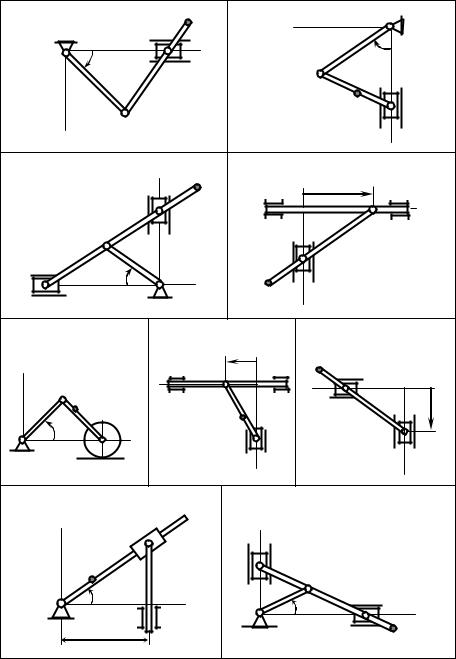
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
Эта тема представлена 25 вариантами по 6 задач в каждом варианте. Рисунки к задачам 5 и 6 приведены на страницах 55 61.
Основные кинематические задачи при данном виде движения условно можно объединить в четыре группы.
К первой группе относятся задачи, в которых по каким-то заданным характеристикам движения требуется установить закон вращательного движения тела.
Во вторую группу входят задачи, в которых по заданному закону движения тела определятся параметры движения тела или отдельных его точек.
Третья группа содержит задачи, в которых по заданным угловым характеристикам движения тела определяются линейные скорости и ускорения каких-то точек тела и наоборот.
В отдельную группу можно выделить задачи на передачу вращательного движения от одного тела к другому и на преобразование вращательного движения одного тела в поступательное движение другого тела и наоборот.
Задачи с первой по четвертую относятся к первым трем типам; задачи пятая и шестая относятся к последней группе.
В связи с многообразием задач по данной теме рекомендовать конкретную последовательность их решения нецелесообразно. Ограничимся лишь общими указаниями, которых необходимо придерживаться при решении задачи любого типа.
1.Понять физический смысл задачи. Выполнить соответствующий условию задачи рисунок − схему.
2.Показать на рисунке все известные и определяемые векторы скоростей и ускорений точек тела, направления вращения тел.
3.Исходя из условия задачи, выбрать нужные зависимости (формулы) между известными и определяемыми величинами и вычислить последние.
УСЛОВИЯ ЗАДАНИЙ
Задание 2.01
2.01.1.Тело вращается относительно неподвижной оси согласно уравнению φ = t3 – 3t ( − рад, t – с). Определить угловую скорость, угловое ускоре-
ние, число оборотов, сделанных телом, и характер движения при t1 = 1 c и t2 = 5 c.
2.01.2.Написать уравнение движения диска турбины при пуске еѐ в ход, если известно, что угол поворота изменяется пропорционально кубу
38

времени, и при t1 = 3 с угловая скорость соответствует 810 об/мин. Определить угловую скорость диска при t2 = 6 c.
2.01.3.Используя уравнение движения диска, полученное в предыдущей задаче, определить скорость и ускорение его точек, отстоящих от оси вращения на 0,2 м при t = 1 c.
2.01.4.Диск радиусом 2 м вращается равноускоренно из состояния покоя. Через 10 с точки, лежащие на его ободе, имеют линейную скорость 100 м/с. Найти скорость и ускорение точек обода через 15 с после начала движения.
2.01.5.Зубчатое колесо 1 радиусом R1 = 0,1 м конической пары вращается с постоянной угловой скоростью 30π рад/с. Определить скорость и уско-
рение точки М, лежащей на колесе 2 радиусом R2 = 0,15 м на расстоянии h = R1 от оси вращения.
2.01.6.Механизм приводится в движение посредством груза 1, опускающегося по наклонной плоскости по закону х = 25t 2 + 50 (х – см, t – с). Ра-
диусы барабанов: R2 = 30 cм, r2 = 25 см, R3 = 20 см. Определить скорость и ускорение точки М барабана 3 в момент времени, когда груз опустится на расстояние равное 1 м.
Задание 2.02
2.02.1. Тело вращается относительно неподвижной оси согласно уравнению φ = 0,01(t3 – 2t) ( − рад, t – с). Определить угловую скорость, угловое ускорение, число оборотов, сделанных телом, и характер движения при t1 = 2 c и t2 = 4 c.
2.02.2.Вал, начиная вращаться из состояния покоя равноускоренно, и за первые 5 с, совершает 12,5 оборотов. Написать уравнение движения вала и определить его угловую скорость через 10 с после начала движения.
2.02.3.Используя закон движения вала, полученный в предыдущей задаче, определить скорость и ускорение точки, лежащей на его поверхности, при t = 2 c, если радиус вала равен 5 см.
2.02.4.Маховое колесо радиусом 1 м вращается вокруг неподвижной оси согласно закону φ = 2π sinπt ( − рад, t – с). Определить скорость и ускорение точки, лежащей на ободе маховика, в момент времени t = 2 с.
2.02.5.Шкив 2 радиусом R2 = 0,75 м приводится в движение из состояния покоя бесконечным ремнем от шкива 1 радиусом R1 = 0,3 м, угловое ус-
39

корение которого равно 0,004π рад/с2. Пренебрегая скольжением ремня по шкивам, определить время, по истечении которого, шкив 2 будет делать 300 оборотов в минуту. Определить скорости точек обода шкива 1.
2.02.6.Груз 1, опускаясь по закону х = 30t2 + 100 (х – см, t – с), приводит
вдвижение механизм. Радиусы колес: R2 = 80 cм, r3 = 40 см, R3 = 60 cм. Определить скорость и ускорение точки М колеса 3 в момент времени, когда груз 1 опустится на расстояние равное 1,2 м.
Задание 2.03
2.03.1. |
Тело |
вращается относительно неподвижной |
оси по закону |
|
φ = 2t3 – 9t2 + 0,12t |
( − рад, t – с). Определить |
угловую скорость, угловое |
||
ускорение, |
число |
оборотов, сделанных телом, |
и характер |
движения при |
t1 = 0 c и t2 = 3 c. |
|
|
|
|
2.03.2.Маховое колесо начинает вращаться из состояния покоя равноускоренно и через 4 минуты имеет угловую скорость, соответствующую 1200 об/мин. Определить количество оборотов, сделанное маховиком за это время, и написать уравнение его движения.
2.03.3.Используя уравнение вращения махового колеса, полученное в предыдущей задаче, определить скорость и ускорение точки, лежащей на его ободе, при t = 6 с, если диаметр колеса равен 1 м.
2.03.4.Тело совершает колебательные движения вокруг неподвижной
оси согласно закону φ = 0,5π sin2πt ( − рад, t – с). Определить скорость и ускорение точки тела, находящейся на расстоянии 0,2 м от оси вращения в момент времени t = 1 с.
2.03.5.Шкив 1 радиусом R1 = 0,4 м приводится в движение из состояния
покоя бесконечным ремнем от шкива 2 радиусом R2 = 0,8 м, угловое ускорение которого равно 0,4π рад/с2. Пренебрегая скольжением ремня по шкивам, определить время, по истечении которого шкив 1 будет делать 300 оборотов
вминуту. Вычислить скорость точек обода шкива 1.
2.03.6.Груз 1, опускаясь по закону х = 6 + 64t2 (х – см, t – с), приводит в
движение механизм. Радиусы колес: R2 = 100 см, r2 = 64 см, R3 = 80 см. Определить скорость и ускорение точки М колеса 3 в момент времени, когда груз 1 опустится на расстояние равное 0,64 м.
40