1. Обобщенная структурная схема среднего и нижнего уровней асу тп.
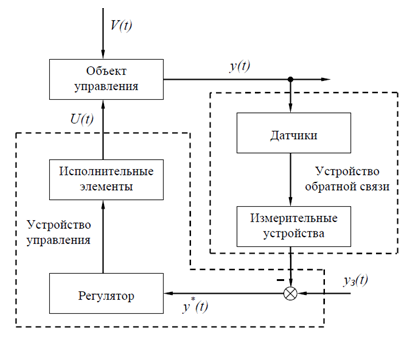
уз(t)- задающие сигналы
у*(t)- ошибка (отклонение)регулируемой переменной
U(t)- управляющее воздействие
V(t)- возмущающее воздействие
у(t)- выходная координата (тех переменная)
На среднем уровне АСУ ТП чаще всего располагаются микропроцессорные регуляторы, выполняющие функции управления исполнительных элементов в реальном времени (в темпе протекания переходных процессов в объекте управления)
На нижнем рассоложены сами исполнительные элементы управления (двигатель, объект управления), датчики, измерительные устройства.
Системы защиты находятся между этими уровнями.
2.Математическое описание тех. Объекта и тп в пространстве состояний (векторно - матричная форма)
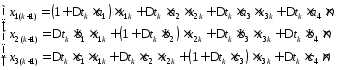
Большинство технологических объектов могут быть описаны дифференциальными уравнениями в форме Коши и приведены к векторно-матричной форме записи в пространстве состояний следующего вида:

(1) - дифференциальное уравнение, описывающее поведение объекта или процесса
(2) - алгебраическое
уравнение, описывающее технологическую
возможность измерительной системы
измерять компоненты n-мерного
вектора переменных состояния и компонентыr-мерного
вектора управляющих воздействий
и компонентыr-мерного
вектора управляющих воздействий
A–n×n –
матрица коэффициентов переменных
состояния;
–
матрица коэффициентов переменных
состояния;
B–n×r –
матрица управляющих воздействий;
–
матрица управляющих воздействий;
U–r– мерный вектор,y-m-мерный вектор,
C–m×n –
матрица, характеризующая техническую
возможность измерения переменных
состоянияx(t),
–
матрица, характеризующая техническую
возможность измерения переменных
состоянияx(t),
D–m×r– матрица, характеризующая техническую возможность измерения переменных управляющих воздействий
Если

 то
то



Структурная схема, соответствующая данным уравнениям:

Пример
Рассмотрим алгоритм записи дифференциального уравнения второго порядка в виде уравнений в форме Коши. Допустим, система представлена уравнением вида
 ,
(6.6)
,
(6.6)
где
 – входная переменная,
– входная переменная, – выходная переменная – в терминах
пространства состояний.
– выходная переменная – в терминах
пространства состояний.
Структурная схема, соответствующая этому уравнению приведена на рис.

Рисунок 6.6 - Структурная схема, соответствующая уравнению (6.6)
Введем дополнительные переменные и обозначим

Запишем уравнения в форме Коши:

В форме Коши данная система имеет вид:

или в компактном виде
 .
.
Т.к. выходная
переменная определяется уравнением
 ,
то можно записать:
,
то можно записать: или в компактном виде
или в компактном виде .
.
4. Передаточная функция технологического процесса в матричном виде. Условия применения математической модели технологического процесса в операторном пространстве.
Параметры модели в пространстве состояний:

В векторно-матричной форме:

Введем обозначения:
 ;
; ;
; .
.
Векторно-матричное уравнение в нормальной форме Коши:
 .
.
Модель в операторном пространстве:
 .
.
Запишем матричную передаточную функцию.

Передаточная функция:
 .
.
Условия:
1) нулевые начальные условия;
2) линейная или линеаризованная исходная модель.
5. Дискретная модель технологического процесса.
Параметры модели в пространстве состояний:

Запишем модель в дискретной форме.