

МЕХАНИКА (1)
.pdfским параметром является передаточное отношение, представляющее собой отношение угловых скоростей звеньев:
i |
ω1 |
, i |
ω2 |
. |
|
|
|||
12 |
ω2 |
21 |
ω1 |
|
|
|
|||
Очевидно, что |
|
|
|
|
|
|
|
|
|
|
|
i |
|
1 |
|
. |
|
|
|
|
|
У |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
21 |
|
i12 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При параллельных осях вращения звеньев передаточное отноше- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
ние считается положительным, если направления угловых скоро- |
|||||||||||||||||||
стей звеньев одинаковые, и отрицательным, если эти направления |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
противоположные (см. рис. 12.7). Передаточное отношение может |
|||||||||||||||||||
быть выражено через параметры механизма: |
Б |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
ω1 |
|
|
|
r2 |
|
|
z2 |
, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
12 |
|
ω2 |
|
|
r1 |
й |
|
|
|||||||
|
|
|
|
|
|
|
|
|
z1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|||||||
где r1 |
и r2 |
– радиусы фрикци нных катков; |
|
|
|
||||||||||||||
z1 |
и z2 |
|
|
|
|
|
р |
|
|
|
|
|
|
||||||
– числа зубьев к лес в случае зубчатой передачи. |
|
||||||||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ГЛАВА 13. ОСНОВЫ РАСЧЕТА |
|
|
||||||||||||||
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И ПРОЕКТИРОВАНИЯ МЕХАНИЗМОВ |
|
|
|||||||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13.1. Общие сведения о передачах. |
|
|
||||||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
Основные виды зубчатых передач |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
П р дачами в машинах называются устройства, предназначен- |
|||||||||||||||||||
ныедля передачи энергии механического движения на расстояние |
|||||||||||||||||||
и преобразования его параметров. Необходимость применения |
|||||||||||||||||||
Робусловлена несовпадением требуемых |
скоростей движения ис- |
||||||||||||||||||
полнительных органов с оптимальными скоростями двигателей; преобразованием видов движения (вращательного в поступательное), регулированием скорости, распределением потоков мощно-
111

сти между различными исполнительными органами машины, реверсированием движения.
По принципу работы механические передачи делятся на передачи с непосредственным соприкосновением звеньев (фрикционные, зубчатые, червячные, волновые, винт-гайка, шарнирно-рычажные) и передачи с гибкой связью (ременные, канатные, цепные).
Передачи выполняются с постоянным или переменным (регулируемым) передаточным отношением. В последнем случае регулиро-
вание может быть ступенчатое или бесступенчатое. |
Н |
||||||||||
Наряду с механическими широко применяются гидравлическиеУ, |
|||||||||||
пневматические и электрические передачи. |
|
||||||||||
Зубчатая передача – это трехзвенный механизм, в которомТдва |
|||||||||||
подвижных звена являются зубчатыми колесами, образующими меж- |
|||||||||||
ду собой высшую пару. Достоинства: высокая надежность работы в |
|||||||||||
|
|
|
|
|
|
|
|
|
|
й |
|
широком диапазоне скоростей и нагрузок, малые габариты, большая |
|||||||||||
долговечность, высокий КПД, сравнительно малыеБнагрузки на валы |
|||||||||||
и подшипники, постоянство передаточного отношения, простота об- |
|||||||||||
|
|
|
|
|
|
|
р |
|
|
||
служивания. Недостатки: высокие требован я к точности изготовле- |
|||||||||||
ния и монтажа, повышенный шум п |
больших скоростях. |
||||||||||
|
|
|
|
|
|
о |
|
|
|
||
В зависимости от расположенияиосей вращения колес различают |
|||||||||||
следующие виды зубчатых пе едач: с параллельными осями (ци- |
|||||||||||
|
|
|
|
|
т |
|
|
|
|
|
|
линдрические), с пересекающимися осями (конические), со скрещи- |
|||||||||||
|
|
|
|
и |
|
|
|
|
|
|
|
вающимися осями. |
|
|
|
|
|
|
|
||||
Цилиндрическ е передачи: с внешним (рис. 13.1, а) и внутрен- |
|||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
ним зацеплением (р с. 13.1, б); |
частным случаем является реечная |
||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
передача (рис. 13.1, в), осуществляющая преобразование враща- |
|||||||||||
тельного движения в поступательное. |
|
|
|
||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
б |
|
|
в |
Рис. 13.1. Цилиндрические зубчатые передачи
112
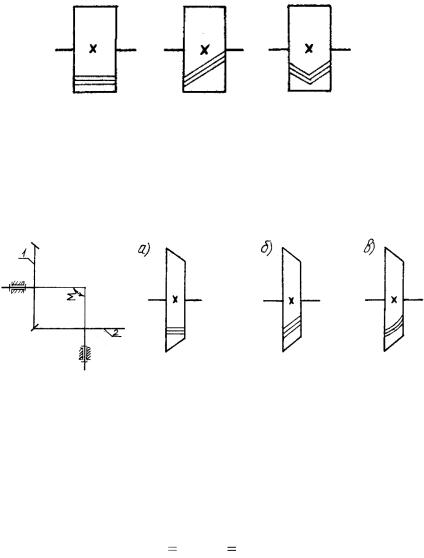
Цилиндрические колеса могут быть с прямыми (рис. 13.2, а), косыми или винтовыми (рис. 13.2, б) и шевронными зубьями (рис. 13.2, в).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
а |
|
|
|
|
|
б |
|
|
|
|
|
в |
Т |
|||
Рис. 13.2. Цилиндрические колеса |
Н |
|
||||||||||||||
|
|
|
|
|||||||||||||
Конические передачи чаще всего выполняются ортогональными, |
||||||||||||||||
у которых межосевой угол ∑ = 90° (рис. 13.3). |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
й |
|
|
|
|
||||
Конические колеса могут быть с прямыми, тангенциальными и |
||||||||||||||||
криволинейными (чаще всего круго |
|
|
) зубьямиБ(рис. 13.4). |
|
||||||||||||
|
|
|
|
|
|
|
выми |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
||
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
з |
|
|
а |
|
|
|
|
|
|
|
б |
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 13.3. К ническая |
|
|
|
|
Рис. 13.4. Конические колеса |
|
||||||||||
передача |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Червячнаяоередача (рис. 13.5) состоит из червяка 1, представ- |
||||||||||||||||
ляющ го собой однозаходный или многозаходный винт, и червяч- |
||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ного кол са 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зубчатое колесо передачи с меньшим числом зубьев называется |
||||||||||||||||
шестерней (z1), а с большим числом зубьев – колесом (z2). |
|
|||||||||||||||
|
|
i |
z2 |
, i |
|
ω1 |
. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
12 |
z1 |
|
12 |
|
ω2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
113

|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
Рис. 13.5. Червячная передача |
|
|
|
||||
|
|
|
и |
|
|
|
|
||
По соотношению угловых скоростей ведущего и ведомого звень- |
|||||||||
ев зубчатые передачи делятся на пон жающие (редукторы) и по- |
|||||||||
|
|
|
р |
|
|
|
|
|
|
вышающие (мультипликато ы). У пон жающих передач ведомое |
|||||||||
|
|
одах |
|
|
|
|
|
|
|
звено вращается с меньшей ско остью, чем ведущее ( ω2 |
ω1 ), a у |
||||||||
|
|
т |
|
|
|
|
|
|
|
повышающих – наоборот ( ω2 |
ω1 ). |
|
|
|
|
|
|||
13.2. Общие сведен я о ме |
|
изготовления зубчатых колес |
|||||||
|
з |
|
|
|
|
|
|
|
|
Существуют два пр нц пиально различных метода изготовления |
|||||||||
та ис ользуются модульная дисковая (рис.13.6) или пальцевая |
|||||||||
зубчатых к лес – методикопирования и метод обкатки (огибания). |
|||||||||
п |
|
|
|
|
|
|
|
|
|
При мет де к пирования профиль инструмента точно совпада- |
|||||||||
ет с р филем впадины изготовляемого колеса. В качестве инстру- |
|||||||||
Рмен |
|
|
|
|
|
|
|
|
|
фреза, фасонный резец и др. После обработки каждой впадины заготовка поворачивается на один угловой шаг:
τ360z .
Процесс повторяется до тех пор, пока не будут нарезаны все зубья (τ – центральный угол). Так как форма эвольвенты зависит от
114

радиуса основной окружности, то колёса одного модуля, но с разным числом зубьев должны нарезаться фрезами с различной кривизной эвольвенты. Но бесконечное количество фрез иметь невозможно, поэтому промышленностью изготавливаются комплекты,
состоящие из восьми фрез. Это приводит к неточности изготовле- |
|||||||||
ния колес. Вторым существенным недостатком метода копирования |
|||||||||
является низкая производительность труда. |
|
|
У |
||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
и |
|
|
|
При методе обкатки инструмент и заготовка имеют такое же |
|||||||||
|
|
|
Рис. 13.6. Нарезание зубьев методом копирования |
|
|
||||
относительное |
|
, как два зубчатых колеса в зацеплении. |
|||||||
|
|
|
|
движение |
|
|
|
|
|
Поэтому инструмент предсоавляет собой колесо с зубьями эволь- |
|||||||||
|
|
|
з |
|
|
|
|
|
|
вентного профиля, заточеннымит |
для осуществления резания. Такое |
||||||||
инструментальное колесо называется долбяком (рис. 13.7). |
|
||||||||
|
|
о |
|
|
|
|
|
||
|
п |
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
Рис. 13.7. Нарезание зубьев методом обкатки
115

Кроме долбяка используются зуборезная рейка с прямолинейными профилями зубьев или червячная фреза, которая в нормальном сечении витков имеет профиль рейки. Преимущества метода обкатки: высокая производительность, большая точность, возможность нарезания колес одного модуля с различными числами зубьев
одним и тем же инструментом. |
|
|
|
|
|
|
|
|
|
|
У |
|||||||||||
|
|
13.3. Кинематика зубчатых механизмов |
|
|||||||||||||||||||
|
|
|
|
|||||||||||||||||||
|
|
|
с неподвижными осями вращения |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|||
Для получения больших передаточных отношений применяются |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|||
многоступенчатые передачи, составленные из несколькихТпростых |
||||||||||||||||||||||
зубчатых передач. Рассмотрим трехступенчатую передачу (рис. 13.8). |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Рис |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
о |
|
|
. 13.8. Трехступенчатая передача |
|
|
|
|
|
||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
ω4 |
|
|
|
|
|
|
|
|
|||
Передат чн е |
|
тношение всего механизма |
|
|
|
|
|
|
||||||||||||||
е |
|
|
|
|
|
|
|
i |
|
|
ω1 |
, |
|
|
|
|
|
|
|
(13.1) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
а передаточное отношение отдельных ступеней – |
|
|
|
|
|
|||||||||||||||||
Р |
|
i |
|
|
ω1 |
, |
i |
|
ω2 |
|
ω2 |
, |
i |
ω3 |
|
ω3 |
. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
12 |
ω2 |
|
2 3 |
ω3 |
|
ω3 |
|
3 4 |
ω4 |
|
ω4 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Перемножим эти отношения:
116

|
i |
|
i |
i |
|
|
|
ω1 |
|
|
|
ω2 |
|
|
|
ω3 |
|
|
|
ω1 |
. |
|
|
|
|
|
(13.2) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
12 |
2 3 |
3 4 |
|
|
ω2 |
ω3 |
ω4 |
|
ω4 |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Сравнивая выражения (13.1) и (13.2), получим |
|
|
У |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
i14 |
|
|
|
i12 i2 3 i3 4 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
т. е. передаточное отношение многоступенчатой передачи равно |
|||||||||||||||||||||||||||||||||||||||
произведению передаточных отношений отдельных ступеней. |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
Колеса 1 и 4 вращаются в одну сторону. Таким образом, |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z3 |
|
|
|
Б |
|
|
|||||||
|
|
|
i |
i |
|
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
z2 |
|
|
|
|
|
z4 |
. |
|
|
|
||||||||
|
|
|
14 |
12 |
|
2 3 |
|
3 4 |
|
|
|
|
|
|
z1 |
z2 |
|
z3 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|||||||||||||||
Если все ступени являются цилиндрическими передачами, то в |
|||||||||||||||||||||||||||||||||||||||
общем случае |
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
i1n |
|
|
1 |
|
k |
|
z2 |
|
|
|
z3 |
|
|
|
|
|
|
|
zn |
|
|
|
|
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
иz z |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
n 1 |
|
|
|
|
|
|
|
||||||||
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где k – число внешних зацеплений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
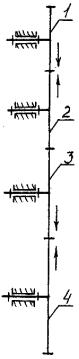
Частным случаем многос упенчатой передачи является ступен- |
|||||||||||||||||||||||||||||||||||||||
чатый ряд с промежуточнымит |
|
(паразитными) колесами (рис. 13.9). |
|||||||||||||||||||||||||||||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточное отношен е для такой передачи |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
з |
|
|
|
3 |
z |
2 |
|
|
|
|
z |
z |
4 |
|
|
|
|
|
|
z |
4 |
|
|
|
|
|
||||||||||||
|
|
|
i |
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
е |
|
|
14 |
|
|
|
|
|
|
z1 |
|
z2 |
z3 |
|
|
|
|
z1 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Промпжуточные колеса не влияют на величину общего переда- |
|||||||||||||||||||||||||||||||||||||||
точного отношения, но могут изменять его знак. |
Такие передачи |
||||||||||||||||||||||||||||||||||||||
применяются для изменения направления вращения ведомого звена, а также в случае передачи вращения между удаленными валами. В общем случае
i |
1 k |
zn |
. |
|
|||
1n |
|
z1 |
|
|
|
||
117
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
Т |
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
й |
|
|
|
|
|
|
и |
|
|
|
|
|
|
р |
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
подви |
|
|
|
|
|
|
|
Рис. 13.9. Передача с промежуточными колесами |
|
|
|||||
з |
|
|
|
|
|
|
|
13.4. К нематика зубчатых механизмов |
|
|
|||||
о |
|
|
|
|
|
|
|
с жными осями вращения |
|
|
|||||
К механизмам с подвижными осями относятся механизмы, в со-
ставе |
|
|
кот рых имеется хотя бы одно колесо с перемещающейся в |
пространстве осью вращения (сателлит). Различают три вида таких |
|
м ханизмовп: |
|
1) |
дифференциальные; |
2) |
планетарные; |
3) |
замкнутые дифференциальные. |
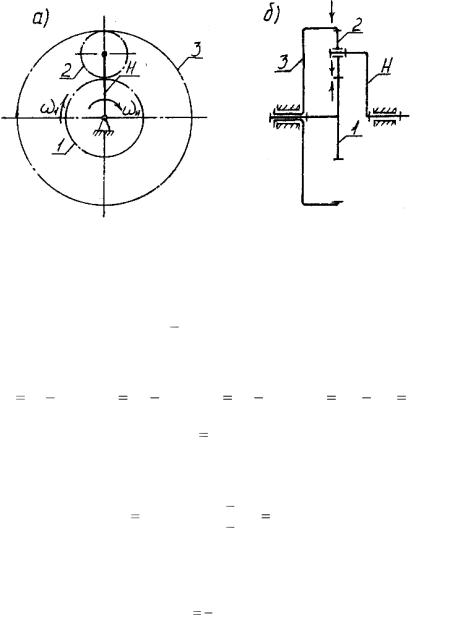
РРассмотрим один из простейших дифференциальных механиз- |
|
мов (рис. 13.10). Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н – водило. Водило Н и соосные с ним центральные колеса 1 и 3
называются основными звеньями.
118
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|||
|
|
|
|
|
|
|
|
Рис. 13.10. Дифференциальная передача |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
||
|
Получим формулу, связывающую угловые скорости звеньев в |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
||
дифференциальном механизме. Используем метод обращения дви- |
||||||||||||||||||||||||||||
жения. Сообщаем всем звеньям механ зма дополнительную угло- |
||||||||||||||||||||||||||||
вую скорость, равную угловой ско |
й |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
водила Н, но противопо- |
|||||||||||||||||||||||||
ложно направленную, т. е. ( ωН ).остиП и этом относительное движе- |
||||||||||||||||||||||||||||
ние |
звеньев не |
изменится, |
|
а угловые скорости в обращенном |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|||
движении будут следующими: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ωH |
ω ω |
|
, ωН |
|
о |
|
|
|
ω ω |
|
, ωН |
ω |
|
ω |
|
0. |
||||||||||||
Н |
ω ω |
Н |
, ωН |
Н |
Н |
Н |
||||||||||||||||||||||
1 |
|
1 |
|
|
2 |
2 |
|
|
|
3 |
|
|
3 |
|
|
|
Н |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Таким |
бра |
м, так как |
|
ωН |
0, |
|
то дифференциальный меха- |
||||||||||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
низм превратилсязв зубчатый механизм с неподвижными осями. |
||||||||||||||||||||||||||||
Для так |
|
|
бращенного механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
го |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
п |
|
|
ω1Н |
iН |
или |
ω1 |
ωН |
iН |
, |
|
|
|
|
(13.3) |
||||||||||||
|
|
|
|
ωН |
ω |
ω |
|
|
|
|
|
|||||||||||||||||
е |
|
|
|
|
13 |
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|||||||||
|
|
|
3 |
|
|
|
|
|
3 |
|
|
Н |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
iН |
– передаточное отношение обращенного механизма, |
опре- |
|||||||||||||||||||||||||
Р |
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
деляемое через число зубьев колес: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
iН |
|
z3 |
. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
119

Полученное выражение (13.3) называется формулой Виллиса. В общем случае формула Виллиса имеет вид
|
|
|
|
|
|
ωа |
|
ωН |
|
|
|
iН . |
|
|
|
ab |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
ωв |
|
ωН |
|
|
|
|
|
ав |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если в дифференциальном механизме одно из центральных ко- |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
лес сделать неподвижным, то |
получится |
планетарный механизм |
||||||||||||||||||||
(рис. 13.11). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|||||
|
|
3 |
|
т |
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
||||
|
|
из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Р с. 13.11. Планетарная передача |
|
|
||||||||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
формулы |
ω1 |
|
ωН |
iН получим: |
|
||||||||||||
Так как ω |
|
0, то |
|
|
|
|
||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
ω3 |
|
ωН |
|
|
|
|||
е |
|
|
|
|
|
|
ω1 |
|
|
|
|
ωН |
|
|
Н |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i13 ; |
|
|
|
|||
|
|
|
|
|
|
ωН |
|
ωН |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
i3 |
|
|
1 |
|
|
iН |
; |
|
|
|
||||||
Р |
|
|
|
|
|
|
|
1Н |
|
|
|
|
|
13 |
|
|
|
|
||||
|
|
|
|
|
|
|
i3 |
|
|
|
1 |
i |
Н . |
|
|
|
(13.4) |
|||||
|
|
|
|
|
|
|
|
1Н |
|
|
|
13 |
|
|
|
|
|
|||||
Выражение (13.4) называется формулой Виллиса для планетарных механизмов. В общем случае она имеет вид
120