

2.8 Определение величины уравновешивающей силы методом н.Е. Жуковского
Строим в произвольном масштабе план скоростей, повернутый на 90° относительно своего начального положения. К соответствующим точкам прикладываем активные силы и инерционные нагрузки (рисунок 2.13). Действие главных моментов сил инерции учитываем приведением этих моментов в соответствие с масштабом повернутого плана скоростей (этот метод был использован при расчете реакций в кинематических парах) или представляем момент в виде пары сил. Для того чтобы привести пример подобного расчета, используем второй способ.
![]()
![]()
Составляем уравнение моментов всех сил относительно полюса повернутого плана скоростей:
![]()
![]()
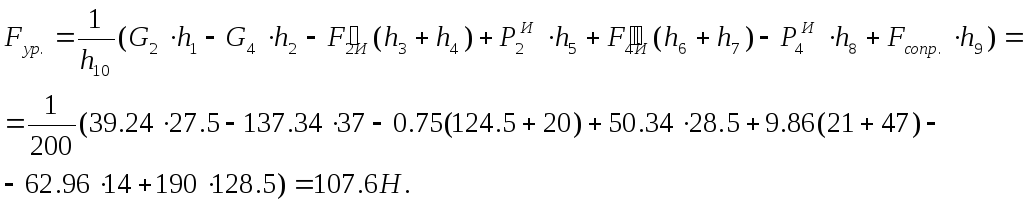
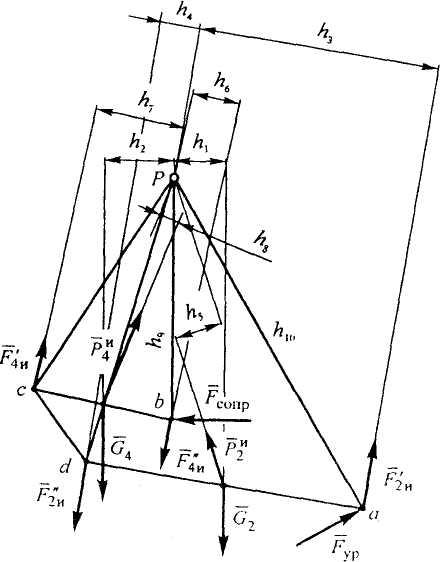
Рисунок 2.13 - Рычаг Жуковского.
Расхождение результатов при определении величины уравновешивающей силы различными способами:
![]() %=0,65%
%=0,65%
Точность считается удовлетворительной, если расхождение результатов составляет не более 8%.
2.9 Расчет величины уравновешивающего момента и потребной мощности двигателя в исследуемом положении механизма
Определяем величину уравновешивающего момента по формуле:
![]()
Потребная мощность двигателя для второго положения механизма:
![]()
Кроме того, потребную мощность двигателя можно было найти по формуле:
![]()
Расчет закончен.
3 Контрольная работа для студентов механических специальностей
3.1 Структурный и кинематический анализ и синтез механизмов
Контрольная работа состоит из четырех задач, в первой проводится структурный анализ схемы пространственного механизма манипулятора промышленного робота, во второй - определяется передаточное сложного зубчатого механизма, в третьей – выполняется проектирование схемы одного рычажного механизма.
Вариант контрольной работы выбирается по предпоследней цифре шифра студента, а вариант числовых значений определяется последней цифрой шифра.
ВАРИАНТ 0
Задача 1. Определить число степеней свободы и маневренность пространственного механизма манипулятора промышленного робота (рис.3.1,0).
Задача 2.
В четырехскоростной планетарной коробке
передач (рис.3.2,0;
табл.3.1) при
первой передаче включаются тормоза
![]() и
и![]() ,
при второй – тормоз
,
при второй – тормоз![]() и
муфта
и
муфта![]() ,
при третьей – тормоз
,
при третьей – тормоз![]() и муфта
и муфта![]() ,
при четвертой – муфты
,
при четвертой – муфты![]() и
и![]() .
Определить значения передаточных
отношений при различных передачах и
частоты вращения вала
.
Определить значения передаточных
отношений при различных передачах и
частоты вращения вала![]() ,
если числа зубьев колес
,
если числа зубьев колес![]() и частота вращения входного вала
и частота вращения входного вала![]() .
.
Задача 3.
Спроектировать схему механизма шарнирного
четырехзвенника (рис.3.3,0;
табл.3.2) по
трем положениям кривошипа AB
и трем положениям плоскости коромысла
CD.
Положения кривошипа задаются углами
![]() ,
а положения плоскости коромысла – в
виде трех последовательных положений
прямойDF(углы
,
а положения плоскости коромысла – в
виде трех последовательных положений
прямойDF(углы
![]() ),
принадлежащей этой плоскости. Даны
размеры
),
принадлежащей этой плоскости. Даны
размеры![]() и
и![]() .
Определить длины шатуна и коромысла
.
Определить длины шатуна и коромысла![]() и
и![]() ,
а также уголCDF.
,
а также уголCDF.
Таблица 3.1
|
Параметры |
Виды числовых значений | |||||||||
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
25 |
24 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
|
|
91 |
96 |
78 |
85 |
70 |
75 |
66 |
65 |
64 |
61 |
|
|
90 |
96 |
80 |
84 |
63 |
64 |
58 |
59 |
60 |
27 |
|
|
46 |
48 |
42 |
40 |
35 |
32 |
28 |
29 |
30 |
27 |
|
|
2800 |
3000 |
2900 |
3100 |
2500 |
3000 |
2700 |
2800 |
3000 |
3200 |
Таблица 3.2
|
Параметры |
Виды числовых значений
| |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
|
40 |
35 |
45 |
60 |
42 |
70 |
80 |
56 |
65 |
100 |
|
|
100 |
100 |
100 |
150 |
120 |
156 |
200 |
160 |
190 |
250 |
|
|
120 |
115 |
135 |
120 |
115 |
135 |
120 |
115 |
135 |
120 |
|
|
90 |
100 |
90 |
90 |
100 |
90 |
90 |
100 |
90 |
90 |
|
|
60 |
75 |
45 |
60 |
75 |
45 |
60 |
75 |
45 |
60 |
|
|
100 |
110 |
105 |
100 |
110 |
105 |
100 |
110 |
105 |
100 |
|
|
80 |
95 |
75 |
80 |
95 |
75 |
80 |
95 |
75 |
80 |
|
|
60 |
80 |
45 |
60 |
80 |
45 |
60 |
80 |
45 |
60 |
|
|
|
|
|
|
|
|
|
|
|
|