

Лабораторна робота №1
Час: 2 години
Тема: Косарки і граблі
Мета: Вивчити призначення, будову, основні регулювання, технологічний процес роботи та можливі несправності косарок і граблів
ЗМІСТ
Напівнавісна двобрусова косарка КДП-4,0, призначена для скошування природних і сіяних трав на великих площах, складається з рами 1 (рис. 1.1) з опорним колесом 2 і домкратами 6 і 11, ріжучих апаратів – переднього 13 і заднього 3, механізмів приводу і підйому ріжучих апаратів, тягового запобіжника 8.

Рис. 1.1. Напівнавісна двобрусна косарка КДП-4,0:
1 – рама; 2 – колесо; 3 і 13 – ріжучі апарати; 4 і 12 – гідроциліндри;
5 і 9 – клинопасові передачі; 6 і 11 – домкрати; 7 – ланцюгова передача;
8 – запобіжник; 10 – ланцюг; 14 – карданна передача; 15 – проміжна передача
До трактора косарку приєднують кронштейном навіски, що прикріплюється до подовжніх балок рами, і причіпною скобою. Третьою опорною точкою рами служить пневматичне колесо. Полегшують приєднання косарки до трактора два гвинтові домкрати.
Ріжучі апарати нормального різання з одинарним пробігом ножа. Ножі приводяться в дію від ВВП трактора. Механізм передачі складається з ланцюгової передачі 7, проміжною 15 і двох клинопасових 5 і 9 передач приводу валів ексцентриків. Проміжна передача є валом, встановленим на двох сферичних кулькових підшипниках. На задньому кінці валу закріплена ведена зірочка ланцюгової передачі та привідний шків клинопасової передачі приводу ексцентрикового валу заднього ріжучого апарату. До переднього кінця валу приєднана карданна передача 14 з коробкою провідного шківа приводу ексцентрикового валу переднього ріжучого апарату.
Механізми підйому ріжучих апаратів приводяться в дію двома виносними гідроциліндрами 4 і 12 односторонньої дії.
Різальний апарат (рис. 1.2) – основний робочий орган косарки, який складається з пальцьового бруса 1 і ножа 12, що здійснює зворотно-поступальний рух. Пальцьовий брус кріпиться до внутрішнього і зовнішнього 13 подільників, які спираються на сталеві полозки 14, за допомогою яких регулюється задана висота зрізу. До бруса 1 за допомогою болтів 2 кріпляться пальці 9 з протирізальними пластинами 8. Рухомий ніж 12 має головку 11 для приєднання до привідного шатуна та наклепані по всій довжині ножа сегменти 7.
Передньою частиною сегменти спираються на протирізальні пластини 8, а ззаду сегменти і спинка упираються у пластини тертя 3. Для того щоб сегменти ножа прилягали до протирізальних пластин, до пальцьового бруса прикріплені лапки 4, які унеможливлюють піднімання ножа вгору.
Ніж, рухаючись у пазу пальців, відхиляє лезами сегментів стебла, що потрапили між пальці, притискує їх до лез протирізальних пластин і зрізує. Польова дошка 15 відводить скошену траву вліво, звільняючи місце для проходження машин при новому заїзді. Подільник 10 під час руху косарки спрямовує стебла до різального апарата.
Тяговий запобіжник складається з причіпної вилки, хвостовик якої встановлений в корпусі запобіжника, клинового фіксатора з двома пружинами та регулювального ковпака. Вилка причепа утримується від осьового переміщення фіксатором, який своїм клиновим кінцем входить у відповідний паз хвостовика вилки. При збільшенні тягового зусилля фіксатор витискається з паза, і рама косарки відходить назад. При цьому палець передньої підвіски виходить з вушка кронштейна навіски, передня частина рами падає плитою переднього домкрата на землю і розгортається навколо задньої точки підвіски на кут не більш 30°. Кут повороту обмежується ланцюгом 10.
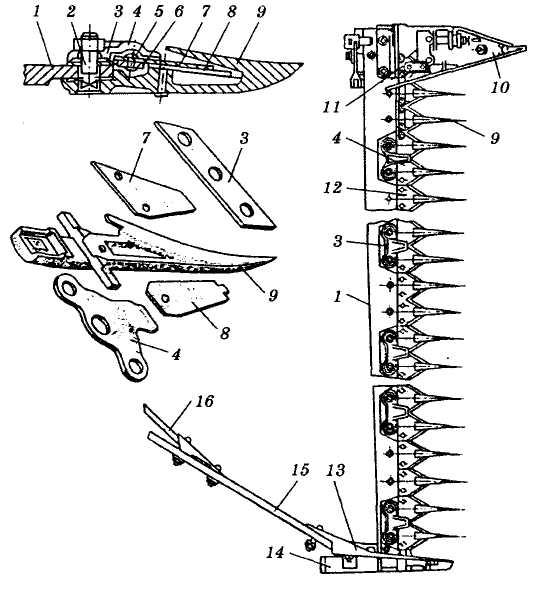
Рис. 1.2. Різальний апарат косарки:
1 – пальцьовий брус; 2 – болт; 3 – пластина тертя; 4 – притискна лапка;
5 – заклепка; 6 – спинка ножа; 7 – сегмент; 8 – протирізальна пластина;
9 – палець; 10 – внутрішній подільник; 11 – головка ножа; 12 – ніж;
13 – зовнішній подільник; 14 – опорний полозок; 15 – польова дошка;
16 – прутки-стеблевідводи
Ширина захвату косарки 4 м; маса 670 кг; продуктивність 3,4 га/ч.
Основні регулювання:
1. Регулювання різального апарата.
Для нормальної роботи косарок потрібно, щоб зовнішній кінець пальцьового бруса був винесений вперед в одно -, дво і трибрусних косарках на 35...55 мм відносно його внутрішнього кінця.
Виліт зовнішнього кінця пальцьового бруса перевіряють шнуром, натягнутим паралельно осі ходових коліс через носок пальця, розміщеного біля внутрішнього башмака. Відстань вимірюють між шнуром і носком, розміщеним біля зовнішнього башмака. Ця відстань повинна становити 40...55 мм і регулюється у косарки КДП-4,0 зміною довжини шпренгеля нагвинчуванням або згвинчуванням головки.
Якщо зміна довжини шпренгеля не забезпечує нормальної величини вильоту, то виліт можна додатково регулювати ексцентриковою втулкою.
В крайніх положеннях ножа осьової лінії сегментів не повинні доходити до осьових ліній пальців на 3 мм. Це забезпечують зміною довжини шатуна (нагвинчуванням або згвинчуванням його нижньої головки). Потім знову перевіряють правильність регулювання.
В задній частині між сегментами й вкладишами пальців повинен бути зазор у межах 0,5...1 мм.
Пальці, які мають зазор між носком сегмента та вкладишем, а також збільшений зазор між широкою частиною сегмента й вкладишем, треба підрихтувати легкими ударами молотка.
Притискачі ножа повинні злегка дотикатися до сегментів. При наявності зазору притискачі потрібно пригнути до сегментів легкими ударами молотка.
Спинка ножа повинна прилягати своєю тильною частиною до пластин тертя. Цього досягають пересуванням пластин тертя. У багатобрусних косарках перекриття між зовнішнім кінцем переднього різального апарата і внутрішнім башмаком заднього апарата повинно становити не менш як 60...100 мм. Перекриття регулюють зміною робочої довжини обох штанг різальних апаратів. Починають регулювання в різальних апаратах, розміщених у передній частині косарки.
2. Регулювання висоти зрізу.
Залежно від стану поверхні площі і типів сінокосів регулюють висоту розміщення пальцьового бруса над поверхнею перевертанням полозків внутрішнього й зовнішнього башмаків на отвори, розміщені вище або нижче. Якщо башмаки встановити на отвори, розміщені вище, висота зрізу збільшиться, а якщо на нижчі, - зменшиться.
Регулювання механізму підняття кожного різального апарата полягає в підбиранні робочої довжини тяги, що з‘єднує різальний апарат із гідропідйомником трактора (косарка КДП-4,). Робоча довжина тяги повинна бути такою, щоб внутрішній башмак різального апарата відривався від землі приблизно на 100...150 мм раніше, ніж зовнішній.
3. Регулювання встановлення польової дошки.
Щоб забезпечити відділення зрізаної трави від не зрізаної і очищення доріжки для проходу внутрішнього башмака заднього різального апарата, а також внутрішнього башмака при наступних заїздах, треба (залежно від висоти і переплутаності травостою) відігнути два верхніх прутки польової дошки: при високому переплутаному травостої верхній пруток відгинають вгору і вліво, а другий зверху – трохи вгору й вправо.
4. Регулювання тиску башмаків на ґрунт.
Тиск башмаків різальних апаратів на ґрунт регулюють натягуванням компенсаційних пружин так, щоб тиск внутрішніх башмаків становив 0,25...0,35 кН (25...35 кг), а зовнішніх – 0,08...0,15 кН (8...15 кг).
Косарка КРН-2,1. Силу тиску на грунт зовнішнього башмака 16 (рис. 63) встановлюють 100—300 Н натяжним пристроєм пружин 11, а внутрішнього 13 — пружинами 10 у межах 270 — 700 Н.
Кут похилу різального апарата (не більше 7°) встановлюють по ходу агрегату зміною довжини центральної тяги начіпної системи трактора. При цьому висота зрізу дещо зменшується і поліпшуються умови для скошування полеглого та переплутаного травостою. При прямостоячому травостої і висоті зрізу 60 мм різальний апарат встановлюють паралельно поверхні поля.
Ротаційна начіпна косарка КРН-2,1 служить для скошування високоврожайних, полеглих сіяних і природних трав з укладанням скошеної маси в прокошування. Ріжучий апарат косарки є брус 1 (рис. 1.3), на якому зверху встановлені ротори 2 з шарнірно закріпленими на кожному з них двома ножами 3.
У роботі брус спирається на два башмаки. Брус за допомогою підрамника 4 шарнірно приєднується до рами 6 косарки, що навішується на трактор. Для обмеження тиску ріжучого апарату на грунт і перекладу косарки в транспортне положення є механізм 7 зрівноваження, гідроциліндр якого приєднаний до рами навіски і за допомогою пружин пов’язаний з кронштейном 8 ріжучого апарату.

Рис. 1.3. Косарка ротаційна КРН-2,1:
1 – брус; 2 – ротор; 3 – ніж; 4 – підрамник; 5 – запобіжник; 6 – рама;
7 – механізм зрівноваження; 8 – кронштейн; 9 – огорожа; 10 – подільник
Ротори приводяться в дію від ВВП трактора через карданну, клинопасову, конічну і зубчату прямозубую передачі. Остання розташована в порожнині бруса, що є роз'ємним картером.
Ріжучий апарат забезпечений польовим подільником 10 і огорожею 9.
В процесі роботи ножі роторів, що мають швидкість 65 м/с, здійснюють безпідпірний зріз рослин. Ротори переміщають зрізану масу за брус. Запобіжник 5 служить для запобігання поломкам ріжучого апарату при зустрічі з перешкодою.
Основні регулювання:
Різальний апарат повинен знаходитись у горизонтальній площині і спиратися на ґрунт башмаками. Це забезпечується зміною довжини верхньої тяги трактора й натягом пружини механізму зрівноважування. Тиск зовнішнього башмака на ґрунт становить 0,1...0,3 кН (10...30кг), внутрішнього – 0,27...0,70 кН.
Граблі призначені для згрібання привяленої чи свіжоскошеної трави з покосів у валки, ворушіння трав у покосах, перевертання (обертання) та розкидання валків. Тракторні граблі можуть бути причіпними, напівначіпними та начіпними.
За характером утворення валків їх поділяють на поперечні і бокові. Залежно від конструкції робочих органів граблі бувають зубові поперечні, роторні та колісно-пальцьові. Зубові поперечні граблі згрібають сіно у валки, які розміщені впоперек до напрямку руху агрегату, а роторні та колісно-пальцьові – у поздовжні валки.
Для згрібання трави чи сіна у поперечні валки використовують причіпні поперечні ГП-14 і ГП-Ф-16 та напівначіпні ГП-Ф-10 і ГПП-6 граблі. На невеликих ділянках можна працювати їх середньою секцією.
Граблі поперечні ГП-14 складаються з грабельних апаратів 2 (рис. 1.4), які шарнірно закріплені на трьох секціях рами 1. До середньої секції кріпиться сниця 7 для приєднання граблів до трактора. У робочому положенні вони спираються на два ходових 4 і два самовстановлюваних колеса 9.

Рис. 1.4. Поперечні граблі ГП-14:
1 – рама; 2 – грабельний апарат; 3 – механізм піднімання грабельного апарату; 4 – ходове колесо; 5 – автомат піднімання; 6 – важіль вмикання автомата; 7 – сниця; 8 – причіп; 9 – самовстановлюване колесо; 10 – зуб; 11 – очисний прут
Піднімання грабельного апарата під час викидання валка, а також переведення його у транспортне положення здійснюється двома автоматами 5. На сучасних граблях для цього призначені гідроциліндри.
Зубовий грабельний апарат поперечних грабель складається із зубів 1 (рис. 1.5), зігнутих по дузі кола або логарифмічної спіралі, прикріплених за допомогою зуботримачів до поперечного бруса 2. Бруси із зубами шарнірно закріплені в кронштейнах 3 рами 4. Зуби утворюють порожнину, в якій при згрібанні формується вал. У верхній частині цієї порожнини розташовані очисні прути 5.

Рис. 1.5. Зубовий грабельний апарат поперечних грабель:
1 – зуб; 2 – брус; 3 – кронштейн; 4 – рама; 5 – очисна лозина; 6 – вал підйому; 7– кривошипа; 8 – тяга підйому
Під час роботи сіно, що підбирається зубами, накопичується в увігнутій частині грабельного апарату. Коли цей простір заповниться, включають механізм підйому. При включенні механізму починає обертатися вал підйому 6, який через кривошип 7 і тягу підйому 8 повертає грабельний брус із зубами.
Установлені на рамі зуби утворюють короб, у який сіно набирається під час руху граблів уздовж сінокосу. При цьому сіно згортається у пухкий і компактний валок.
Для згрібання сіна у поздовжні валки використовують причіпні граблі – колісно-пальцьові валкоутворювачі ГВК-6 та граблі – ротаційні зворушувачі-розпушувачі ГВР-6. їх застосовують також для ворушіння трави чи сіна у покосах, перевертання валків, утворених поперечними граблями.
Колісно-пальцьові граблі ГВК-6 складаються з лівої (рис. 1.6) і правої секцій, рами 4 причіпного пристрою з двома центральними робочими пальцьовими колесами 5.
Кожна секція може працювати окремо і складається з рами 14, опорної труби 11, переднього 12 і заднього 10 брусів, трьох опорних коліс 2 із пневматичними шинами, шести пальцьових коліс 3 із пружинами 7, механізму підйому з трубою 13 і рукояткою 8.

Рис. 1.6. Граблі колісно-пальцьові ГВК-6:
а – схема встановлення двох секцій грабель; б – схема встановлення правої секції для згрібання сіна і перевертання валків; в і г – робочий процес пальцьового колеса;
1 – ліва секція; 2 – опорне колесо; 3 – робочі пальцьові колеса; 4 – рама причіпного пристрою; 5 – центральні робочі пальцьові колеса; 6 – права секція; 7 – пружина робочого колеса; 8 – рукоятка механізму підйому;
9 – сінознімач; 10 – задній брус; 11 – опорна труба; 12 – передній брус; 13 – труба механізму підйому робочих коліс; 14 – рама грабель;
15 – пальці; 16 – обод; 17 – спиця; 18 – втулка
Пальцьові колеса 3 обертаються завдяки зчепленню зі стернею. Кожне з них посаджене на дві капронові втулки та зігнуту вісь. На осі приварений кронштейн з отворами для кріплення пружин і сінознімачів, а також обмежувач вертикального ходу пальцьового колеса. Пальцьові колеса 5 мають таку ж будову. Над ними для очищення від сіна встановлені прогумовані планки – чистики. Рукоятка 8 механізму переведення коліс з робочого положення в транспортне з’єднана з гвинтом труби, встановленої в стояках вздовж основного бруса рами. Гайка гвинта жорстко зв’язана з рамою. На трубі гвинта хомутиками кріплять пружини робочих коліс.
При обертанні рукоятки пружини діють на осі коліс, піднімаючи або опускаючи їх. Пересуванням хомутиків пружин на трубі механізму підйому регулюють тиск робочих коліс на ґрунт. Для переднього колеса він повинен становити 0,3 МПа, а для наступних зростати з інтервалом через 0,1 МПа. До осей опорних коліс приварені планки фіксаторів, які штирями з’єднані із секторами стояків рами і опорного бруса. Фіксація опорних коліс надає стійкості напрямку руху грабель.
Зчіпний пристрій грабель призначений для з’єднання секцій між собою. Він складається зі зварної рами, двох бокових розсувних розтяжок і двох висувних труб. Бокові розтяжки використовують як з’єднувальні ланки під час роботи трактора з однією секцією. На поперечній трубі рами зчіпного пристрою встановлені два центральних робочих колеса, призначені для ворушіння покосу між секціями.
При використанні грабель для згрібання сіна у валки секції з'єднують зчіпним пристроєм так, щоб вони утворили кут, направлений розхилом вперед (рис. 1.6, а, г), а пальцьові колеса розмістились під кутом а, найчастіше 45" до напрямку руху агрегату. Тоді пальці коліс, обертаючись, будуть переміщувати сіно в напрямку осі симетрії агрегату і утворювати валок шириною 80...90 см. Якщо останні пальцьові колеса не пропускають валок, секції слід розвести розсувними трубами та розтяжками зчіпного пристрою. Найбільша ширина валка може бути до 1,7 м.
Перевертати валки можна тільки однією секцією – правою чи лівою, залежно від вибраного напрямку перевертання і напрямку вітру.
Для переїздів на далекі відстані секції грабель транспортують цугом; зчіпний пристрій та середні пальцьові колеса закріплюють на рамах секцій. Ширина захвату – 6 м. Робоча швидкість – до 9 км/год. Продуктивність при згрібанні сіна – до 5,4 км/год.
Для згрібання трав чи сіна, обертання та розкидання валків сіна застосовують також ротаційні граблі.
Ротаційні граблі-розпушувачі ГВР-6Б (рис. 1.7) складаються з двох роторів 5, двох щитків 4 для формування валка, чотирьох опорних коліс, причіпного пристрою 6 та механізму приводу. Ротор складається з диска, до якого прикріплено сім граблин 2. На штангах граблин закріплено пружинні пальці 1. Під час роботи ротори, обертаючись від вала відбору потужності трактора, формують, обертають або розкидають валок, розпушують траву чи сіно в покосах.

Рис. 1.7. Ротаційні граблі-розпушувачі ГВР-6Б:
1 – пальці; 2 – граблина
3 – поперечний брус; 4 – щиток;
5 – ротор; 6 – причіпний пристрій